ТЕХНОЛОГИЙ И УПРАВЛЕНИЯ ИМ. К. Г. РАЗУМОВСКОГО
В Г. РОСТОВЕ – НА – ДОНУ
Кафедра «Пищевых технологий и оборудования»
РУКОВОДСТВО ПО ПРОВЕДЕНИЮ
ЛАБОРАТОРНЫХ РАБОТ
ПО ДИСЦИПЛИНЕ
«ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ»
Г. Ростов – на – Дону
Г.
Методическая разработка ориентирована на студентов заочной формы обучения и поэтому содержит значительный объем теоретической информации. Лабораторные работы имеют целью практическое освоение студентами научно-теоретических положений изучаемой дисциплины, овладение ими техникой экспериментальных исследований и анализа полученных результатов, привитие навыков работы с лабораторным оборудованием и вычислительной техникой, представляют отчет и защищают его.
Лабораторные работы могут использоваться при проведении занятий по дисциплине «Моделирование».
Костоглотов А.А., Лазаренко С.В., Ценных Б.М.
СОДЕРЖАНИЕ
| Стр. | |
| Общие теоретические сведения……………………………………………… | |
| Лабораторная работа №1. Исследование динамических характеристик типовых звеньев……………………………………...……………………….. | |
| Лабораторная работа №2. Исследование устойчивости линейной САУ….. | |
| Лабораторная работа №3. Исследование качества процесса управления линейной СУ ………………………………………………………………….. | |
| Лабораторная работа №4. Исследование влияния основных законов управления на динамику линейной СУ….………………………………….. | |
| Лабораторная работа №5. Исследование устойчивости импульсной САУ.. | |
| Список использованных источников..………………………………………. |
Общие теоретические сведения
Развитие химической технологии и других отраслей промышленности, где преобладают непрерывные технологические процессы (нефтехимическая, нефтеперерабатывающая, металлургическая, пищевая и др.) потребовало создания систем управления, получивших название автоматизированных систем управления (АСУ) технологическими процессами (ТП).
АСУ ТП - называют АСУ для выработки и реализации управляющих воздействий на объект управления в соответствии с принятым критерием управления.
Один из этапов проектирования систем управления технологических процессов - выбор структуры системы и расчет оптимальных параметров регуляторов. Любой технологический процесс как объект управления характеризуется следующими основными группами переменных:
1. Переменные, характеризующие состояние процесса. Эти переменные в процессе регулирования необходимо поддерживать на заданном уровне или изменять по заданному закону.
2. Переменные, изменением которых система регулирования может воздействовать на объект с целью управления. Обычно регулирующими воздействиями служат изменения расходов материальных потоков или потоков энергии.
3. Переменные, изменения которых не связаны с воздействием системы регулирования. Эти изменения отражают влияние на управляемый объект внешних условий, изменения характеристик самого объекта и т. п. Их называют возмущающими воздействиями.
Например, для изотермического химического реактора непрерывного действия, регулируемыми переменными являются температура реакционной смеси, состав потока на выходе из аппарата; регулирующими воздействиями могут быть изменение расхода пара в рубашку реактора, изменение расхода катализатора и расхода реакционной смеси; возмущающими воздействиями являются изменения состава сырья, давления греющего пара, причем если давление греющего пара нетрудно измерить, то состав сырья во многих случаях может быть измерен с низкой точностью или недостаточно оперативно.
Анализ технологического процесса как объекта управления предполагает оценку его статических и динамических свойств по каждому из каналов от любого возможного управляющего воздействия к любому возможному регулируемому параметру, а также оценку аналогичных характеристик по каналам связи регулируемых переменных с составляющими вектора возмущений. В ходе такого анализа необходимо выбрать структуру системы регулирования и оценить ее устойчивость.
Лабораторная работа №1
Тема: Исследование динамических характеристик типовых звеньев.
1 Цели занятия:
1. Исследовать влияние изменения параметров передаточной функции на частотные характеристики типовых динамических звеньев.
2. Овладеть техникой экспериментальных исследований и анализа получаемых результатов.
3. Привитие навыков работы с вычислительной техникой.
4. Тренировка в выполнении поставленных задач в составе расчета.
2 Рассматриваемые вопросы
1. Исследование динамических характеристик типовых звеньев.
2. Оформление результатов вычислительного эксперимента.
3 Материальное обеспечение занятия
1. Методическая разработка.
2. Доска, мел, указка.
3. Руководства по выполнению л/р.
4. Лабораторные установки (ЭВМ).
4 Содержание лабораторной работы
1. Подготовка ЭВМ к работе согласно инструкции.
2. Проведение эксперимента:
- исследование колебательного звена;
- исследование форсирующего звена второго порядка;
- исследование форсирующего звена первого порядка;
- исследование апериодического звена;
- обработка результатов эксперимента, формулировка выводов и оформление отчета.
3. Защита отчета.
5 Методические рекомендации по проведению лабораторной работы
5.1 Вводная часть
На вводную часть отводится 10 мин. Во вводной части занятия необходимо довести тему и цель лабораторной работы. Провести инструктаж по мерам и правилам безопасности с росписями каждого студента в журнале инструктажей.
5.2 Основная часть
На основную часть отводится 165 мин.
В начале основной части необходимо провести контрольный опрос студентов по знанию ими теоретических положений по теме занятия (10 мин.). Дать время на ознакомление с теоретическими сведениями, приведенными в п. 7 (10 мин.).
В ходе работы контролировать правильность действий студентов. В случае возникновения вопросов оказывать консультативную помощь, при неисправностях ЭВМ привлекать инженерно-технический персонал лаборатории. На проведение исследований отводится 80 мин.
Особое внимание студентов обращать необходимость наглядного уяснения теоретических положений по принципу действия и режимам работы объекта исследования.
Контроль обработки результатов исследования и оформления отчетов. На него отводится 20 мин. Особое внимание студентов обращать на формулировки выводов по пунктам исследования: это не должна быть простая констатация фактов, а анализ полученных результатов с учетом соответствия теории. На прием отчетов 45 мин.
Прием отчетов заключается в проверке соответствия их нормам из руководства по выполнению лабораторной работы. Кроме того, оценка за лабораторную работу выставляется при наличии правильного и полно оформленного отчета, по результатам оценки ответов на контрольные вопросы, находящиеся в руководстве по выполнению данной работы.
5.3 Заключительная часть
В конце занятия подвести итоги занятия (5 мин):
- напомнить тему и цель занятия;
- довести оценки за входной контроль и полученные за защиту отчетов.
6 Порядок выполнения лабораторной работы студентами
1. Ознакомиться с теоретическими сведениями, приведенными в п. 7.
2. Запустить на ПЭВМ приложение Mathcad.
3. Набрать программу в среде Mathcad в соответствии с п. 8.
4. Провести вычислительный эксперимент по исследованию динамических характеристик типовых звеньев в соответствии с п. 9.
5. Оформить отчет в соответствии с требованиями п. 10.
6. Подготовиться к защите лабораторной работы по контрольным вопросам п. 11.
7 Теоретические сведения
Существует два основных подхода к описанию моделей систем управления:
– в функциональном пространстве;
– в пространстве состояний.
Описание в функциональном пространстве представляет собой математическое (аналитическое, функциональное) представление закона функционирования (поведения) моделируемой системы в форме математической зависимости выходного (управляемого) сигнала от входных сигналов (управления и возмущения). Это – аналог модели «вход-выход».
Описание в пространстве состояний есть представление закона функционирования моделируемой системы в форме последовательности смены состояний системы и выходного сигнала под действием входных сигналов. Это – аналог модели с раскрытой структурой.
Базовым средством описания динамики систем управления является аппарат дифференциальных уравнений. В зависимости от типа описываемой системы это могут быть обыкновенные дифференциальные уравнения, уравнения в частных производных, уравнения с постоянным или переменными коэффициентами и т.д. Этот аппарат достаточно развит и позволяет получать представление закона функционирования системы, из которого можно получить все необходимые характеристики системы.
Однако с ростом порядка дифференциальных уравнений, нелинейности и нестационарности, описываемых ими систем их решение становится все более затруднительным. Поэтому применяются различные способы замены дифференциальных уравнений их упрощенными эквивалентами, позволяющими облегчить процесс преобразования уравнений и получения требуемых характеристик системы.
В функциональном пространстве такими средствами для линейных систем являются преобразования Лапласа и Фурье, передаточные функции и сигнальные графы.
В пространстве состояний существуют матричные эквиваленты названных выше функциональных преобразований.Временные характеристики являются одной из форм представления операторов преобразования переменной f (t) в переменную y (t). Временные характеристики определяются на основе реакции системы на некоторые типовые (тестовые) входные сигналы. В качестве таких сигналов наиболее часто используются ступенчатая единичная функция, дельта-функция Дирака и гармонические сигналы.
Для оценки поведения системы управления в различных режимах, на первый взгляд, необходимо задать на ее входах сложные сигналы управления, обеспечивающие переход системы во все возможные режимы. Недостаток такого решения проблемы обеспечения качества очевиден – это его сложность и неопределенность выбора входного сигнала, обеспечивающего проверку функционирования системы во всех режимах.
Упрощение решения этой задачи состоит в задании на входах системы сигналов, обеспечивающих только наиболее сложные режимы работы системы. Такие сигналы называются тестовыми. Считается, что при успешном функционировании системы в сложных режимах функционирование ее в простых режимах будет обеспечено. Таким образом, качество системы управления оценивается по характеристикам восприятия системой тестовых сигналов.
Типовые тестовые сигналы описываются общим выражением
 , n ≤ 3,
, n ≤ 3,
операторное представление которого в форме преобразования Лапласа имеет вид
 .
.
При этом каждый последующий (с ростом n) сигнал представляет собой интеграл от предыдущего.
Чаще всего используется ступенчатая единичная функция 1 (t):

Рисунок 1 - Графическое представление ступенчатой единичной функции
Для автоматических систем она является распространенным видом входного воздействия. Как правило, подобные воздействия сопровождают процессы включения систем и переходы от одного установившегося состояния к другому. Это основной, наиболее тяжелый в смысле влияния на систему сигнал, при котором исследуются САУ. Реально на систему чаще действуют сигналы, постепенно возрастающие во времени. Следовательно, при удовлетворительной работе системы при единичном сигнале, она будет работать лучше при сигнале, отличном от единичного.
Дельта-функция Дирака d(t)− математическая функция, заданная условиями: d(t) ®¥ при t = 0, и d(t) = 0 при t ≠ 0, - т.е. это импульс бесконечно малой длительности с бесконечной амплитудой, площадь которого принимается равной 1, т.е.


Рисунок 2 - Графическое представление дельта-функции Дирака d(t)
Для автоматических систем эта функция является менее распространенным видом входного воздействия, чем ступенчатая единичная функция. Однако для теоретического описания последних она имеет существенное значение. Подобные воздействия характерны для радарных комплексов, описывают передачу импульса при упругом взаимодействии и т.д. Для этих целей ее можно грубо представить с помощью двух ступенчатых функций:

где N - амплитуда функций,
τ − время, на которое запаздывает вторая ступенчатая функция, при этом N ·τ = 1 и τ ® 0.
Из определений функций 1 (t) и d(t) очевидна связь между ними:
 и
и  .
.
Единичная ступенчатая функция 1 (t) легка для практической реализации с высокой точностью, однако дельта-функцию Дирака d(t) реализовать сложнее.
Среди выше рассмотренных типовых сигналов при теоретическом и экспериментальном исследовании систем автоматического управления важную роль играют функции 1(t) и d (t). Соответствующие им выходные сигналы являются важнейшими временными динамическими характеристиками систем автоматического управления.
Реакция предварительно невозбужденной системы на воздействие в виде единичной ступенчатой функции называется переходной характеристикой системы и обозначается h (t).
Следовательно, если  , то
, то  (рисунок 3).
(рисунок 3).
Реакция предварительно невозбужденной системы на сигнал в виде единичной импульсной функции d (t) называется импульсной переходной характеристикой и обозначается w (t).
Следовательно, если  , то
, то  (рисунок 4).
(рисунок 4).
Переходная и импульсная переходная характеристики могут быть определены экспериментально, если на вход предварительно невозбужденной системы подать воздействие соответственно вида 1(t) или d (t) и зафиксировать на осциллографе процесс на выходе системы. Теоретически эти функции можно определить, решая дифференциальное уравнение системы при соответствующем входном воздействии и нулевых начальных условиях.
 |
Рисунок 3 - Переходная характеристика
 |
Рисунок 4 - Импульсная переходная характеристика
Известно, что
 .
.
Поскольку для линейной системы производной входного сигнала соответствует производная выходного сигнала, то можно записать, что
 ,
,
и, следовательно,  .
.
Таким образом, импульсная переходная функция есть производная от переходной функции системы, т.е. характеризует скорость изменения переходной функции.
Характеристики h (t) и w (t) полностью определяют динамические свойства системы автоматического управления и широко используются при анализе и синтезе систем.
В современной инженерной практике исследования САУ широкое применение получили частотные методы, которые основаны на рассмотрении частотных характеристик отдельных элементов и системы. Если разомкнуть главную обратную связь САУ и подать на вход САУ воздействие синусоидальной формы, то в установившемся режиме на выходе системы получим гармоническую функцию той же частоты, но другой амплитуды и фазы. Анализируя гармонические сигналы на входе и выходе системы, можно установить ее свойства, которые характеризуются частотной функцией  . Функция W (jw) называется комплексной передаточной функцией, комплексной частотной характеристикой. Последняя может быть получена путем замены в выражении передаточной функции комплексной переменной p на jw:
. Функция W (jw) называется комплексной передаточной функцией, комплексной частотной характеристикой. Последняя может быть получена путем замены в выражении передаточной функции комплексной переменной p на jw:
 ,
,
где
 ;
;
 ;
;
 ;
;
 .
.
Указанная замена равносильна переходу к преобразованию Фурье для дифференциальных уравнений при нулевых начальных условиях. Геометрическое место концов векторов комплексной частотной функции  при различных частотах представляет собой частотную характеристику, которая называется амплитудно-фазовой частотной характеристикой САУ (рисунок 5).
при различных частотах представляет собой частотную характеристику, которая называется амплитудно-фазовой частотной характеристикой САУ (рисунок 5).

Рисунок 5 - Амплитудно-фазовая характеристика САУ
Для амплитудно-фазовой характеристики САУ справедливо

или в показательной форме:
 .
.
Члены U (w) и V (w) алгебраической формы записи W (jw) называются соответственно вещественной и мнимой частотными характеристиками. Они определяются освобождением от мнимого числа в знаменателе W (jw), т.е.:
 ;
;
 .
.
Члены A (w) и q (w) показательной формы записи W (jw) называются соответственно амплитудной частотной и фазовой частотной характеристиками и определяются аналитически следующим образом:
 ;
;
 .
.
Очевидно, при изменении w будут изменяться величины и модуля A (w), и аргумента q (w) вектора, изображающего комплексную величину W (jw).

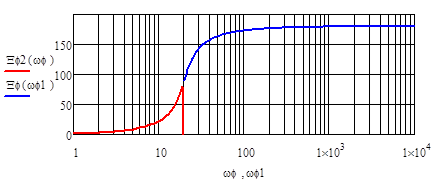
Рисунок 6 - График функции 
Физическая интерпретация A (w) и q (w) устанавливается следующим образом. Если на вход устойчивой динамической системы подать гармоническое воздействие
 ,
,
то по окончании переходного процесса на ее выходе установятся вынужденные колебания с той же частотой w, но с другой амплитудой и фазой:
 ,
,
где y - разность фаз величин x и g. При этом для одной и той же системы разным значениям w соответствуют определенные величины отношений  и y.
и y.
При известных входной и выходной величинах
 .
.
Из сравнения правых частей выражений для W (jw) следует, что
 и
и  .
.
Таким образом, амплитуднаячастотнаяхарактеристикаA (w) является функцией, показывающей изменение отношения амплитуды установившихся вынужденных колебаний на выходе САУ к амплитуде гармонического воздействия на ее входе в зависимости от частоты колебаний входного воздействия.
Фазовойчастотнойхарактеристикойq (w) является функция, показывающая сдвиг по фазе между установившимися колебаниями на выходе и входе САУ при входных гармонических воздействиях в зависимости от частоты колебаний входного воздействия.
Зная амплитуду и частоту гармонического воздействия на входе САУ и ее передаточную функцию (определив по ней W (jw) и A (w), q (w)), можно аналитически определить установившееся вынужденное движение на выходе САУ:
 .
.
Частотные характеристики аналитически получаются из передаточной функции, а значит, как и она, определяют динамические свойства устройства.
В частотном методе анализа широко используется графическое представление W (jw), A (w) и q (w). Построение кривых этих функций можно произвести, вычислив, значения их для различных величин w. Очевидно, такой путь построения графиков частотных характеристик является чрезвычайно трудоемким.
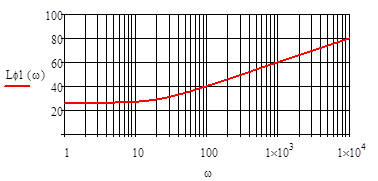
Значительно проще строить и в дальнейшем работать с логарифмическими частотными характеристиками.
Логарифмическая амплитудная характеристика определяется по амплитудной частотной характеристике A (w) следующим образом:

и измеряется в децибелах (дБ).
Например, если  , то
, то  . График L (w) строится в прямоугольной системе координат. По оси абсцисс откладываются значения w в логарифмическом масштабе, а оцифровка делений ведется в значениях w в с-1. За единицу масштаба по оси частот (абсцисс) принимается декада.
. График L (w) строится в прямоугольной системе координат. По оси абсцисс откладываются значения w в логарифмическом масштабе, а оцифровка делений ведется в значениях w в с-1. За единицу масштаба по оси частот (абсцисс) принимается декада.
Декадой называют отрезок на оси абсцисс (частот), соответствующий десятикратному изменению частоты. Значения L (w) в децибелах откладываются по оси ординат. Очевидно, значения L (w), соответствующие  , будут расположены выше оси абсцисс, L (w) для
, будут расположены выше оси абсцисс, L (w) для  – ниже ее, и
– ниже ее, и  при
при  .
.
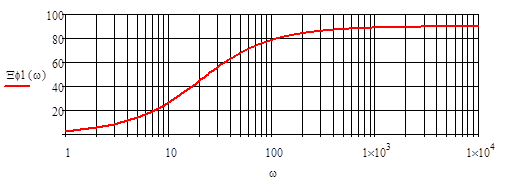
Логарифмическаяфазоваяхарактеристика j (w) отличается от обычной фазовой характеристики q (w) лишь тем, что график ее строится в прямоугольной системе координат, имеющей ту же, что и для L (w), логарифмическую ось частот. По оси ординат откладываются значения  в радианах или градусах.
в радианах или градусах.
Использование логарифмических частотных характеристик L (w) и j (w) обусловлено рядом их преимуществ по сравнению с обычными частотными характеристиками A (w) и q (w). Такими преимуществами являются: меньшая крутизна характеристики L (w), позволяющая аппроксимировать ее небольшим числом прямолинейных отрезков и облегчая ее построение; большая наглядность; возможность замены операции умножения амплитудных частотных характеристик операцией суммирования логарифмических амплитудных частотных характеристик, которая производится сравнительно просто графически и не требует вычислений. Такая возможность проявляется при определении частотных характеристик последовательно соединенных звеньев.
8 Текст программы в среде Mathcad, обеспечивающей исследование динамических характеристик типовых звеньев
8.1 Исследование апериодического звена
 - передаточная функция
- передаточная функция
Введите параметры звена










|

|
8.2 Исследование колебательного звена
 - передаточная функция
- передаточная функция
Введите параметры звена














8.3 Исследование форсирующего звена 1-го порядка
 - передаточная функция
- передаточная функция
Введите параметры звена







 |

8.4 Исследование форсирующего звена 2-го порядка
 - передаточная функция
- передаточная функция
Введите параметры звена








 |
9 Вычислительный эксперимент

1. Изменить значения частотных характеристик исследуемых звеньев на значения, указанные преподавателем.
2. Исследовать
- колебательное звено;
- форсирующее звено второго порядка;
- форсирующее звено первого порядка;
- апериодическое звено.
10 Содержание отчёта
1. Графики частотных характеристик исследуемых звеньев при трёх значениях параметров передаточной функции.
2. Выводы по каждому пункту исследований, в которых необходимо отразить:
- каким образом оказывает влияние изменение коэффициента передачи на вид ЛЧХ, АФЧХ;
- каким образом оказывает влияние изменение постоянной времени Т передаточной функции на вид ЛЧХ, АФЧХ;
- каким образом оказывает влияние изменение дикремента затухания в передаточной функции на вид ЛЧХ, АФЧХ.
11 Контрольные вопросы
1. Что называется АФХ звена?
2. Что называется АЧХ и ФЧХ устройства?
3. Изобразить логарифмические ЧХ дифференцирующего и интегрирующего звеньев.
4. Записать выражение передаточных функций дифференцирующего и интегрирующего звеньев.
5. Как должны изменяться постоянные дифференцирующего и интегрирующего звеньев для того, чтобы расширить частотный диапазон, на котором соответствующие дифференцирующие и интегрирующие свойства контуров проявились бы наилучшим образом?
6. Что называется переходной характеристикой динамического звена?
7. С какой целью проводится коррекция САУ с помощью дифференцирующего и интегрирующего звеньев.
Лабораторная работа №2
Тема: Исследование устойчивости линейной САУ.
1 Цели занятия:
1. Исследовать влияние параметров передаточных функций объекта управления и регулятора на устойчивость системы автоматического управления.
2. Овладеть техникой экспериментальных исследований и анализа получаемых результатов.
3. Привитие навыков работы с вычислительной техникой.
4. Тренировка выполнения поставленных задач в составе расчета.

Рисунок 2.1 - Структурная схема исследуемой САУ
2 Рассматриваемые вопросы
1. Исследование влияние параметров передаточных функций объекта управления и регулятора на устойчивость системы автоматического управления.
2. Оформление результатов вычислительного эксперимента.
3 Материальное обеспечение занятия
1. Методическая разработка.
2. Руководства по выполнению л/р.
3. Лабораторные установки (ЭВМ).
4 Содержание лабораторной работы
1. Подготовка ЭВМ к работе согласно инструкции.
2. Проведение эксперимента:
- исследование влияния параметров передаточной функции регулятора на устойчивость ЛСАУ при устойчивом объекте управления;
- обработка результатов эксперимента, формулировка выводов и оформление отчета. Защита отчета.
5 Методические рекомендации преподавателю по проведению лабораторной работы
5.1 Вводная часть
На вводную часть отводится 10 мин. Во вводной части занятия довести тему и цель лабораторной работы. Провести инструктаж по мерам и правилам безопасности с росписями каждого студента в журнале инструктажей.
5.2 Основная часть
На основную часть отводится 165 мин.
В начале основной части провести контрольный опрос студентов по знанию ими теоретических положений по теме занятия (10 мин.). Дать время на ознакомление с теоретическими сведениями, приведенными в п. 7 (10 мин.).
В ходе работы контролировать правильность действий студентов. В случае возникновения вопросов оказывать консультативную помощь, при неисправностях ЭВМ привлекать инженерно-технический персонал отделения лаборатории. На проведение исследований отводится 80 мин.
Особое внимание студентов обращать необходимость наглядного уяснения теоретических положений по принципу действия и режимам работы объекта исследования.
Контроль обработки результатов исследования и оформления отчетов. На него отводится 20 мин. Особое внимание студентов обращать на формулировки выводов по пунктам исследования: это не должна быть простая констатация фактов, а анализ полученных результатов с учетом соответствия теории. На прием отчетов 45 мин.
Прием отчетов заключается в проверке соответствия их нормам из руководства по выполнению лабораторной работы. Кроме того, оценка за лабораторную работу выставляется при наличии правильного и полно оформленного отчета, по результатам оценки ответов на контрольные вопросы, находящиеся в руководстве по выполнению данной работы.
5.3 Заключительная часть
В конце занятия подвести итоги занятия (5 мин):
- напомнить тему и цель занятия;
- довести оценки за входной контроль и полученные за защиту отчетов.
6 Порядок выполнения лабораторной работы студентами
1. Ознакомиться с теоретическими сведениями, приведенными в п. 7.
2. Запустить на ПЭВМ приложение Mathcad.
3. Набрать программу в среде Mathcad в соответствии с п. 8.
4. Провести вычислительный эксперимент по исследованию влияния параметров передаточных функций объекта управления и регулятора на устойчивость системы автоматического управления (рисунок 1) в соответствии с п. 9.
5. Оформить отчет в соответствии с требованиями п. 10.
6. Подготовиться к защите лабораторной работы по контрольным вопросам п. 11.
7 Теоретические сведения
Важнейшим свойством систем управления является их устойчивость, т.е. вид реакции системы на возмущающие воздействия различного вида, вызывающие отклонения системы от заданного положения или движения.
Объект считается устойчивым, если он после кратковременного внешнего воздействия возвращается в исходное или близкое к нему состояние.
В неустойчивом объекте управляемая координата продолжает меняться по окончании сколь угодно малого входного воздействия.
Нейтральный объект по окончании управляющего воздействия переходит в новое состояние равновесия, зависящее от характера воздействия.
Устойчивость динамической системы определяется аналогичным образом: реакция системы на отклонение или начальные условия может затухать (для устойчивой системы), оставаться неизменной по величине (для нейтральной системы) либо нарастать (для неустойчивой системы), как показано на рисунке 2.

Рисунок 2 - Реакция системы на внешнее воздействие:
устойчивой (а), нейтральной (б) и неустойчивой (в)
Многие реальные системы объективно неустойчивы в разомкнутом состоянии и даже проектируются таковыми. Устойчивость системы обеспечивается с помощью обратной связи, а затем надлежащим выбором параметров регулятора обеспечиваются показатели качества (установившаяся ошибка, величина перерегулирования, время установления выходного сигнала и т.д.). Работоспособной может быть только устойчивая система.
Для устойчивости физически реализуемой системы необходимо и достаточно, чтобы ее весовая функция  удовлетворяла условию
удовлетворяла условию
 ,
,
или, что тоже самое,
 ,
,
где c – некоторая конечная величина, т.е. чтобы выходная реакция системы оставалась ограниченной (величиной c) при ограниченных по абсолютной величине (значением  ,
,  − допустимая величина сигнала ошибки) входных возмущениях. Дифференцируя первое выражение получаем условие устойчивости в виде
− допустимая величина сигнала ошибки) входных возмущениях. Дифференцируя первое выражение получаем условие устойчивости в виде
 .
.
Однако это условие необходимо, но недостаточно. В реальных системах входной сигнал часто является комбинацией своих производных. Такие системы в определенном выше смысле всегда неустойчивы (производная входного сигнала может быть в пределе быть бесконечно большой). Поэтому для них устойчивость определяется с учетом отбрасывания из входного сигнала δ-функции и ее производных.
Частотные характеристики системы управления содержат много информации для определения ее устойчивости. Эти характеристики могут быть получены экспериментально подачей на вход системы синусоидального воздействия и варьирования его частоты.
Для определения устойчивости замкнутой системы можно воспользоваться критерием Найквиста, который основан на анализе частотных характеристик. Удовлетворение этому критерию является необходимым и достаточным условием устойчивости систем с обратной связью. Он оценивает устойчивость замкнутой системы по характеристикам разомкн