Многообразие производственных процессов обусловливает различные виды и характеры движения рабочих органов машины, а следовательно, и электроприводов.
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т. п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические двигатели и др.).
По степени управляемости электропривод может быть:
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый – для сообщения изменяемой или неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый – управляемый в соответствии с заданной программой;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
2.3 Основы механики электропривода
Самая простейшая механическая система, состоящая из ротора двигателя и непосредственно связанной с ним нагрузки – рабочего органа машины представлена рис. 2.2. Несмотря на простоту, система вполне реальна: именно так реализована механическая часть ряда насосов, вентиляторов, многих других машин.
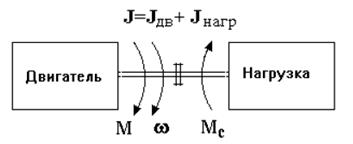
Рисунок 2.2 – Модель механической части
К системе на рис. 2.2 приложены два момента – электромагнитный момент М, развиваемый двигателем, и момент Мс, создаваемый нагрузкой, а также потерями механической части (трение); каждый момент имеет свою величину и направление. Движение системы определяется вторым законом Ньютона:
 (2.1)
(2.1)
где ω – угловая скорость,
J – суммарный момент инерции.
Правая часть уравнения (2.1) – динамический момент

Он возникает, если алгебраическая сумма моментов М и Мс отлична от нуля; величина и знак динамического момента определяют ускорение.
Режимы, при которых ∑M = 0, т. е. моменты М и Мс равны по величине и противоположно направлены, называют установившимися или статическими, им соответствует ω = const, в том числе ω= 0.
Режимы, когда ∑M ≠ 0, называют переходными или динамическими (ускорение, замедление).
В уравнении (2.1) момент Мс практически полностью определяется свойствами нагрузки, а момент М, который можно принять за независимую переменную, формируется двигателем. Скорость ω – зависимая переменная; ω(t) определяется в динамических режимах решением (2.1) для любых конкретных условий, а в статических режимах находится из условия:
 (2.2)
(2.2)
2.4 Электроприводы постоянного тока
Для получения простейшей модели электропривода постоянного тока, описывающей установившиеся (статические) режимы и позволяющей получить основные характеристики, воспользуемся схемой на рис. 2.3.
Якорная цепь питается от независимого источника с напряжением U, сопротивление цепи якоря R постоянно, магнитный поток Ф определяется лишь током возбуждения и не зависит от нагрузки (реакция якоря не проявляется), индуктивные параметры цепей пока не учитываются, поскольку рассматриваются лишь установившиеся (статические) режимы.

Рисунок 2.3 – Схема электропривода с двигателем постоянного тока
Взаимодействие тока I в обмотке якоря с магнитным потоком Ф, создаваемым обмотками, расположенными на полюсах машины, приводит в соответствии с законом Ампера и возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитного момента М:
 (2.3)
(2.3)
где k – конструктивный параметр машины.
В движущихся с угловой скоростью ω в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения Е:
 (2.4)
(2.4)
направленная в рассматриваемом случае встречно по отношению к вызвавшей движение причине – ЭДС источника питания U.
В соответствие со вторым законом Кирхгоффа для якорной цепи машины справедливо уравнение:
 (2.5)
(2.5)
Уравнения (2.3) – (2.5) – простейшая, но достаточная для понимания главных процессов в электроприводе постоянного тока модель. Для решения практических задач они должны быть дополнены уравнением движения с моментом потерь ∆M, входящим в Мс:
 (2.6)
(2.6)
и уравнениями цепи возбуждения для конкретной схемы электропривода.
Если существовал некоторый установившийся режим М1 = Мс1, а затем Мс изменился, например, возрос до величины Мс2, то для получения нового установившегося режима необходимо иметь средство, которое изменило бы М, приведя его в соответствие с новым значением Мс. В двигателе внутреннего сгорания эту роль выполнит оператор, увеличив подачу топлива; в паровой турбине – специальный регулятор, который увеличит подачу пара. В электрической машине эту роль выполнит ЭДС. Действительно, при возрастании Мс скорость двигателя начнет снижаться, значит уменьшится и ЭДС (полагаем для простоты, что Ф, а также U и R – постоянные). Из (2.5) следует, что:
 (2.7)
(2.7)
Следовательно, ток вырастет, обусловив тем самым рост момента в соответствии с (2.3). Двигатель автоматически, без каких-либо внешних воздействий перейдет в новое установившееся состояние. Эти процессы будут иметь место при любых величинах и знаках Мс, т. е. ЭДС будет выполнять функцию регулятора как в двигательном, так и в тормозных режимах работы машины.