Выходной сигнал измерителя, как правило, недостаточен для непосредственного воздействия на регулирующий орган, поэтому приходится повышать мощность этого сигнала в усилителях мощности.
Усилитель мощности (УМ) – это устройство, в котором осуществляется увеличение мощности входного сигнала за счет вспомогательной энергии (W) постороннего источника (рис. 6.20).
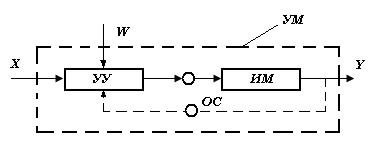
Рисунок 6.20. Структурная схема усилителя мощности:
УУ – управляющее устройство; ИМ – исполнительный механизм; ОС – обратная связь
Применяются усилители (по виду вспомогательной энергии) механические (по принципу рычага), гидравлические, пневматические, электрические и комбинированные. Принцип действия усилителей одинаков. Рабочая среда с энергией W подается к управляющему устройству (УУ) типа распределителя и с помощью сигнала Х осуществляется дозированный подвод вспомогательной энергии к исполнительному механизму (ИМ). Здесь энергия W преобразуется в механическую работу по перемещению выходного звена УМ. В УМ возможно наличие обратной связи (ОС), повышающей устойчивость работы усилителя.
Г и д р а в л и ч е с к и е у с и л и т е л и с о т с е ч н ы м з о л о т н и –
к о м и п о р ш н е м исполнительного механизма (ИМ) двустороннего действия представлены на рис. 6.21, а)
Масло под давлением Рр подводится к золотнику 3 управляющего устройства, расположенному во втулке 2. При нейтральном положении золотника, когда окна каналов к полости исполнительного механизма 1 перекрыты (рис.6.21, в), поршень 7 ИМ неподвижен.
При смещении золотника  от среднего положения происходит сообщение одной полости ИМ с напорной магистралью, другой – со сливной. Под перепадом давления поршень ИМ перемещается на величину
от среднего положения происходит сообщение одной полости ИМ с напорной магистралью, другой – со сливной. Под перепадом давления поршень ИМ перемещается на величину  .
.
Из условия неразрывности потока масла, поступающего через площадь проходного сечения F, открытую золотником УУ за время  и при пренебрежении силами сопротивления движения поршня, сжимаемостью масла и инерцией движущихся масс ИМ
и при пренебрежении силами сопротивления движения поршня, сжимаемостью масла и инерцией движущихся масс ИМ
 ,
,
где V – скорость потока масла в окне; F – площадь поршня ИМ.
При прямоугольных окнах втулки шириной b
 , откуда
, откуда  .
.

Рисунок 6.21. Функциональные схемы гидравлических усилителей с ЖОС
При условии, что  (в течение которого происходит перемещение
(в течение которого происходит перемещение  ) бесконечно мало, возможно записать уравнение движения УМ:
) бесконечно мало, возможно записать уравнение движения УМ:

Введем относительные координаты в полученное уравнение:
входная  , выходная
, выходная  .
.
Тогда  , или
, или  ,
,
где Т = FSmax: bVemax – время действия ИМ, определяемое как время перемещения поршня из одного крайнего положения в другое при максимальном значении входной координаты х = 1;
Если выходной сигнал ИМ необходимо получить в виде поворота  (рис. 6.21, б), то вместо поршневого ИМ присоединяют к УУ л о п а с т н о й и с п о л - н и т е л ь н ы й м е х а н и з м д в у с т о р о н н е г о д е й с т в и я.
(рис. 6.21, б), то вместо поршневого ИМ присоединяют к УУ л о п а с т н о й и с п о л - н и т е л ь н ы й м е х а н и з м д в у с т о р о н н е г о д е й с т в и я.
Г и д р а в л и ч е с к и й у с и л и т е л ь с д и ф ф е р е н ц и а л ь н ы м п о р ш н е в ы м и с п о л н и т е л ь н ы м м е х а н и з м о м (рис. 6.21, в). Активная площадь нижнего основания поршня 7 значительно больше площади верхнего основания. Верхняя полость неуправляема, в нее по каналу 8 поступает масло под давлением Рр из напорной магистрали. При среднем положении золотник 3 закрывает канал 9 и поршень неподвижен. Смещение ∆е золотника вверх приводит к сообщению нижней полости со сливом и поршень перемещается вниз. Смещение золотника вниз приводит под действием перепада давлений к движению поршня вверх.
Если установить на магистрали, связывающей окно золотника с полостью поршня ИМ, дроссель, то появляется возможность регулировать время действия УМ 
Г и д р а в л и ч е с к и й у с и л и т е л ь с ж е с т к о й о б р а т н о й
с в я з ь ю (ЖОС) представлен на рис. 6.22.
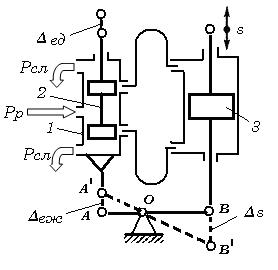
Рисунок 6.22. Функциональная схема гидравлического усилителя с ЖОС
Он отличается от усилителя (рис. 6.21, а) тем, что через рычаг жесткой обратной связи (кинематической) АОВ передается обратное воздействие от поршня 3 ИМ на подвижную втулку 1 УУ. Если золотник 2 смещается относительно втулки из среднего положения вверх на расстояние  , то верхняя полость ИМ сообщается с напорной магистралью, а нижняя – со сливной. Поршень 3 движется вниз и разворачивает рычаг АОВ в положение А’О’B’ перемещая втулку вверх на расстояние
, то верхняя полость ИМ сообщается с напорной магистралью, а нижняя – со сливной. Поршень 3 движется вниз и разворачивает рычаг АОВ в положение А’О’B’ перемещая втулку вверх на расстояние  и тем самым перекрывая золотником окна. Движение поршня прекращается.
и тем самым перекрывая золотником окна. Движение поршня прекращается.
Такая обратная связь, принцип действия которой основан на компенсации перемещений, является кинематической жесткой обратной связью. Такая связь обеспечивает как бы слежение выходной координаты за входной. Это следящая ЖОС. Таким образом,
 , где
, где  .
.
После подстановки значения  в формулу (8) получим
в формулу (8) получим
 .
.
После введения относительных координат  и
и  получаем выражение
получаем выражение  ,
,
где  – коэффициент статической передачи ЖОС,
– коэффициент статической передачи ЖОС,
 .
.
В эксплуатации встречаются и другие виды гидравлических усилителей, например, с УУ типа дроссель переменного сечения и ИМ одностороннего действия
П н е в м а т и ч е с к и е у с и л и т е л и с р а с п р е д е л и т е л е м
в о з д у х а типа сопло – заслонка (рис. 6.23) работают по принципу дросселирования.
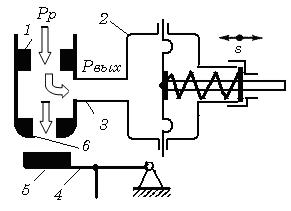
Рисунок 6.23. Функциональная схема пневматического усилителя
с соплом-заслонкой.
УУ усилителя состоит из дросселя 1 постоянного сечения, к которому подводится рабочий воздух при постоянном давлении Рр, и дросселя переменного сечения в виде сопла 6 инжекционного типа с заслонкой 5, перемещаемой датчиком с помощью рычага 4. Последовательно расположенные дроссели образуют делитель давления воздуха. Выходное давление Рвых в трубопроводе 3 и в полости ИМ 2 зависит от зазора между заслонкой 5 и соплом 6, через которое воздух стравливается в атмосферу.
Эти УМ называют расходными усилителями. Недостатком подобных УМ являются затраты энергии на работу компрессоров и очистку рабочего воздуха.
П н е в м а т и ч е с к и й б е з р а с х о д н ы й к о м п е н с а ц и о н н ы й у с и л и т е л ь (рис. 6.24, а) является однокаскадным усилителем. Он представляет собой камеру 3, в которой расположен шток с клапанами. Верхний клапан 2 прижимается пружиной 1 к неподвижному седлу штуцера, к которому подводится воздух постоянного давления Рр. На нижний клапан 7 опирается подвижное седло 6, закрепленное на эластичной мембране 8. Полость камеры 3 соединена трубопроводом 4 с мембранным ИМ 5 одностороннего действия.
Работа УМ основана на принципе компенсации усилий. Входным параметром является усилие Fд действующее от датчика на седло мембраны.
При установившемся режиме оба клапана закрыты, а величина выходного сигнала Рвых пропорциональна силе Fд При изменении силы Fд открываются либо верхний, либо нижний клапан, что соответственно приводит к изменению давления Рвых и пропорциональному перемещению штока ИМ. Усилитель является статическим.

Рисунок 6.24. Функциональные схемы безрасходных
пневматических усилителей
При необходимости обеспечения высокого быстродействия при большой выходной мощности применяют д в у х к а с к а д н ы е у с и л и т е л и с д р о с с е л ь н ы м УУ в п е р в о м к а с к а д е и к о м п е н с а ц и о н- н ы м УУ в о в т о р о м (рис. 6.24, б).
Входным параметром усилителя является положение yд заслонки 10 относительно сопла 11, которое однозначно определяет давление воздуха, поступающего через дроссель 9 в междроссельную камеру Г. Управляющее устройство второго каскада состоит из трех раздельных камер А, Б, В.
Рабочий воздух под давлением Рр = 1,4•105 Па подводится в камеру А, которая через шариковый клапан 15 сообщается с камерой Б. В камере Б формируется выходной сигнал Рвых, идущий к мембранному ИМ одностороннего действия (на схеме не показан). Камера В постоянно сообщена с атмосферой и образована двумя мембранами 12 одинаковой активной площади с общим жестким центром, отделяющим камеру Б от Г.
При перемещении датчиком заслонки 10 вверх давление в полости Г уменьшится и жесткий центр с мембранами 12 переместится вверх, снижая давление Рвых за счет перетекания воздуха из объема Б в объем В.
При движении yд вниз давление в полости Г повысится, что обеспечит перемещение клапана 15 и увеличение давления Рвых. Давление в камере Б изменяется до тех пор, пока не сравняется с давлением в камере Г. Поэтому каждому значению yд соответствует определенное значение выходного давления. УМ является статическим звеном. Данная схема получила широкое применение в судовой автоматике.
Э л е к т р о м а г н и т н ы й у с и л и т е л ь (рис. 6.25) В реальных условиях эксплуатации судовых систем очень часто необходимо в течение продолжительного времени изменять или поддерживать постоянными значения каких-либо физических величин (частоту вращения, напряжение, температуру, давление и т. д.), характеризующих работу машины, технологический процесс.
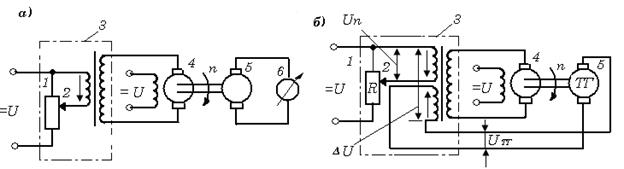
Рисунок 6.25. Схема систем регулирования частоты вращения электродвигателя:
а – работающей по разомкнутому циклу: б – работающему по замкнутому циклу.
Процесс регулирования может осуществляться по разомкнутому или замкнутому циклу (контуру). На рисунке 6.25 показаны схемы систем регулирования частоты вращения электродвигателя постоянного тока.
В системе разомкнутого цикла (рис. 6.25, а) перемещение (вручную или каким-либо механизмом) движка 2 потенциометра 1 изменяет напряжение на входе усилителя 3. Изменение напряжения приводит к изменению тока в обмотке якоря электродвигателя 4, что и вызывает изменение его частоты вращения, которая измеряется тахометром 5, соединенным с вольтметром 6. Такие системы не обеспечивают высокой точности.
Схема рис. 6.25,б отличается от предыдущей тем, что напряжение тахогенератора 5 сравнивается на входе усилителя 3 с напряжением, которое поступает с потенциометра 1. Если частота вращения электродвигателя отличается от заданной, то возникает сигнал ошибки ∆U = Un — Uтг,который после усилителя 3 поступает на обмотку якоря электродвигателя. При этом сигнал ошибки ∆U уменьшается до допустимого значения, а частота вращения возвращается к заданному значению.
Э л е к т р о н н ы й у с и л и т е л ь. В судовых электроустановках наиболее широко применяют полупроводниковые усилители. В зависимости от вида входного сигнала различают усилители тока, напряжения и мощности. Многокаскадные транзисторные усилители, обеспечивающие высокий к.п.д. при низких напряжениях питания и больших токах, протекающих через потребитель, широко используют в силовых системах автоматики. В общем виде усилительное устройство можно представить как активный четырехполюсник, имеющий два входных зажима, к которым подходит подлежащий усилению сигнал, и два выходных, с которых усиленный сигнал поступает в цепь потребителя.
Рассмотрим работу схемы (рис. 6.26) усилительного каскада, который нашел наибольшее распространение.
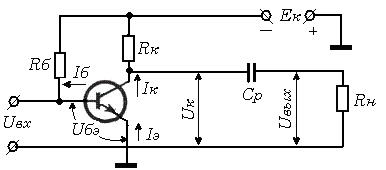
Рисунок 6.26. Усилитель с общим эмиттером.
Входной сигнал Uвх подается на вход схемы между базой и эмиттером транзистора, а выходной сигнал Uвых снимается либо между коллектором и эмиттером, либо между коллектором и источником питания. Резистор Rк в цепи коллектора служит для создания выходного напряжения каскада. Если Rк = 0, напряжение на нем тоже равно нулю и Uвых не меняется. Переменная составляющая коллекторного напряжения Uк через разделительный конденсатор Cp подается на следующий каскад или в цепь потребителя Rн. Резистор R6 задает ток базы, и от резистора зависит, на какой из выходных характеристик работает транзистор.
При Uвх = 0 в цепях базы и коллектора протекают постоянные токи покоя Iб.п. и Iк.п. На коллекторе устанавливается постоянное отрицательное напряжение Uк.п. . = Ек.п. - Iк.п • Rн. Под воздействием входного переменного напряжения ток базы изменяется, вызывая изменения тока коллектора, а значит, и коллекторного напряжения. Это вытекает из того, что с увеличением тока коллектора увеличивается напряжение ΔURк на резисторе. Следовательно, фаза выходного напряжения Uвых относительно входного Uвх отличается на 180°. Исходную точку покоя Р на выходной характеристике транзистора выбирают с учетом допустимых искажений и к. п. д. схемы.
Двухкаскадный усилитель (рис. 6.27) представляет собой два усилителя. Предоконечный каскад - это однотактный усилитель, основой которого служит транзистор VT3. Оконечный каскад состоит из транзисторов VT1 и VT2 и работает по двухтактной схеме.
Если сигнал Uу (t) = 0, в цепях эмиттера, коллектора и базы транзисторов каждого плеча протекают токи покоя, направления которых показаны на схеме. Через делитель напряжения, состоящего из резисторов R1, R2 и R3, проходит ток I = I дел + (Iб1 + Iб2), создающий напряжение, которое через вторичную обмотку трансформатора Т1 подается на базы транзисторов VT1 и VT2.
При подаче на вход усилителя сигнала Uу (t) через первичную обмотку трансформатора Т1 потечет переменная составляющая коллекторного тока iк транзистора VT3. Во вторичной обмотке Т1, которая имеет выход от средней точки, возникает переменное напряжение, и на базах транзисторов VT1 и VT2 будут действовать два равных напряжения, сдвинутых по фазе на 180°. При таких фазовых соотношениях напряжений увеличение тока в коллекторной цепи одного плеча будет сопровождаться уменьшением тока в коллекторной цепи транзистора второго плеча усилителя

Рисунок 6.27. Принципиальная схема усилителя мощности.
Фазочувствительные усилители применяют для питания обмоток управления электромашинных и магнитных усилителей, а также обмоток асинхронных двигателей, дифференциальных реле, возбуждения микродвигателей и др.
Регулирующие органы
Регулирующие органы (РО) служат для управления подводом (отводом) вещества или энергии в объекты регулирования с целью изменения регулируемого параметра.

Рисунок 6.28. Схемы регулирующих органов
По роду протекающего вещества или энергии РО делят на пневматические, гидравлические и электрические.
Пневматические и гидравлические по конструктивному исполнению делят на клапанные одно - и двухседельные (рис. 6.28, а и б), поворотные заслонки (рис. 6.28, в), трехходовые клапана (рис. 6.28, г), клапанно-золотниковые (рис. 6.28, д) и золотниковые (рис. 6.28, е). Схема действия этих РО очевидна.
Входной координатой РО является перемещение штока или разворот золотника, выходной координатой – проходное сечение f или расход W рабочей среды под действием перепада давлений Δp.
Уравнение статики запишется в следующем виде:
 ,
,
где расход рабочей среды определится перепадом давлений на участке РО
 .
.
Электрическими РО являются контакты электромагнитных реле и пускателей, транзисторы, тиристоры, электромашинные преобразователи и т. п.
Уравнение статики линейно связывает входную и выходную координаты, если РО представляет собою электронный прибор, или дискретно, если РО представлен контактами электромагнитного реле.
Электрические регулирующие органы получили широкое применение в системах судовой автоматики.
При проектировании регулирующих органов и в эксплуатации стараются обеспечить линейную зависимость между входной и выходной координатами.
Для того чтобы использовать положительные свойства автоматических систем с управлением по ошибке и по возмущающему воздействию, были предложены комбинированные системы автоматического управления (рис 6.29), где:
· g – задающее воздействие;
· f – возмущающее воздействие;
· y – управляемая величина.
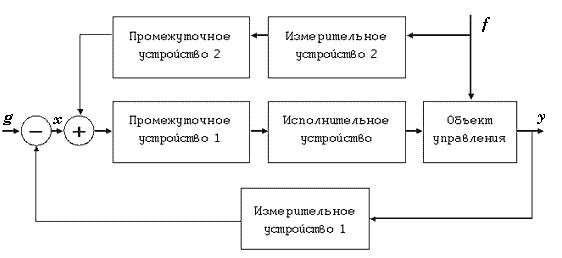
Рисунок 6.29. Комбинированная система автоматического управления.
Такие системы нашли широкое применение в системах автоматического регулирования напряжения судовых синхронных генераторов. В электроэнергетике они получили название систем компаундирования.
Основным возмущающим воздействием для синхронных генераторов, вызывающим изменение величины напряжения генератора, является ток нагрузки генератора. При токовом компаундировании используется компенсирующий сигнал, зависящий только от величины тока. При фазовом компаундировании используется компенсирующий сигнал, зависящий и от величины тока, и от напряжения фаз.
Компаундирующее действие схемы рис. 6.30 зависит только от величины тока и не зависит от его фазы. Поэтому при индуктивной нагрузке это действие слабее, чем при активной нагрузке.

Рисунок 6.30. Система возбуждения с токовым компаундированием
Такое компаундирование называется токовым, и при этом постоянство напряжения U в пределах диапазона нормальных нагрузок удается сохранять с точностью до ±(5-10)%. Такая точность для современных установок недостаточна, и поэтому в схемах рис. 6.30 применяется дополнительный корректор или автоматический регулятор напряжения 11, который соединен с помощью трансформатора 10 с зажимами генератора, а также с установочным реостатом 8. Регулятор 11 реагирует на изменения напряжения U и тока I и питает постоянным током дополнительную обмотку возбуждения возбудителя 5. Он состоит из статических элементов (магнитный усилитель, насыщенный трансформатор, полупроводниковые выпрямители и др.). Подобная система возбуждения на современных судах давно не используется.
Типичная схема компаундированного генератора с самовозбуждением изображена на рис.6.31
Вторичная ЭДС параллельного трансформатора 3 пропорциональна U, а вторичная ЭДС последовательного трансформатора 5 пропорциональна I. Вторичные обмотки этих трансформаторов включены параллельно и ток возбуждения if ~ If зависит не только от величины тока нагрузки I, но и от его фазы, вследствие чего схема рис.6.31 называется схемой фазового компаундирования. Это позволяет усиливать компаундирующее действие системы возбуждения при индуктивной нагрузке генератора, поскольку индуктивная составляющая тока нагрузки генератора вызывает наибольшее падение напряжения.
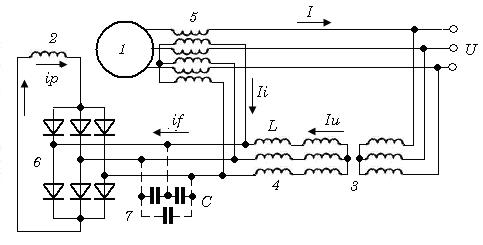
If = Iu + Ii
Рисунок 6.31 Система самовозбуждения с фазовым компаундированием
.