Лабораторные работы студенты защищают индивидуально или в составе мини-групп в установленный срок, как правило, на следующем занятии.
Для успешной защиты лабораторной работы необходимо знать цель и ход работы, физическую сущность исследуемых процессов, их теоретическое обоснование, уметь объяснить и анализировать полученные в работе результаты.
При защите лабораторной работы в составе мини-групп каждый студент отвечает на поставленные лично ему вопросы из объема материала, очерченного в разделе «Контрольные вопросы». Как правило, по результатам защиты лабораторной работы выставляется оценка.
Критерии оценки самостоятельной работы
Практическая работа студентов оценивается согласно следующим критериям:
Оценка «5» выставляется студенту, если:
- тематика работы соответствует заданной, студент показывает системные и полные знания и умения по данному вопросу;
- работа оформлена в соответствии с рекомендациями преподавателя;
- объем работы соответствует заданному;
- работа выполнена точно в сроки, указанные преподавателем.
Оценка «4» выставляется студенту, если:
- тематика работы соответствует заданной, студент допускает небольшие неточности или некоторые ошибки в данном вопросе;
- работа оформлена с неточностями в оформлении;
- объем работы соответствует заданному или чуть меньше;
- работа сдана в сроки, указанные преподавателем, или позже, но не более, чем на 1-2 дня.
Оценка «3» выставляется студенту, если:
- тематика работы соответствует заданной, но в работе отсутствуют значительные элементы по содержанию работы или тематика изложена нелогично, не четко представлено основное содержание вопроса;
- работа оформлена с ошибками в оформлении;
- объем работы значительно меньше заданного;
- работа сдана с опозданием в сроках на 5-6 дней.
Оценка «2» выставляется студенту, если:
- не раскрыта основная тема работы;
- работа оформлена не в соответствии с требованиями преподавателя;
- объем работы не соответствует заданному;
- работа сдана с опозданием в сроках больше 7 дней.
Источники, рекомендуемые для выполнения лабораторных работ
Литература:
1. Шишмарев В.Ю. Автоматика: учебник для студентов СПО. М.: Издательский центр «Академия», 2008г-288с.
2.Киреева З.А. Релейная защита и автоматика электроэнергетических систем М. Издательский центр «Академия», 2013г-288с.
Интернет–ресурсы:
www.uralenergo.ru;
www.cortem.ru;
www.electroshield.ru;
www.inventunion/ru;
www.altor-ufa.ru.
.
Список лабораторных работ
По ПМ.01 МДК.01.04 Тема 4.1 «Автоматика»
Лабораторная работа № 1. Исследование индуктивного датчика
Лабораторная работа № 2. Исследование потенциометрических датчиков угловых и линейных перемещений
Лабораторная работа № 3. Исследование электромагнитных реле постоянного тока
Лабораторная работа № 4. Исследование электромашинного усилителя с поперечным полем
Лабораторная работа № 5. Исследование вращающегося трансформатора
Лабораторная работа № 6. Исследование следящего привода
Лабораторная работа № 1
Тема: Индуктивный датчик
Цель работы: изучение принципа действия, конструктивного исполнения, области применения индуктивных датчиков, приобретение практических навыков по снятию статических характеристик и определению их чувствительности.
Теоретическая часть
Индуктивные датчики относятся к группе параметрических датчиков, сопротивление которых имеет индуктивный характер. Конструктивно они представляют собой электромагнитный дроссель, индуктивность которого меняется в зависимости от перемещения одной из подвижных деталей дросселя (якоря).
Индуктивность дросселя
 ,
,
где
 −магнитное сопротивление воздушного зазора;
−магнитное сопротивление воздушного зазора;
 −магнитное сопротивление материала сердечника и якоря;
−магнитное сопротивление материала сердечника и якоря;
L – индуктивность;
W − число витков обмотки;
l0, S0 − общая длина и площадь сечения воздушного зазора;
l, S − длина средней силовой линии площадь сечения сердечника магнитопровода;
 ,
,  − магнитная проницаемость воздуха и материала сердечника.
− магнитная проницаемость воздуха и материала сердечника.

Рис. 1. Схема нереверсивного индуктивного датчика
Выходное напряжение индуктивного датчика (для случая активной нагрузки):
 ,
,
где
Uвых − выходное напряжение индуктивного датчика;
Iн − ток нагрузки;
Rн − сопротивление нагрузки;
R − активное сопротивление катушки индуктивности;
Uп − питающее напряжение;
ω − частота питающего напряжения;
L − индуктивность катушки с сердечником.
Пренебрегая активным сопротивлением и магнитным сопротивлением железа и считая S = S0, получим:  и
и  или
или  ,
,
где
 −входная величина (2
−входная величина (2  − общая длина воздушного зазора);
− общая длина воздушного зазора);
 −крутизна статической характеристики датчика.
−крутизна статической характеристики датчика.

Рис. 2 Статическая характеристика нереверсивного индуктивного датчика
Расхождение реальной и расчётной характеристик на начальном участке объясняется пренебрежением магнитным сопротивлением магнитопровода, а на конечном участке характеристики − активным сопротивлением катушки и сопротивлением нагрузки.
Достоинства: высокая чувствительность, надёжность, мощный выходной сигнал.
Недостатки: нелинейность статической характеристики, большие электромагнитные усилия на якоре, наличие нулевого выходного сигнала, зависимость крутизны статической характеристики от частоты и напряжения питания.

Рис. 3 Дифференциальная схема включения индуктивного датчика
Недостатком дифференциального датчика является необходимость наличия двух источников питания, что обеспечивается разделительным трансформатором.

Рис. 4 Мостовая схема включения индуктивного датчика
Мостовые схемы менее экономичны из-за потерь в балластных сопротивлениях и поэтому применяются для маломощных датчиков. Фаза Uвых меняется в функции от направления перемещения, крутизна статической характеристики в 2 раза выше.
Преимущества реверсивных датчиков: большая чувствительность, усилия на якорь частично компенсируются, большая линейность статической характеристики, меньшая зависимость от температуры и изменения питания, меньшая величина Uп, меньшая зависимость от частоты питания.
 ,
,
где
Uвыхх − напряжение холостого хода;
Zвых − сопротивление схемы со стороны выхода (выходное сопротивление);
Zн − сопротивление нагрузки.
Максимум активной мощности в нагрузке Zн будет при Rн = Rвых, Xн = Xвых
Достоинства индуктивных датчиков: бесконтактность, надёжность, высокая чувствительность, высокая разрешающая способность.
Недостатки индуктивных датчиков: техническая сложность регулирования (балансировки) датчика, наличие напряжения небаланса, при Xвх = 0 за счёт неполной симметрии схемы, резкое снижение чувствительности с увеличением Xвх, зависимость Uвых от частоты питания, работа лишь на переменном токе.
Ход работы
Собрать электрическую схему установки и предъявить ее преподавателю.
Включить питание на лабораторную установку.
Произвести балансировку мостовой схемы. С этой целью перемещением потенциометра R и сферического шарика добиться установки показаний вольтметра на нуль. Изменение фазы выходного сигнала при переходе поплавка через нуль наблюдать на экране осциллографа.
Снять статическую характеристику  при холостом ходе.
при холостом ходе.
Снять статическую характеристику  при включенной с помощью ключа S1 нагрузке Rн.
при включенной с помощью ключа S1 нагрузке Rн.
Результаты наблюдений занести в таблицы, на основании которых построить статические характеристики на одном графике.
Составить отчет.
Контрольные вопросы
Каково устройство и принцип действия индуктивного датчика, его достоинства и недостатки?
Начертить принципиальную электрическую схему однотактного индуктивного датчика.
От каких конструктивных особенностей зависит:
- линейность статической характеристики;
- чувствительность;
- выходная мощность индуктивного датчика?
Каким функциональным элементом является индуктивный датчик в системах автоматического регулирования?
Как влияет сопротивление нагрузки на чувствительность и линейность статической характеристики датчика?
В каких системах автоматического регулирования применяется данный датчик?
Какие функциональные элементы являются нагрузкой для индуктивного датчика в системах автоматического регулирован
Лабораторная работа № 2
Тема: Потенциометрические датчики
Цель работы: Исследование устройства и принципа действия потенциометрических датчиков угловых и линейных перемещений
Теоретическая часть
Электромеханическое устройство, состоящее из активного сопротивления и скользящего по нему контакта – щетки (подвижного контакта), представляет собой реостат. Реостат может служить датчиком углового и линейного перемещений (рис.1.1) и относится к группе параметрических датчиков.

Рис.1.1. Реостатная схема датчика линейного (углового) перемещения.
Однако чаще всего реостат включают по схеме делителя напряжения (рис.1.2) и называют его в этом случае потенциометрическим датчиком или потенциометром.
Такой потенциометр можно отнести к группе параметрических датчиков, у которых в зависимости от входной величины Х кроме сопротивления датчика  меняется и сопротивление нагрузки
меняется и сопротивление нагрузки  .
.

Рис.1.2. Потенциометрический датчик.
При этом  ,
,
где  – сопротивление между началом потенциометра и щеткой;
– сопротивление между началом потенциометра и щеткой;
 – сопротивление между концом потенциометра и щеткой;
– сопротивление между концом потенциометра и щеткой;
 – сопротивление потенциометра.
– сопротивление потенциометра.
Потенциометрические датчики классифицируются:
по диапазону перемещения подвижного контакта:
а) с ограниченным перемещением;
б) с неограниченным (более 360°) перемещением (спиральные винтовые потенциометры);
по характеру намотки:
а) ламельные;
б) проволочные;
в) пленочные;
по способу включения:
а) реостатные;
б) ненагруженные и нагруженные делители;
по характеру воспроизведения функций:
а) линейные;
б) функциональные.
По точности воспроизведения сигнала в зависимости от разброса сопротивления  и ошибке по линейности статической характеристики потенциометрические датчики делятся на три класса точности (1-й класс наиболее точный).
и ошибке по линейности статической характеристики потенциометрические датчики делятся на три класса точности (1-й класс наиболее точный).
Основными эксплуатационными характеристиками потенциометров являются:
статическая характеристика и статическая чувствительность;
номинальная величина активного сопротивления;
номинальная мощность рассеивания;
уровень собственных шумов;
износоустойчивость и вибропрочность;
стабильность величины сопротивления.
Статическая характеристика определяет функциональную зависимость выходного напряжения потенциометра от перемещения его движка (для установившегося процесса).
Статическая чувствительность характеризуется крутизной статической характеристики и определяется как приращение напряжения на единицу линейного или углового перемещения щетки.
Номинальная величина активного сопротивления характеризуется значением активного сопротивления, полученного после изготовления потенциометра.
Номинальная мощность рассеивания определяется максимально допустимой мощностью, длительно рассеиваемой на сопротивлении потенциометра без нарушения его нормальной работы.
Уровень собственных шумов оценивают по величине ложного сигнала, появляющегося на выходе потенциометра вследствие мгновенных нарушений контакта, возникающих при больших скоростях перемещения или вибрации щетки.
Износоустойчивость определяется числом перемещений движка до нарушения нормальной работы потенциометра.
Вибропрочность оценивается временем, в течение которого потенциометр выдерживает колебания с заданным ускорением в заданном диапазоне частот.
Расчет потенциометра обычно сводится к определению статической характеристики и температурного режима обмотки.
Статическая характеристика ненагруженного потенциометра (согласно ранее данному определению) будет линейна (рис.1.3, прямая 1) и выразится в виде зависимости
 (1.1)
(1.1)
или в относительных единицах
 ,
,
где  - напряжение на выходе потенциометрического датчика при
- напряжение на выходе потенциометрического датчика при  ;
;
X – величина перемещения подвижного контакта (щетки) потенциометрического датчика;
 - чувствительность потенциометрического датчика;
- чувствительность потенциометрического датчика;
 - напряжение питания потенциометрического датчика;
- напряжение питания потенциометрического датчика;
L - длина потенциометрического датчика;
 - относительное перемещение щетки потенциометрического датчика.
- относительное перемещение щетки потенциометрического датчика.
Однако в реальных условиях потенциометрический датчик нагружен входным сопротивлением последующего звена системы автоматического управления, которое будем считать нагрузкой потенциометрического датчика и обозначать  .
.

Рис.1.3. Статические характеристики потенциометрического датчика в относительных единицах при разных  .
.
Схема включения нагруженного потенциометра показана на рис.1.4.

Рис.1.4. Схема нагруженного потенциометрического датчика.
Нагрузка  потенциометрического датчика оказывает шунтирующее действие сопротивлению
потенциометрического датчика оказывает шунтирующее действие сопротивлению  и поэтому влияет на выходное напряжение. Таким образом, подключение нагрузочного сопротивления к выходу потенциометра влияет на величину выходного напряжения и вызывает ошибку-погрешность, величина которой выражается в абсолютных или относительных единицах.
и поэтому влияет на выходное напряжение. Таким образом, подключение нагрузочного сопротивления к выходу потенциометра влияет на величину выходного напряжения и вызывает ошибку-погрешность, величина которой выражается в абсолютных или относительных единицах.
Величина этой ошибки зависит от отношения  и она тем больше, чем больше это отношение (рис.1.3).
и она тем больше, чем больше это отношение (рис.1.3).
Для случая  (рис.1.4)
(рис.1.4)
 , (1.2)
, (1.2)
 , (1.3)
, (1.3)
где  ,
,  ,
,  . (1.4) – (1.6)
. (1.4) – (1.6)
Подставляя выражения (1.5) и (1.6) в выражение (1.3), получим
 . (1.7)
. (1.7)
Из выражения (1.2) с учетом (1.7) и (1.4) можно получить
 . (1.8)
. (1.8)
Так как  , то выражение (1.8) можно записать в виде
, то выражение (1.8) можно записать в виде

или
 . (1.9)
. (1.9)
Выражение (1.9) для статической характеристики потенциометрического датчика преобразуется к виду
 (1.10)
(1.10)
или в относительных единицах
 . (1.11)
. (1.11)
Статическая характеристика нагруженного потенциометрического датчика для различных значений приведена на рис.1.3 (кривые 2 и 3).
При  отношение
отношение  , тогда
, тогда  и выражение (1.11) преобразуется в выражение (1.1) для ненагруженного потенциометра.
и выражение (1.11) преобразуется в выражение (1.1) для ненагруженного потенциометра.
Абсолютная ошибка влияния нагрузки будет
 ,
,
а относительная
 . (1.12)
. (1.12)
С учетом выражений (1.1) и (1.10) относительная ошибка выразится
 (1.13)
(1.13)
или
 . (1.14)
. (1.14)
На рис.1.5 приведены графические зависимости относительных ошибок потенциометрических датчиков при различных  в зависимости от относительного перемещения его щетки (схема на рис.1.4).
в зависимости от относительного перемещения его щетки (схема на рис.1.4).
Значение Х, при котором ошибка максимальная, определяется из уравнения

и с учетом выражения (1.14) равно  . При этом максимальная ошибка согласно выражению (1.14) при
. При этом максимальная ошибка согласно выражению (1.14) при  будет равна
будет равна 

Рис.1.5. Графические зависимости относительных ошибок потенциометрического датчика для различных  .
.
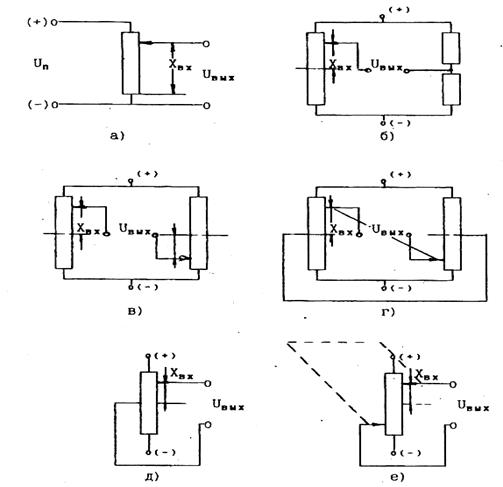
Существуют различные схемы включения потенциометрических датчиков. Некоторые схемы включения потенциометрических датчиков приведены на рис.1.6,а, б, в, г, д, е.
Одним из основных недостатков потенциометрических датчиков является их сравнительно низкая надежность, которая проявляется в обрыве обмотки, потере контакта щетки и коротком замыкании витков обмотки на определенных ее участках.
Применение метода резервирования для повышения надежности потенциометрических датчиков не всегда эффективно и связано с повышением габаритов, веса, стоимости и т.д. Этих недостатков можно в значительной мере избежать, если применить метод равнопотенциальных соединений.
|
Рис.1.6. Схемы включения потенциометрических датчиков:
а – нереверсивная схема включения;
б, в, г, д, е – реверсивные схемы включения.
Этот метод основан на том, что резервированный узел заменяется параллельно работающими элементами (обычно двумя), каждый из которых разбит на участки так, чтобы можно было осуществить соединения точек деления одного с соответствующими точками равного потенциала другого элемента.
Число равнопотенциальных соединений выбирается таким образом, чтобы отклонение выходного параметра от минимального значения в случае отказа было такое же, что и при отказе элемента в резервированном узле при обычном поэлементном резервировании.
Преимущества метода равнопотенциальных соединений можно рассмотреть на примере двух параллельно включенных потенциометров для случая обрыва обмотки одного из них, если при этом оценку безопасности работы вести по отклонению значения выходного напряжения от его номинального значения.
На рис.1.7,а приведена одна из широко применяемых схем включения двух потенциометров, где заземлены средние точки потенциометров и источника питания; на рис.1.7,б – схема включения тех же потенциометров, но с введенными равнопотенциальными соединениями.
В схемах приняты следующие обозначения:
 – напряжение питания потенциометров;
– напряжение питания потенциометров;  и
и  – соответственно сопротивление и длина обмотки потенциометра;
– соответственно сопротивление и длина обмотки потенциометра;  – сопротивление нагрузки;
– сопротивление нагрузки;  – напряжение на сопротивлении нагрузки;
– напряжение на сопротивлении нагрузки;  – линейное перемещение движка потенциометра относительно среднего (нулевого) положения; а – точка обрыва одного из потенциометров.
– линейное перемещение движка потенциометра относительно среднего (нулевого) положения; а – точка обрыва одного из потенциометров.

Рис.1.7. Схемы включения двух потенциометров:
а) с заземлением средних точек потенциометров и источника питания;
б) с введенными равнопотенциальными соединениями.
На рис.1.8 показаны зависимости  , приведенные к единичному напряжению питания.
, приведенные к единичному напряжению питания.

Рис.1.8. Зависимости  , приведенные к единичному напряжению питания для схем на рис.1.7.
, приведенные к единичному напряжению питания для схем на рис.1.7.
Здесь цифрами обозначены:
1 – зависимость выходного напряжения от перемещения движка потенциометра; 2, 3 – зависимости выходного напряжения от перемещения движка потенциометра в случае обрыва одного из потенциометров в точке, а соответственно для схем, изображенных на рис.1.7,а и 1.7,б.
Характеристики 1, 2, 3 приводятся для случая, когда абсцисса точки обрыва  , а число введенных равнопотенциальных связей равно 8.
, а число введенных равнопотенциальных связей равно 8.
На рис.1.9,а показана схема включения потенциометра с заземленной средней точкой, а на рис.1.9,б – схема того же потенциометра с соответствующими равнопотенциальными точками, полученными с помощью последовательно включенной цепочки сопротивлений R.
|
Рис.1.9. Схемы включения потенциометра:
а) – с заземленной средней точкой;
б) – с применением соединений его точек с соответствующими равнопотенциальными точками, полученными с помощью последовательно включенной цепочки сопротивлений.
На рис.1.10 даны зависимости  , приведенные к единичному напряжению источника питания для схем, изображенных на рис.1.9 (
, приведенные к единичному напряжению источника питания для схем, изображенных на рис.1.9 ( );
);  – абсцисса точки обрыва; число введенных равнопотенциальных соединений - 4.
– абсцисса точки обрыва; число введенных равнопотенциальных соединений - 4.
Как и на рис.1.8, цифрой 1 обозначена зависимость выходного напряжения от перемещения движка потенциометра, а 2, 3 – зависимости выходного напряжения от перемещения движка для случая обрыва потенциометра в точке, а соответственно для схем включения на рис.1.9,а и 1.9,б.
Необходимо отметить, что повышение надежности потенциометра, включенного по схеме, показанной на рис 1.9,б, имеет место при условии, что надежность цепочки последовательно включенных сопротивлений значительно выше, чем самого потенциометра.
Анализ проведенных характеристик позволяет отметить, что метод равнопотенциальных соединений обеспечивает значительное повышение надежности.

Рис.1.10. Зависимости  , приведенные к единичному напряжению питания для схем на рис.1.9.
, приведенные к единичному напряжению питания для схем на рис.1.9.
С конструкцией потенциометрических датчиков можно ознакомиться в лаборатории при выполнении работы по имеющимся в ней стендам.
Обычно потенциометрические датчики являются пропорциональным звеном.
Достоинства: потенциометрические датчики обеспечивают высокую точность и стабильность характеристик, конструктивно просты, имеют малый вес и габариты, допускают питание постоянным и переменным током.

|
Рис. 1.11 Схемы потенциометрических датчиков.
Недостатки: наличие скользящего контакта, сравнительно большой порог чувствительности и невысокая чувствительность ( В/мм), а также невысокая надежность.
В/мм), а также невысокая надежность.
Ход работы:
Контрольные вопросы:
1.Назначение и особенности схем включения потенциометрических датчиков.
2. Получите аналитические выражения для статических характеристик простейших схем ненагруженного и нагруженного потенциометрического датчика.
3. Определите аналитически и получите графически абсолютную и относительную ошибки потенциометрических датчиков.
4. Назовите основные отказы потенциометрических датчиков и укажите методы повышения их надежности.
5. Рассмотрите метод равнопотенциальных соединений для повышения надежности потенциометрических датчиков.
6. Назовите достоинства и недостатки потенциометрических датчиков.
Лабораторная работа № 3
Тема: Электромагнитные реле постоянного тока
Цель работы: исследование временных характеристик реле и схем измерения времени срабатывания и отпускания
Теоретическая часть
Реле — электромеханическое устройство, предназначенное для коммутации электрических цепей, цепей сигнализации и управления. Чаще всего реле используется в системах управления и зачастую являются как коммутационными, так и усиливающими элементами цепи.
 Следует помнить, что по характеру включения сеть устройства могут быть первичными и вторичными. Первичные реле включаются непосредственно в управляющие цепи управления, вторичные подключаются через измерительные трансформаторы, лабораторные резисторы, шунтирующие сопротивления.
Следует помнить, что по характеру включения сеть устройства могут быть первичными и вторичными. Первичные реле включаются непосредственно в управляющие цепи управления, вторичные подключаются через измерительные трансформаторы, лабораторные резисторы, шунтирующие сопротивления.
Также одним из достоинств релейных устройств и элементов является очень высокое сопротивление между открытыми контактами, что выгодно отличает их твердотелых реле, использующих вместо катушки полупроводниковые элементы.
Твердотельные устройства очень чувствительны к качеству управляющего сигнала и имеют высокую вероятность ложного срабатывание в результате внештатного электромагнитного импульса или при увеличении напряжения в управляемой сети сверх оптимальных значений.
Помимо стандартных электромагнитных реле некоторые источники относят к этой группе устройств и герконовые реле, главной отличительной чертой которых является использование, в качестве управляющего сигнала, вместо электрического сигнала магнитное поле вырабатываемое постоянным или электромагнитом.
Устройство и принцип действия электромагнитного реле
Конструктивно электромагнитное реле представляет собой катушку выполняющую роль втягивающего устройства. Она состоит из основания из немагнитного материала, на которое намотан медный провод, который, в зависимости от исполнения, может быть в изоляции из тканевых, синтетических материалов, но в большинстве случаев проводник покрывается диэлектрическим лаком.
При подаче напряжения на катушку происходит втягивание металлического сердечника, связанного с толкателем, который приводит в движение контакты.
В зависимости от назначения контактный блок реле может состоять из нормально открытых (разомкнутых) или нормально закрытых (замкнутых) контактов, в некоторых случаях блок контактов может совмещать в себе оба типа контактов.
Более подробно устройство реле можно понять если разбить его составляющие на блоки:
Управляющий — служит для преобразования управляющего сигнала (в нашем случае из электрического — в магнитное поле);
Блок промежуточных элементов — приводит в действие исполнительный механизм;
Исполнительный блок — воздействует непосредственно на управляемую цепь. В качестве исполнительного блока можно рассматривать контактную группу устройства.
Также, при проектировании управляющих цепей с использованием электромагнитных реле необходимо учитывать, что ввиду того что чувствительным элементом является электромагнитная катушка, то ток в обмотке увеличивается или уменьшается не мгновенно, а в течении некоторого времени.
В связи с этим следует учитывать возможное время задержки срабатывания. Оно достаточно мало, но в некоторых ситуациях может оказывать влияние на работу других элементов схемы.
Электромагнитные реле можно классифицировать по следующим признакам:
Области применения:
Для цепей управления, защиты или сигнализации;
Мощности управления:
Малой мощности, управляющий сигнал ≤1 Вт, средней мощности, сигнал управления находится в пределах от 1 до 9 Вт, высокой мощности - мощность сигнала ≥10 Вт;
Времени реакции на сигнал управления:
Безынерционные время реакции ≤ 0,001 сек., быстродействующие — время реакции от 0,001 до 0,05 сек., замедленные время реакции от 0,05 до 1 сек., а также реле времени с регулируемой задержкой срабатывания.
Характеру управляющего напряжения:
Постоянного тока —нейтральные, поляризованные и переменного тока.
Отдельно стоит остановиться на особенностях реле постоянного тока. Как было выше сказано они подразделяются на нейтральные и поляризационные. Главное отличие этих двух групп заключается в том, что поляризационные устройства чувствительны к полярности приложенного напряжения, то есть подвижный сердечник меняет свое направление с правого на левое или наоборот в зависимости от полярности напряжения.
Электромагнитные реле постоянного тока делятся на:
Двухпозиционные;
Двухпозиционные с преобладанием;
Трехпозиционные или реле с нечувствительной зоной.
Срабатывание же устройств нейтрального типа не зависит от полярности подаваемого напряжения. К недостаткам реле использующих, в качестве управляющего сигнала, постоянный ток можно отнести необходимость установки блоков питания, для подачи постоянного тока и высокая стоимость самого устройства.
Реле переменного тока этого лишены, но и у них есть свои недостатки такие как — необходимость доработки конструкции для устранения вибрации сердечника. Рабочие параметры хуже, чем у устройств использующих линейную форму управляющего сигнала, а именно — хуже чувствительность, гораздо меньшее электрическое усилие. Но в тоже время они могут напрямую подключаться к электрической сети переменного тока.
Характеристики реле.
Основными характеристиками реле являются:
Рабочее напряжение;
Ток срабатывания;
Сопротивление обмотки;
Характер и число контактных групп;
Время срабатывания и отпускания;
Коэффициент возврата;
Величина тягового усилия;
Тип магнитной системы.
Динамика реле характеризуется временной характеристикой (рис.2),(σ - зазор между якорями и сердечниками электромагнита).
На участке О-А переходный процесс описывается уравнением


тогда  , где
, где 
Трогание якоря наступает в момент, когда  ,т.е.
,т.е.

На участке О-В происходит изменение магнитной проводимости зазора, в исходном уравнении появляется дополнительный член
Так как  >0, то составляющие
>0, то составляющие  , по сравнению с участком О-а, начинают уменьшаться, чем и объясняется провал на временной характеристике.
, по сравнению с участком О-а, начинают уменьшаться, чем и объясняется провал на временной характеристике.
 ,
,
где  - соответственное тяговое усилие и усилие пружины.
- соответственное тяговое усилие и усилие пружины.

На участке в-с после перемещения якоря индуктивность постоянна  ,
,
где  - индуктивность при притянутом якоре.
- индуктивность при притянутом якоре.
Отпускание якоря реле может быть вызвано либо отключением напряжения питания от обмотки, либо замыканием этой обмотки накоротко или через дополнительное сопротивление.
В первом случае ток в обмотке практически мгновенно уменьшается от  до нуля. Однако при этом наводится значительная ЭДС самоиндукции
до нуля. Однако при этом наводится значительная ЭДС самоиндукции  , В результате чего может произойти пробой изоляции проводников обмотки. Поэтому, как правило, реле постоянного тока шунтируется диодом, включенным встречно с источником питания (рис.3). В результате этого режим отпускания соответствует закорачиванию обмотки реле накоротко. Тогда ток изменяется по экспоненте
, В результате чего может произойти пробой изоляции проводников обмотки. Поэтому, как правило, реле постоянного тока шунтируется диодом, включенным встречно с источником питания (рис.3). В результате этого режим отпускания соответствует закорачиванию обмотки реле накоротко. Тогда ток изменяется по экспоненте 
В момент времени (участок d-e), когда тяговое усилие становится меньше противодействующих сил, начинается движение якоря. Время трогания  при размыкании определяется
при размыкании определяется

Время движения  определяется сложной зависимостью и является функцией многих параметров.
определяется сложной зависимостью и является функцией многих параметров.
Способы изменения времени срабатывания и отпускания реле.
Различают конструктивные и схемные способы изменения времени срабатывания и отпускания. Первый способ предполагает снижение массы подвижных частей или уменьшение потерь на вихревые токи.
Рассмотрим схемные методы ускорения срабатывания реле (см. рис.3б,в). На рис.3 кривая 1 характеризует переходный процесс в обмотке реле без принудительного ускорения срабатывания реле. Включение последовательно с обмоткой реле добавочного активного сопротивления  (рис.3б) приводит к уменьшению постоянной времени цепи, т.е. к уменьшению времени срабатывания (кривая 2), так как
(рис.3б) приводит к уменьшению постоянной времени цепи, т.е. к уменьшению времени срабатывания (кривая 2), так как  .
.
Ещё большее быстродействие (в 5-10 раз) можно получить, включив параллельно  форсирующую ёмкость С, так как сопротивление конденсатора
форсирующую ёмкость С, так как сопротивление конденсатора  значительно меньше
значительно меньше  . Зарядный ток конденсатора резко увеличивается до значительной величины, поэтому ток в обмотке реле быстрее достигает значения тока срабатывания и следовательно,
. Зарядный ток конденсатора резко увеличивается до значительной величины, поэтому ток в обмотке реле быстрее достигает значения тока срабатывания и следовательно,  становится меньше (кривая 3). За малое время этот ток не успевает перегреть обмотку реле. Для сохранения величины установившегося тока
становится меньше (кривая 3). За малое время этот ток не успевает перегреть обмотку реле. Для сохранения величины установившегося тока  необходимо увеличить напряжение питания на величину
необходимо увеличить напряжение питания на величину 

Способы замедления срабатывания иллюстрируются рис.4. В схеме, приведенной на рис.4а, замедление срабатывания достигается включением конденсатора С параллельно обмотке. При замыкании цепи источника питания ток проходит сначала через С в обход