Как отмечалось выше, основная функция электропривода состоит в управлении его координатами – скоростью и моментом, т. е. в их принудительном направленном изменении в соответствии с требованиями технологического обслуживаемого процесса.
Очень важный частный случай управления координатами – регулирование скорости или момента, т. е. принудительное изменение этих величин в установившемся режиме в соответствии с требованиями технологического процесса посредством воздействия на механическую характеристику двигателя. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты.
Чаще всего регулируемой координатой служит скорость: необходимо изменять скорость транспортного средства в зависимости от условий движения, состояния дороги и т. п., нужно регулировать скорость насоса, чтобы обеспечивать нужный напор в системе водоснабжения, требуется поддерживать на заданном уровне скорость движения жилы кабеля в процессе наложения на нее изоляции и т. п.
Понятие “регулирование скорости”, когда используются разные характеристики (рис. 2.5, а), не следует смешивать с изменением скорости, даже значительным, которое вызывается ростом или снижением нагрузки и происходит в соответствии с формой данной механической характеристики (рис. 2.5, б).
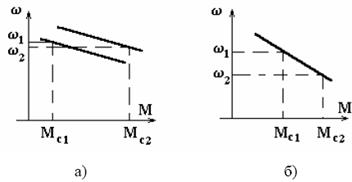
Рисунок 2.5 – Регулирование (а) и изменение (б) скорости
В ряде случаев оказывается необходимым регулирование момента. Оно потребуется, например, если нужно качественно укладывать на катушку проволоку, получаемую с волочильного стана, если при буксировке судна на больших волнах надо не допустить обрыва троса и т. п. Далее мы будем, в основном, рассматривать регулирование скорости.
Поскольку регулирование скорости связано с направленным формированием механических характеристик, выделим одну из возможных характеристик в качестве основной. Обычно в качестве основной характеристики принимают естественную характеристику двигателя, соответствующую номинальным значениям определяющих ее величин (напряжение, частота, магнитный поток и т. п.).
Все другие характеристики, создаваемые в целях регулирования скорости, будем называть искусственными. Они могут формироваться разными способами, отличающимися как по техническим, так и по экономическим показателям, рассматриваемым ниже.
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной – однозонное регулирование вниз от основной скорости, только выше естественной – однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной – двухзонное регулирование.
2. Диапазон регулирования – отношение максимальной возможной скорости к минимальной

При заданных изменениях момента нагрузки (рис. 2.6). Одинаковым естественным характеристикам и изменениям момента ∆Mс могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.
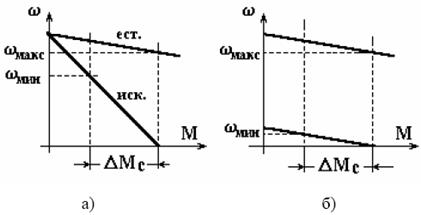
Рисунок 2.6 – К определению диапазона регулирования скорости
С жесткостью характеристик связан также еще один показатель – стабильность скорости на искусственных характеристиках. Она может быть низкая (рис. 2.6, а) и высокая (рис. 2.6, б); иногда требуется абсолютно жесткие характеристики (β = ∞), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
3. Плавность регулирования – возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, – плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик – ступенчатое регулирование.
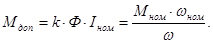
4. Допустимая нагрузка на искусственных характеристиках – очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению – это номинальный момент двигателя Мн. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн. Тогда допустимый момент для принудительно охлаждаемого двигателя:
 (2.10)
(2.10)
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с

Грубая оценка (2.10) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
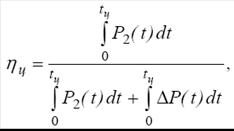
5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность  с потребляемой из сети Р1, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке:
с потребляемой из сети Р1, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке:
 (2.11)
(2.11)
Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД ηЦ определяемом с учетом конкретных условий работы привода за время цикла tц.
 (2.12)
(2.12)
Электромеханическое преобразование энергии в ДПТ осуществляется в результате взаимодействия постоянного магнитного потока статора и переменного во времени, но неподвижного в пространстве тока якоря. Благодаря фиксированному положению щеточного механизма векторы потока Ф и тока якоря Iя сдвинуты на постоянный угол  /2, что обеспечивает получение максимального момента М.
/2, что обеспечивает получение максимального момента М.
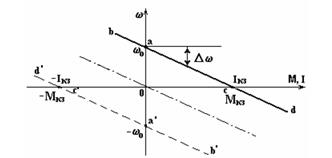
Рисунок. 2.7 – Механические (электромеханические) характеристики электропривода постоянного тока независимого возбуждения
Анализ уравнений механической и электромеханической характеристик ДПТ показывает три возможных способа регулирования его скорости и момента:
- введение добавочного резистора Rдоб в цепь якоря;
- изменение напряжения Uя питания якорной цепи;
- изменение магнитного потока Ф путем регулирования тока возбуждения.
В различных по способу возбуждения ДПТ по разному проявляется зависимость магнитного потока от тока якоря Ф(Iя) и соответствующим образом отличаются характеристики (рис. 2.7).
Различают однозонное регулирование вниз от основной скорости, однозонное регулирование вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной. [10]
Двигатель постоянного тока независимого возбуждения, который используется в имитационной установке, имеет две зоны регулирования (рис. 2.8). Зона I отвечает регулированию с постоянным моментом. Действительно, если регулирование осуществляется изменением сопротивления или напряжения главной цепи при неизменном номинальном магнитном потоке двигателя, то при номинальном токе якоря допустимый момент будет постоянным.
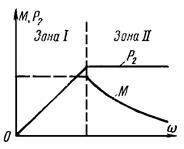
Рисунок 2.8 – Характеристики двух зон регулирования двигателя постоянного тока независимого возбуждения
 (2.13)
(2.13)
Мощность на валу двигателя в этой зоне изменяется по линейному закону, так как она пропорциональна угловой скорости:
 (2.14)
(2.14)
Зона II отвечает регулированию с постоянной мощностью, когда оно производится изменением магнитного потока двигателя.
В этом случае при неизменном токе якоря, равном номинальному, магнитный поток с увеличением угловой скорости необходимо регулировать по закону гиперболы. Если решить это уравнение относительно магнитного потока, то получим:
 (2.15)
(2.15)
Таким образом, становится явной зависимость допустимого момента от угловой скорости в зоне регулирования II, а именно:
 (2.16)
(2.16)
Отсюда следует, что мощность в этой зоне регулирования остается постоянной, так как:
 (2.17)
(2.17)