УСПОКОИТЕЛИ КОЛЕБАНИЙ
ПОДВИЖНЫХ СИСТЕМ ПРИБОРОВ
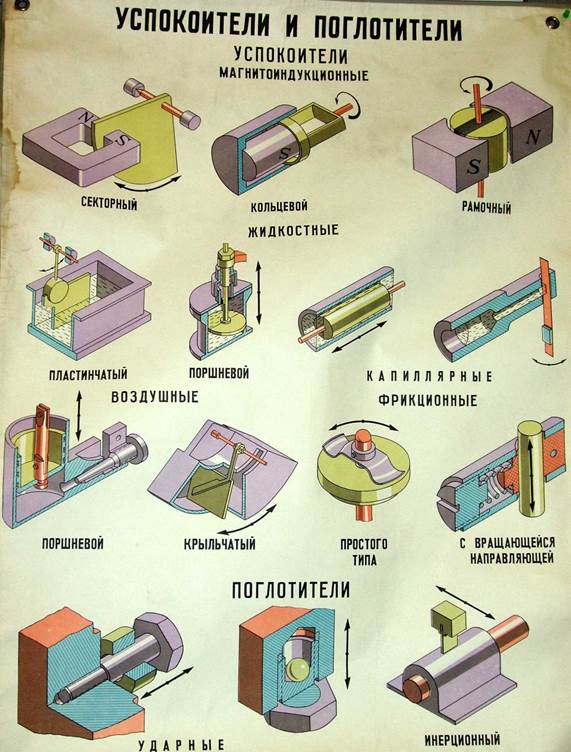
Успокоители (У), или демпферы, применяют в подвижных системах приборов, имеющих собственные колебания, для ускорения процессов успокоения (приведение в состояние покоя, равновесия).
Применение успокоителя в приборах с показывающим отсчетным устройством уменьшает время при отсчете показаний с минимальной погрешностью.
У уменьшают погрешность в измерительных регистрирующих устройствах, где собственные колебания движущихся частей прибора накладываются на запись колебаний измеряемой величины, искажая тем самым результат записи показаний.
Принцип действия успокоителя. Успокоитель создает дополнительное торможение, которое гасит (снижает по определенному закону) собственные (свободные) колебания подвижной системы прибора.
1. Краткие ОСНОВЫТЕОРИИ УСПОКОЕНИЯ
Уравнение вращательного движения твердого тела можно записать в виде [1].
  , ,
| (1) |
где J и e - соответственно, момент инерции подвижной системы прибора и ее угловое ускорение относительно оси вращения;  -- сумма моментов всех внешних сил действующих на подвижную систему. В общем случае
-- сумма моментов всех внешних сил действующих на подвижную систему. В общем случае
 , ,
| (2) |
здесь
Мв — вращающий момент, приводящий в движение подвижную систему;
Мп = Dj — противодействующий момент пружины, где D — удельный противодействующий момент пружины, численно равный моменту пружины при угле ее закручивания на 1 рад; j — угол отклонения подвижной системы от положения равновесия в момент времени t; Мтр — момент трения в опорах вала подвижной системы прибора;
Му — момент торможения успокоителя; действие успокоителя наиболее эффективно, когда Му пропорционален первой степени скорости, т. е. когда
Му = Сw,
где w — угловая скорость подвижной системы; С — коэффициент успокоения, численно равный значению Му при w = 1 рад/с.
Перенеся правую часть в уравнении влево, уравнение можно записать в виде

| (3) |
(
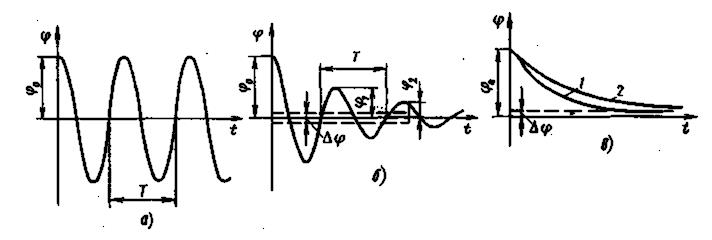
Рис. 1. Законы движения подвижных систем приборов
Момент сил трения подвижной системы в приборах, как правило, незначителен, и им можно пренебречь, т. е. можно предположить Мтр = 0 в формуле (3), тогда получим

| (4) |
Рассмотрим простейший (идеальный) случай движения, когда источник энергии движения выключен (Мв = 0) и успокоитель отсутствует (Му = 0). Дифференциальное уравнение колебаний подвижной системы в этом случае
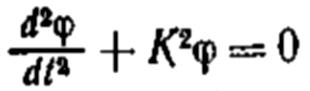
| (5) |
где  — круговая частота собственных колебаний. Решение этого дифф.уравнения (5) имеет вид
— круговая частота собственных колебаний. Решение этого дифф.уравнения (5) имеет вид

| (6) |
где j0 — угол отклонения от начального положения равновесия в момент времени t = 0.
Из формулы (6) следует, что подвижная система прибора, отклоненная от положения равновесия на угол j0, будет все время совершать незатухающие гармонические колебания по закону косинуса (рис. 1, а) с периодом 

Максимальное отклонение подвижной системы за половину периода называется амплитудой колебания. В рассмотренном случае она постоянна и равна j0.
В действительности собственные колебания подвижной системы будут медленно затухать даже от незначительного момента трения Мтр.
Для более быстрого затухания собственных колебаний подвижной системы применяют успокоители.
При наличии успокоителя с моментом Му = Сw, дифференциальное уравнение движения имеет вид:

| (7) |
где  — степень успокоения.
— степень успокоения.
Из уравнения (7) следует, что его решение, т. е. функция φ =f(t), зависит от степени успокоения β. При значениях β< 1 имеют место затухающие гармонические колебания (рис. 1, б). При значениях β = 1 (кривая 1 на рис. 1, в) и (β > 1 (кривая 2 на рис. 1, в) колебания отсутствуют, и подвижная система плавно возвращается к положению равновесия. Такое движение называется апериодическим.
Период затухающих колебаний
больше периода незатухающих колебаний.
Как видно из формулы, при β ® 1, Т ® ¥, движение приближается к апериодическому.
Колебания подвижной системы считаются прекратившимися, если они не превосходят значения [Dj].
Время успокоения затухающих колебаний подвижной системы можно определить по формуле В. О. Арутюнова:

где  — коэффициент, определяющий относительную
— коэффициент, определяющий относительную
точность установки подвижной системы в положение равновесия.