Обратная связь (inversefeedback, negativefeedback) - это зависимость текущих воздействий на объект от его состояния, обусловленного предшествующими воздействиями на этот же объект. Обратная связь может быть естественной (присущей объекту) или искусственно организованной. Различают отрицательную обратную связь и положительную обратную связь, действующую в первом случае в сторону уменьшения, а втором случае – в сторону увеличения отклонений текущих значений координат объекта от их предшествующих значений.
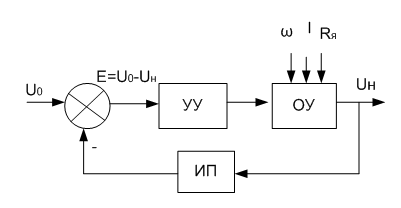
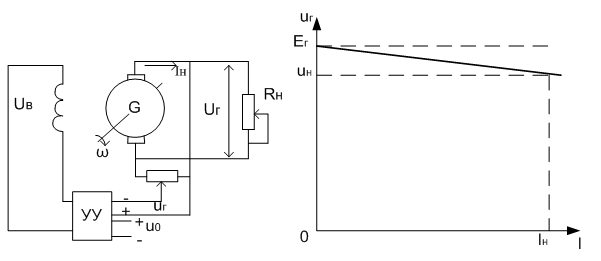
Отклонение управляемой величины через усилитель управляет возбуждением генератора. Если нагрузка генератора увеличится, то напряжение на зажимах генератора упадет, и, чтобы повысить его, нужно увеличить разность (u0–uг). Так как u0 = const, то необходимо уменьшить uг. При увеличении нагрузки напряжение генератора должно уменьшаться.
Uв = Ку (u0 – Кuuг),
Eг = KгКу (u0 – Кuuг)
Uн = Eг – Kf I = Kр u0 – KрКuuг - Kf I
Uг = Kр/(1 + Кр) u0 – Kf /(1 + Кр) I
Статическая ошибка в замкнутой системе уменьшается в (1+Кр) раз по сравнению с ошибкой в разомкнутой системе.
Статизм характеристики замкнутой системы можно определить по наклону статической характеристики разомкнутой системы Sр и ее коэффициенту передачи Кр
Sз = Sр/(1 + Kр)
Пример. Если U0 = 230В Sр = 4% и Ег = 240 В, ΔU = 10 В
Ку = 100, Кг = (230 +10) /100 = 2,4, то Кр = 240
Sз = 4 % / (1 + 240) ~ 0,016 % ΔU = 0,041 В
Достоинства САУ, работающих по замкнутому циклу:
- принципиально неограниченная точность управления;
- САУ устраняет отклонение управляемой величины независимо от причины, вызвавшей отклонение;
- отсутствие жестких требований к стабильности характеристик объекта управления и управляющего устройства.
Недостатки:
- возможность неустойчивого режима работы;
- трудность одновременного достижения высокой точности, устойчивости и быстродействия
Системы, в которых управляемая величина в установившемся режиме зависит от значения возмущающего воздействия, называются статическими. Sз ≠ 0.
В большинстве случаев статическая зависимость управляемой величины от возмущающих воздействий создает погрешность управлению и поэтому является нежелательной. Для полного устранения статизма, как видно из формулы, необходимо увеличивать коэффициент передачи до бесконечности, что практически невозможно.
Причиной того, что установившееся значение управляемой величины зависит от нагрузки или другого внешнего воздействия, состоит в пропорциональности между управляющим воздействием и отклонением управляемой величины. Если включить в состав АУУ устройство, способное при нулевом входном воздействии выходное воздействие поддерживать на любом уровне, то такая САУ будет в установившемся режиме всегда иметь ошибку, равную нулю. Таким устройством является интегратор. Его выходная величина будет меняться до тех пор, пока в системе не наступит установившийся режим при U = U0, т.е. при ошибке e = 0.

Схемы с исполнительным двигателем М.
В такой САУ статическая характеристика будет параллельна оси абсцисс. По отношению к возмущающему воздействию САУ называется астатической, если по окончании переходного процесса отклонение значения управляемой величины равно нулю.
4. КомбинированныеСАУ.
Представляют собой объединение в одну систему замкнутой системы управления по отклонению и разомкнутой системы управления по возмущающему воздействию. 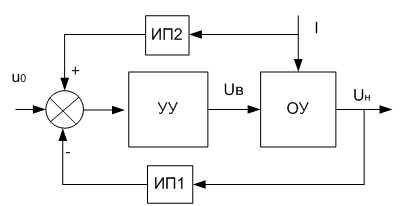
Введение системы компенсации по основному возмущению облегчает задачу замкнутой системы управления и тем самым позволяет упростить ее и повысить точность управления. Лучшее качество управления в комбинированных системах объясняется тем, что в них наиболее полно используется информация об объекте и влиянии внешней среды.
Примером комбинированной системы может служить система автоматического управления напряжения судового синхронного генератора.
Системы стабилизации напряжения генератора, действующие по отклонению напряжения, обеспечивают малую статическую ошибку, но их динамические качества во многих случаях могут оказаться неудовлетворительными.
С другой стороны, системы фазового компаундирования, реагирующие как на ток генератора, так и на коэффициент мощности, не компенсируют таких внешних воздействий, как изменение частоты вращения первичного двигателя, температура и т.д. Поэтому в таких системах статическая ошибка получается более 3%. Кроме того, настройка систем компаундирования даже одиночных генераторов и элементов систем отличаются друг от друга.
В этом случае только комбинированный принцип построения систем стабилизации напряжения СГ может удовлетворить поставленным требованиям. Комбинированные системы стабилизации состоят из контура компаундирования и цепи коррекции напряжения, которая осуществляет отрицательную обратную связь по напряжению.