Нехамин Илья Сергеевич
РАЗРАБОТКА СИСТЕМЫУПРАВЛЕНИЯ ДУГОВОЙ ПЕЧЬЮ ПОСТОЯННОГО ТОКА
Специальность 05.09.10 - Электротехнология
АВТОРЕФЕРАТ
диссертации на соискание ученой степени
кандидата технических наук
Москва – 2009
Работа выполнена в ГОУВПО «Московский энергетический институт (технический университет)» на кафедре Физики электротехнических материалов и компонентов и автоматизации электротехнологических комплексов
Научный руководитель доктор технических наук, профессор
Рубцов Виктор Петрович
Официальные оппоненты доктор технических наук, профессор
Макаров Анатолий Николаевич
кандидат технических наук,
Легович Юрий Сергеевич
Ведущая организация Федеральное государственное образовательное учреждение высшего профессионального образования “Государственный технологический университет "Московский институт стали и сплавов” (МИСИС)
Защита диссертации состоится 22 мая 2009 г. в аудитории М-611 в 14 часов на заседании диссертационного совета Д 212.157.02 при Московском энергетическом институте (техническом университете) по адресу: 111250, Москва, ул. Красноказарменная, д. 14
Отзывы на автореферат в двух экземплярах, заверенных печатью, просим направить по адресу: 111250, Москва, ул. Красноказарменная, д.14, Ученый Совет МЭИ (ТУ)
С диссертацией можно ознакомиться в библиотеке ГОУВПО МЭИ (ТУ)
Автореферат разослан «21» апреля 2009 г.
Ученый секретарь
диссертационного совета
кандидат технических наук, профессор Цырук С.А.
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность темы обусловлена недостаточной проработанностью методик, позволяющих проводить анализ и синтез систем управления током в дуговых сталеплавильных печах постоянного тока (ДПС), что вызвано, с одной стороны, недостаточным опытом эксплуатации ДПС, а с другой, - сложностью и нелинейным характером самого объекта управления. Эффективные электрические и технологические режимы работы печи обеспечиваются при проектировании системы управления печи по методикам, учитывающим влияние различных факторов. Диссертационная работа содержит описание соответствующих методик, практические рекомендации, результаты моделирования и промышленных испытаний. Применение этого инструмента позволит снизить как капитальные затраты на установку вновь разрабатываемых печей, так и эксплуатационные затраты действующих печей.
|
|
Технологический процесс плавки в дуговых печах предполагает необходимость осуществления автоматического зажигания дуги на различных стадиях технологического процесса плавки: первичном включении печи, обрыве дуги, ликвидации технологических коротких замыканий, возникающих при обвале шихты и т.д. Точность и быстродействие системы управления дуговой плавильной печью определяют её производительность и энергетическую эффективность.
Рассматриваемый класс дуговых сталеплавильных печей постоянного тока относится к мощной электрической нагрузке, установленная мощность которой достигает 20 МВА.
На основании изложенного, разработка системы управления технологическим процессом плавки в дуговой печи постоянного тока и особенно регулятора тока, удовлетворяющего технологическим требованиям, является актуальным.
|
|
Цель диссертационной работы - разработка комплекса методик моделирования и проектирования системы управления дуговых сталеплавильных печей постоянного тока, обеспечивающих минимизацию капитальных затрат при повышении энергетической эффективности работы разрабатываемых установок.
Для достижения указанной цели в работе были поставлены и решены следующие задачи:
1. Анализ особенностей технологического процесса плавки металла в дуговой печи, режимов работы электрооборудования, уровня развития систем управления.
2. Разработка методики анализа и синтеза регулятора тока дуговой печи постоянного тока.
3. Разработка уточненных моделей системы регулирования тока, включающих модель электрической дуги.
4. Исследование влияния пульсаций выпрямленного напряжения управляемого выпрямителя на режимы работы дуговой печи постоянного тока.
5. Экспериментальное исследование электрических и тепловых режимов процесса плавки в дуговой печи постоянного тока с целью уточнения моделей системы управления и проверки функционирования предлагаемой системы управления.
6. Разработка методики и аппаратных средств экспериментальных исследований характеристик технологического процесса и работы системы.
7. Разработка алгоритмов управления тепловым и электрическим режимами печи постоянного тока, обеспечивающей повышение эффективности процесса плавки, приводящее к снижению эксплуатационных затрат.
Методы исследования
При решении поставленных в диссертационной работе задач использованы: положения теории автоматического управления, теоретических основ электротехники, методы математического моделирования, теории теплопередачи. При проведении расчетов использовались программные пакеты структурного имитационного моделирования. Экспериментальные исследования проводились на действующем технологическом оборудовании и разработанных аппаратных и программных средствах.
|
|
Обоснованность и достоверность научных результатов подтверждается корректностью принимаемых допущений, обоснованностью принятых методов исследований и совпадением теоретических и экспериментальных данных, полученных на действующей установке.
Научная новизна работы заключается в следующем.
1. Определены требования к составу и характеристикам источника питания постоянного тока, обеспечивающего условия горения дуги в различных режимах работы печи, и обоснована целесообразность совершенствования регулятора тока для повышения эффективности процесса плавки.
2. На основании теоретических и экспериментальных исследований уточнены зависимости параметров регулятора тока от динамического изменения параметров электрической дуги и тепловых процессов на различных стадиях плавки.
3. Предложены и экспериментально обоснованы модели регулятора тока для различных режимов работы управляемого выпрямителя и печи (режимы зажигания дуги, обрыва дуги и т.д.)
4. Предложена методика и разработаны модели регулятора тока, учитывающие влияние пульсаций выпрямленного напряжения и нелинейных характеристик параметров короткой сети на процессы зажигания дуги.
Практической значимостью обладает предложенный в работе комплекс методик исследования и проектирования, позволяющих проводить анализ и синтез систем питания и управления, а также методики экспериментального исследования процесса плавки. Научные и технические решения, предложенные в работе, использованы ООО «НПФ КОМТЕРМ» при выполнении работ по разработке, изготовлению и наладке дуговой сталеплавильной печи постоянного тока установленной мощностью 9,6 МВА емкостью 12тонн для ООО «ВКМ-Сталь» г.Саранск. При настройке системы применены методы, предложенные в работе при исследовании объектов управления.
Апробация работы
Основные результаты и положения диссертационной работы докладывались и обсуждались на одиннадцатой международной научно-технической конференции с международным участием Радиоэлектроника, электротехника и энергетика, Всероссийской научно-технической, проходившей в г. Екатеринбурге:, в 2006 г. (АПЭЭТ-2006), Международной конференции «Электромеханика, электротехнологии, электротехнические материалы и компоненты» (2008г), семинарах кафедры ФЭМАЭК и научно-технических семинарах в ООО «НПФ КОМТЕРМ» (2006-2008 гг).
Публикации
Основные результаты диссертации изложены в 7 печатных работах, в том числе 2 – в изданиях, рекомендованных ВАК РФ для публикации основных результатов диссертаций на соискание ученых степеней доктора и кандидата наук, и патенте.
Структура и объем диссертации.
Диссертация состоит из введения, 4 глав, заключения, библиографического списка из 71 наименований, содержит 122 страниц основного текста и 32 иллюстрации.
Содержание работы.
Во введении обоснована актуальность темы диссертационной работы, сформулированы цель и задачи исследования, дается общая характеристика работы.
Первая глава посвящена анализу особенностей конструкции и технологического процесса плавки дуговой печи постоянного тока, требований к источнику питания и системам управления процессом плавки.
Выявлены технологические особенности ДПС в сравнении с печами переменного тока. В печах постоянного тока есть возможность использовать два канала управления мощностью, что позволяет получить более равномерное распределение температурного поля, снизить расход электродов и улучшить экологические характеристики. В отличие от печей переменного тока управление процессом плавки в печах постоянного тока обеспечивается двумя системами регулирования: системой регулирования напряжения путем перемещения электрода и системой регулирования тока, построенной на базе управляемого выпрямителя. Показано, что наиболее значительное влияние на режимы работы электрооборудования и ход технологического процесса плавки оказывает система управления током печи. Как показал проведенный анализ, задачи построения регулятора тока нельзя считать полностью решенными.
Вторая глава посвящена разработке системы регулирования тока, включающей модель электрической дуги.

Рис. 1 Функциональная схема регулятора тока
В результате ранее проводившихся исследований была построена эмпирическая зависимость параметров дуги от введенной электроэнергии. Выражение теплового состояния в печи через введенную электроэнергию удобно для использования при управлении процессом плавки.
Модель дуговой печи постоянного тока, работающей в интервале токов от 0,1 до 36 кА можно представить в виде выражения:
 (1),
(1),
где  - напряжение дуги, В; I - ток дуги, А; L – длина межэлектродного промежутка, м;
- напряжение дуги, В; I - ток дуги, А; L – длина межэлектродного промежутка, м;  ;
; 
 ;
;  ;
;  - конечная наивысшая за плавку температура нагрева жидкого металла;
- конечная наивысшая за плавку температура нагрева жидкого металла;  - текущая средняя температура расплавляемой шихты, определяемая как
- текущая средняя температура расплавляемой шихты, определяемая как
 (2),
(2),
где Q – энергия, израсходованная с начала плавки по счетчику, G – масса металлозавалки; ς - средняя удельная теплоемкость металла.
Влияние на вольтамперные характеристики дуги различных электрических и тепловых параметров печи иллюстрируют графики, приведенные на рис.2.
Многомерные зависимости параметров дуги постоянного тока от введенной энергии Q и длины дуги l, приведенные на рис. 2 б, в, г иллюстрируют качественные и количественные изменения напряжения на дуге при изменении технологического режима. В частности, при увеличении среднемассовой температуры шихты напряжение на дуге постепенно уменьшается. Указанные зависимости были положены в основу разработанной многомерной модели, учитывающей характеристики дуги постоянного тока.
На основании экспериментальных исследований и печи постоянного тока и используемых в практике исследований тиристорных выпрямителей была разработана модель регулятора тока печи, представленная в виде структурной схемы.
 а
а
|  б
б
|  в
в
|
Рис. 2. Характеристики дуги а, б (lдуги=0,005м), в (lдуги=0,05м), г (lдуги=0,5м) для различных длин печной дуги
В отличие от используемых моделей в рассматриваемой схеме использован ПИД-регулятор и ограничитель, учитывающий максимальное напряжение выпрямителя. Короткая сеть печи, сглаживающий дроссель и внутреннее сопротивление выпрямителя учитывалось в структурной схеме инерционным звеном первого порядка. Модель дуги представлена в виде безинерционного нелинейного элемента, характеристики которого показаны на рис.2. Система рис.3 является нелинейной, поэтому её исследование в работе проводилось с использованием пакета прикладных программ Simulink Mathlab, предназначенных для анализа и синтеза систем автоматического управления.

Рис. 3 Структурная схема системы регулирования тока с учетом характеристик дуги
Блок-схема модели, составленная в терминах Simulink приведена на рис.4. Она позволяет в диалоговом режиме проводить проектирование регулятора тока дуговой печи постоянного тока с обобщенными или конкретными параметрами печи и источника питания.

Рис. 4. Блок-схема модели регулятора тока (в среде Simulink)
В процессе исследования было установлено, что нелинейность системы приводит к необходимости коррекции настроек ПИД-регулятора при изменении величины задания тока. Для устранения этого недостатка была предложена система с параметрической адаптацией, осуществляющая автоматическую коррекцию коэффициентов регулятора при изменении величины задания тока. На схеме рис.4 показаны элементы, выполняющие функции адаптации. В процессе исследования рассчитывались переходные функции изменения тока, напряжения на дуге, длина дуги, напряжение источника питания и задание тока в различных режимах работы печи, в том числе короткого замыкания и разрыва дуги при зажигании.
Графики на рис.5 иллюстрируют рассчитанные переходные функции для режима короткого замыкания и зажигания дуги, по которым определялось качество регулирования, устойчивость и точность регулятора тока.
 а Дуга не зажглась. а Дуга не зажглась.
|  б Дуга зажглась б Дуга зажглась
|
Рис. 5. Осциллограммы переходных функций тока и напряжения на дуге в режимах короткого замыкания и зажигания дуги
Процесс на рис.5,а показывает невыполнение критерия i>0. Осциллограмма рис.5,б иллюстрирует процесс при котором критерий выполняется. По переходным функциям вида рис.5 для режима зажигания дуги определялись граничные значения параметров системы, включающей в себя источник питания, регулятор тока и короткую сеть. Посредством таких переходных функций в диалоговом режиме может быть осуществлен синтез системы регулирования тока для каждой конкретной установки.
Третья глава посвящена исследованию влияния пульсаций выпрямленного напряжения на работу системы регулирования тока, оцениваемую по выбранному критерию i>0.
Наиболее тяжелые условия горения дуги соответствуют малым токам и моментам зажигания дуги, которые характеризуются низким значениям постоянной составляющей выпрямленного напряжения Ud и большой величиной пульсаций переменного напряжения ΔUd. Для обеспечения устойчивого горения дуги при наличии пульсаций выпрямленного напряжения в источник питания вводят сглаживающий дроссель (реактор) Lд. Наличие дросселя в составе источника питания приводит к существенному удорожанию (порядка 20%) установки и увеличению её габаритов. Поскольку габариты и стоимость сглаживающего дросселя пропорциональны величине его индуктивности, то, очевидно, что уточнение требуемой величины индуктивности дросселя, обеспечивающей устойчивость горения дуги, является актуальной проблемой.
При моделировании регулятора тока пульсации выпрямленного напряжения учитывались путем ввода в канал регулирования постоянной составляющей выпрямленного напряжения переменной составляющей, зависящей от угла регулирования тиристоров a. На рис.6 приведена структурная схема регулятора тока ДПС, использующая предлагаемый способ учета пульсаций выпрямленного напряжения.

Рис. 6. Структурная схема регулятора тока с учетом пульсаций выпрямленного напряжения
В схеме рис.6 канал, определяющий постоянную составляющую Ud выпрямленного напряжения представлен инерционным звеном первого порядка с передаточной функцией Wп (p)=k п/(Tпp+1), где kп – коэффициент передачи преобразователя, а Tп – постоянная времени, учитывающая запаздывание в работе выпрямителя и принимаемая обычно равной 0,01 с.
Переменная составляющая выпрямленного напряжения Δud создается генератором сигналов ГС, формирующим переменное напряжение Uп неизменной величины (Uп=const). Форму кривой напряжения Uп при моделировании можно принимать, как синусоидальной, так и более сложной, определяемой конкретной схемой управляемого выпрямителя. Частота переменного напряжения Uп определяется пульсностью схемы выпрямления. В частности, для наиболее применимой в системах питания ДПС 12-пульсной схемы выпрямления частота пульсаций составляет fп=600 Гц. Следует отметить, что для рассматриваемого класса установок вид кривой переменной составляющей не будет оказывать существенного влияния на величину пульсаций тока нагрузки, являющейся по существу фильтром высоких частот.

Рис. 7. Блок-схема модели для исследования влияния пульсаций выпрямленного напряжения.
Следовательно, допустимо представлять переменную составляющую Uп выпрямленного напряжения в виде синусоиды. Зависимость амплитуды переменной составляющей выпрямленного напряжения в схеме рис.6 учитывается введением функционального блока ФБ1 и блока умножения, выходной сигнал которого ΔUd поступает на сумматор.
Исследования проводились на основе метода структурного моделирования с использованием пакета прикладных программ SIMULINK. На рис.7 приведена блок-схема модели, позволяющая в диалоговом режиме проводить анализ и синтез системы для различных режимов и параметров конкретной установки.
В процессе исследования на модели рис.7 рассчитывались переходные функции изменения напряжения на дуге, пульсаций выпрямленного напряжения и тока дуги, на основании которых определялось влияние частоты пульсаций на работу системы. Приведенные на рис.8 осциллограммы переходных функций иллюстрируют влияние пульсаций выпрямленного напряжения на переходные процессы изменения тока печи.
 а
а
|  б
б
|
Рис. 8. Осциллограммы зажигания дуги при учете пульсаций выпрямленного напряжения в 6-ти (а) и 12-ти (б) пульсной схемах выпрямления
Недостатком численного решения системы дифференциальных уравнений, которое осуществляет и пакет прикладных программ Simulink, является невозможность получения общих аналитических выражений, связывающих свойства системы с параметрами ее элементов.
Для получения обобщающих закономерностей, применимых для класса дуговых печей различной мощности, в работе предложено использовать систему относительных величин, в которой за базовое время принято частота питающей сети, за базовое напряжение номинальное значение выпрямленного напряжения, а за базовый ток – номинальный ток печи.
Нелинейность вольтамперной характеристики дуги проявляется в работе регулятора том, что минимально допустимое значение постоянной времени короткой сети Tк* зависит не только от величины и частоты пульсаций выпрямленного напряжения, но и от задания тока i*з регулятора. На основании анализа условий зажигания дуги при различных значениях задания тока и частоты пульсаций выпрямленного напряжения были получены сравнительные зависимости необходимого превышения постоянной времени Tк короткой сети относительно постоянной времени выпрямителя Tп - λ = Tк/Tп, приведенные на рис. 9. Оказалось, что диапазон изменения минимально допустимой постоянной времени короткой сети Tк от задания тока i*з очень велик, поэтому зависимости на рис. 9 для наглядности сравнения построены в логарифмическом масштабе.
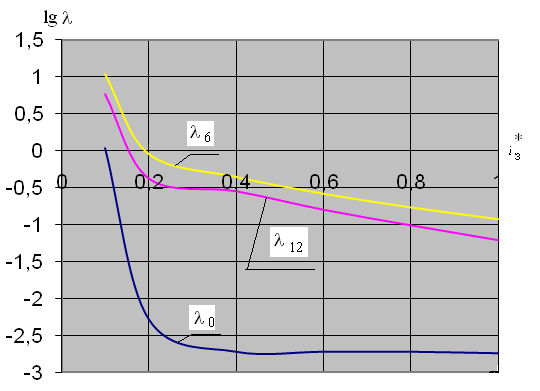
Рис. 9. Граничные зависимости параметров короткой сети, при которых выполняется условие I>0
В работе также исследовалось влияние параметров регулятора на качество работы системы регулирования тока. Предыдущие исследования проводились в предположении, что датчик тока является безинерционным. Однако, практическая реализация безинерционного датчика тока невозможна. Наличие преобразования сигналов и фильтров в канале обратной связи приводит к увеличению постоянной времени датчика тока. Как показали исследования, устойчивая работа регулятора тока обеспечивается при постоянной времени в канале обратной связи не более 200 мкс. Характерно, что предельно допустимое значение инерционности в канале обратной связи инвариантно относительно частоты пульсаций выпрямленного напряжения.
В работе также было проведено исследование влияния квантования по времени. Учет квантования по времени в цифровом регуляторе тока обеспечивается введением в прямой канал и канал обратной связи звеньев запаздывания с передаточной функцией Wз(p) = e - τз p . Время запаздывания τ з, в канале обратной связи по току определяется временем преобразования tт сигнала обратной связи в аналого-цифровом преобразователе, а в прямом канале управления - временем реализации алгоритма управления tу. Установлено, что максимально допустимое по критерию устойчивости системы даже в режиме короткого замыкания квантование по времени в регуляторах тока дуговой печи постоянного тока не должно превышать 240 мкс. Превышение времени квантования предельно допустимого значения, определяемого неравенством tз > 240 мкс, приводит к нарушению устойчивости регулятора. Это условие сохраняется как при 12-ти, так и при 6-ти тактной пульсности схемы выпрямления.
Исследовано влияние зависимости требуемой индуктивности сглаживающего дросселя от тока и установлено положительное влияние нелинейности дросселя на стабилизацию процесса горения дуги, особенно при наличии пульсаций выпрямленного напряжения.
В четвертой главе приводятся результаты экспериментального исследования и реализация системы управления режимом работы дуговой печи постоянного тока.
Экспериментальные исследования проводились, как на промышленной сталеплавильной печи постоянного тока ДПС-12, так и на специально разработанном стенде, использованном для отработки наладки источника питания. Функциональная схема стенда (общий вид стенда) приведен на рис. 10,а. Стенд позволяет проводить исследования работы выпрямителя на активно-индуктивную нагрузку с дугой в режимах короткого замыкания, зажигания дуги, сброса и наброса нагрузки. Дуговая нагрузка при испытаниях имитировалась сварочными электродами, соединенными параллельно. Работу источника питания на дуговую нагрузку иллюстрируют осциллограммы, приведенные на рис.10,б, на которых приведены кривые изменения тока, напряжения и мощности в режиме ручного зажигания дуги и последующего увеличения её длины до погасания. Осциллограммы показывают, что источник питания обеспечивает устойчивое горение дуги, стабилизацию тока при изменении длины дуги и не вызывает перенапряжений при её погасании, т.е. предлагаемый источник питания удовлетворяет требованиям, предъявляемым дуговой установкой постоянного тока. Полученные осциллограммы согласуются с осциллограммами, приведенными в гл. 2 и 3.
 а)
а)
|  б)
б)
|
Рис. 10. Общий вид (а) и осциллограммы (б), снятые на стенде для испытания источника тока дуговой печи
На основании проведенных исследований была разработана система управления дуговой плавильной печью постоянного тока мощностью 9600 МВА (рис.11).
Система построена в соответствии с двухуровневой иерархической структурой. Верхний уровень иерархии (рис.11,б) включает в себя промышленный компьютер с системой визуализации хода процесса и состояния агрегатов печи. Нижний уровень образован универсальным программируемым контроллером и исполнительными элементами, управляющими током печи, перемещением электрода и вспомогательными механизмами, определяющими ход технологического процесса. На рис.11,а показан общий вид реализованной системы управления печью.
 а)
а)
|  б)
б)
|
Рис. 11. Система комплексного управления
Исследования работы печи с предложенной системой управления проводилось с использованием разработанного при участии автора исследовательского комплекса, входящего в состав системы управления печью. Комплекс позволяет регистрировать основные электрические и тепловые величины, определяющие работу печи, архивировать с возможностью передачи и просмотра данных по каждой конкретной плавке и группе плавок, а также проводить первичную обработку полученной информации для последующего анализа. Кроме того, разработанный комплекс позволяет снимать различного рода регистрограммы, иллюстрирующие изменение электрических и тепловых величин (см. рис.12).
Экспериментальные исследования работы системы управления, использующей разработанные алгоритмы и методики, подтверждают реализуемость, работоспособность системы и соответствие графиков, полученных экспериментально и теоретически.

Рис.12 Регисторограммы режима плавки в ДПС-12
В заключении обобщены основные результаты и выводы по работе.