Регуляторы и элементы систем судовой автоматики в значительной мере определяют технические и экономические показатели судовых энергетических установок. В процессе эксплуатации необходимо внимательно следить за работой и состоянием самих регуляторов и объектов регулирования, соблюдать сроки и объемы профилактических осмотров, ремонтов. Обслуживающий персонал должен быть ознакомлен с устройством и особенностями конструкции регуляторов и объектов, знать соответствующую информацию об элементах судовой автоматики по техническим инструкциям и ТУ к изделиям.
Проверку работы и правильности статической настройки элементов судовой автоматики в эксплуатации производят периодически. Это позволяет поддерживать установленные параметры на требуемом уровне.
В первую очередь необходимо знать структурную и функциональную схемы САР, места отбора регулируемого параметра, способы воздействия и фиксации исполнительных органов. У места отбора импульса должен быть включен измерительный прибор, а у регулирующего органа – измеритель его положения: у регуляторов давления, например, со скрытым регулирующим органом должен быть включен манометр, позволяющий (пусть и косвенно) судить об интенсивности регулирующего действия на процесс. Должен быть продуман метод измерения или оценка условия нагрузки автоматизированного агрегата. автоматизации.
В эксплуатации СЭУ часто выявляется несоответствие реальных характеристик и показателей переходного процесса САР и ее элементов паспортным. Необходимо установить место и причины неисправности или нарушения настройки какого-либо звена системы.
Характеристики отдельных элементов можно определить при неработающей САР, когда входное воздействие удается каким-либо образом имитировать.
Главное, до начала проверки правильности настройки или ее корректировки необходимо убедиться в том, что настроечные приспособления регуляторов находятся в нужных положениях.
Часто достаточно убедиться визуально, что звено правильно реагирует на входное воздействие.
Настройки элементов САР, при которых устанавливается соответствие входных и выходных величин каждого звена, как правило, взаимосвязаны. На рис. 6.32 представлен алгоритм проверки правильности настройки системы автоматического регулирования.
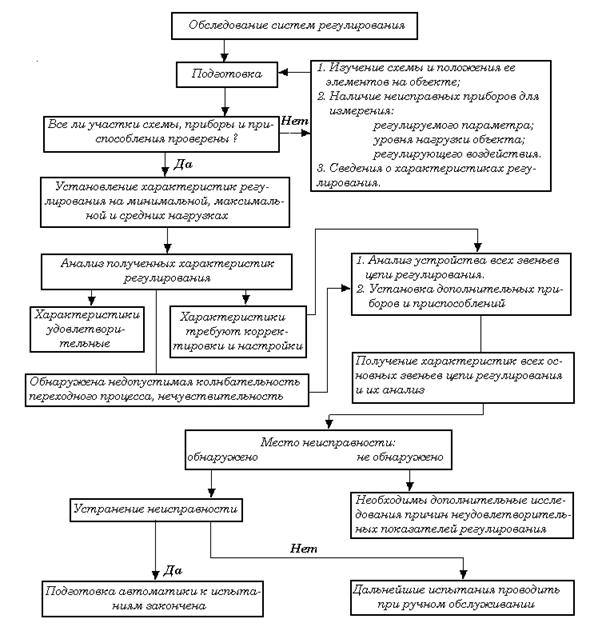
Рисунок 6.32. Алгоритм проверки правильности настройки САР.
МикроЭВМ четвертого поколения открывают широкие возможности для организации непосредственного цифрового управления, параметрического контроля, безразборной диагностики, прогнозирования состояния отдельных объектов, оптимизации работы судовых энергетических установок и обеспечения комплексной проверки.
Ресурсные характеристики современных управляющих микроЭВМ обеспечивают требования Регистра РФ и международной ассоциации классификационных обществ (МАКО). Так, например, межремонтный ресурс достигает 25000 часов, ежегодная наработка без подрегулировок и наладок – 5000 часов, выполняются требования по безотказности при длительном крене судна (до 22,5 о) и длительном дифференте (до 10о), а также при бортовой качке до 45о с периодом 5...17 с.
Значительно хуже дело обстоит со средствами так называемой периферийной автоматики (датчики, сигнализаторы), общее количество которых на современных судах достигает от 500 до 700 единиц. До 75% датчиков имеют ресурс порядка от 5000 до 7000 часов при фактической наработке от 2000 до 3000 часов. Именно это обстоятельство сдерживает и ограничивает широкое применение микроЭВМ в эксплуатации.
Статистика аварий на автоматизированных судовых установках утверждает, что 43% всех аварий происходят по вине обслуживающего персонала, 26% связаны с недостатками в конструкции и схемах, 14% - скрытые дефекты, 7% - износ, 10% приходятся на случайные причины.
Диагностирование и прогнозирование состояния объектов управления и их систем позволяют обнаружить скрытые дефекты и назревающие отказы, в том числе связанные с ошибками обслуживающего персонала.
Основной частью информационной модели диагностирования и прогнозирования является математическая модель реального объекта, описывающая его функционирование в идеальном состоянии и при различных режимах его работы (рис.6.33).
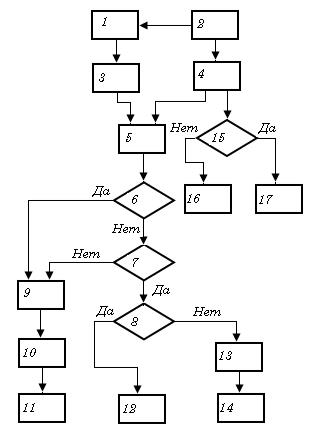
Рисунок 6.33. Информационная модель организации
диагностического и прогностического контроля:
1-математическая модель идеального объекта;
2-реальный объект;
3-идеальные значения параметров, получаемые с помощью модели;
4-текущие значения параметров, получаемые с выхода реального объекта;
5-определение отклонения параметров;
6-определение наличия сигнала «вызов оператором прогностического контроля»;
7-сравнение текущих значений и отклонений параметров с аварийными уставками;
8-результат сравнения;
9-анализ текущих и предшествующих значений отклонений;
10-долго- и краткосрочные прогнозируемые периоды до ремонта оборудования;
11-выдача оператору данных о сроках проведения ремонта;
12-выдача оператору сигнала о необходимости проведения ремонта;
13-диагностика состояния объекта;
14-выдача оператору рекомендаций по устранению неполадок;
15-сравнение текущих значений параметров с допустимыми уставками;
16-выдача оператору сигнала об отсутствии отклонений параметров;
17-выдача оператору сигнала тревоги.
Отклонения текущих важнейших параметров от их идеальных значений, определенных по математической модели при аналогичных условиях работы реальности, позволяют оценить снижение эффективности работы установки, ее износ, наличие отказов и т.п.
Полученные значения отклонений сравниваются с их допустимыми и аварийными значениями и при определенных условиях оператору выдаются сигналы о необходимости проведения ремонта, снижению нагрузки или рекомендации по устранению неисправностей. Значения отклонений важнейших параметров, вычисленные в предшествующие моменты времени, используются для формирования долго- и краткосрочных прогнозов.
Как правило, процессы регулирования САР описывают с помощью дифференциальных уравнений, а процессы управления – с помощью уравнений алгебры Буля (логических уравнений). Сам процесс математического описания поведения системы управления называется алгоритмизацией.
Принято представлять весь процесс управления в виде отдельных элементарных операций (Ai – математических операторов), которые записываются в строку и нумеруются слева направо в порядке их выполнения. Если естественный ход зависит от получаемой информации, то после оператора ставится логическое условие Pi, которое может принимать два значения: 1- при его выполнении; 0 – если оно не выполняется. В первом случае происходит переход к следующему оператору, во втором – к тому оператору, на который указывает стрелка  с его порядковым номером, у оператора, которому передается управление, также ставится стрелка
с его порядковым номером, у оператора, которому передается управление, также ставится стрелка  с номером того логического условия, от которого произошел переход. Запись алгоритма имеет следующий вид:
с номером того логического условия, от которого произошел переход. Запись алгоритма имеет следующий вид:

Алгоритм читается так: выполнить оператор  , затем
, затем  и далее до
и далее до  , проверить полученный результат по условию
, проверить полученный результат по условию  . Если =1, то перейти к реализации следующего оператора
. Если =1, то перейти к реализации следующего оператора  , иначе (при =0) выполнить оператор
, иначе (при =0) выполнить оператор  и
и  .
.
Для использования математического аппарата логических схем алгоритмов (ЛСА) функционирования СЭУ вводятся следующие обозначения входных и выходных данных, операторов и логических условий:
 и
и  - операторы начала и конца процесса управления (l=1, 2, 3...n –индексы номера алгоритма в общей схеме управления);
- операторы начала и конца процесса управления (l=1, 2, 3...n –индексы номера алгоритма в общей схеме управления);
 - оператор арифметических и логических вычислений (здесь
- оператор арифметических и логических вычислений (здесь  -расчетная зависимость, х- аргумент, принимающий различные значения для непрерывных и дискретных функций);
-расчетная зависимость, х- аргумент, принимающий различные значения для непрерывных и дискретных функций);
 - оператор ввода информации от датчиков (здесь Т и Р – вид датчиков, например, температуры и давления), n - номер датчика, k - вид двигателя, системы, механизма, на котором установлен датчик,
- оператор ввода информации от датчиков (здесь Т и Р – вид датчиков, например, температуры и давления), n - номер датчика, k - вид двигателя, системы, механизма, на котором установлен датчик,  - текущие значения параметров;
- текущие значения параметров;
 - оператор выдачи управляющих воздействий на исполнительные органы (здесь
- оператор выдачи управляющих воздействий на исполнительные органы (здесь  -двоичная функция, определяющая состояние управляющего воздействия по поступающим сигналам). Адрес исполнительного органа обозначают тремя последовательными знаками: В, С,...- тип исполнительного органа (например, клапан, система сигнализации);
-двоичная функция, определяющая состояние управляющего воздействия по поступающим сигналам). Адрес исполнительного органа обозначают тремя последовательными знаками: В, С,...- тип исполнительного органа (например, клапан, система сигнализации);  - номер исполнительного органа;
- номер исполнительного органа;  - вид двигателя, системы механизма, в которых установлен исполнительный орган. Перед адресом указывается род привода (э-электрический, п-пневматический). Для обозначения открытия (закрытия) исполнительного органа используют знаки
- вид двигателя, системы механизма, в которых установлен исполнительный орган. Перед адресом указывается род привода (э-электрический, п-пневматический). Для обозначения открытия (закрытия) исполнительного органа используют знаки 
 : (
: ( :);
:);
 - оператор запоминания промежуточных результатов;
- оператор запоминания промежуточных результатов;
 - оператор воздействия на средства представления информации, например, “сигнализировать, что
- оператор воздействия на средства представления информации, например, “сигнализировать, что  - клапан - системы не открылся”;
- клапан - системы не открылся”;
 - условный останов (пауза).
- условный останов (пауза).
Логические условия:
 - проверка результатов выполнения оператора (здесь
- проверка результатов выполнения оператора (здесь  - результат расчета, логическое заключение;
- результат расчета, логическое заключение;  - знаки условия: <, >, = и т.д.;
- знаки условия: <, >, = и т.д.;  - постоянная величина, равная 1 или 0);
- постоянная величина, равная 1 или 0);
 - контроль времени (учет реального масштаба времени).
- контроль времени (учет реального масштаба времени).
Алгоритм функционирования можно представить в виде граф-схемы, если принять следующую интерпретацию его функциональных элементов. Конечное множество преобразователей  соответствует действию при управлении (управляющие воздействия, логические заключения, вычисления, сигналы оповещения) и обозначается в виде прямоугольников, внутри которых записаны операторы. Начало и конец алгоритма условно обозначаются овалами.
соответствует действию при управлении (управляющие воздействия, логические заключения, вычисления, сигналы оповещения) и обозначается в виде прямоугольников, внутри которых записаны операторы. Начало и конец алгоритма условно обозначаются овалами.