Приложение № 5.
Координатная привязка ходов и сетей к пунктам государственной геодезической сети. [10]
Самым простым способом привязки является непосредственное примыкание теодолитного или полигонометрического хода к пунктам триангуляции или полигонометрии высшего класса с возможностью измерения примычных углов (азимутальная привязка). С этим видом привязки студенты знакомятся на первом курсе при обработке тахеометрического хода (рис. 5.1).
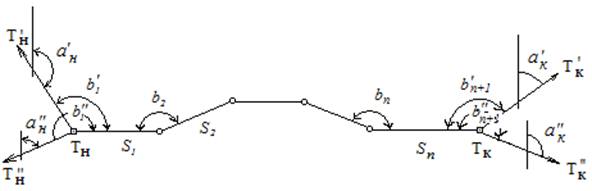
рис. 5.1
В ряде случаев ход не удается привязать к исходным направлениям. Например, когда на исходном пункте отсутствует видимость с земли на соседние пункты, наружные знаки пришли в ветхость, а центры на ориентирных пунктах потеряны. В таких случаях используют способ координатной привязки.
Имеются исходные пункты, но отсутствуют пункты ориентирования.
Теория координатной привязки достаточно проста.
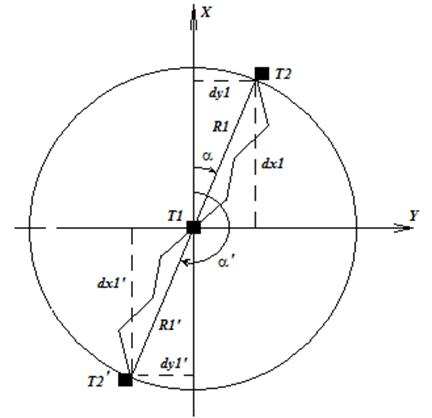
Предположим, что через центр круга (рис. 5.2), радиусом R, проходит система координат XY.
Радиус R1 в системе координат XY проведен под углом a и имеет приращения координат  и
и  .
.
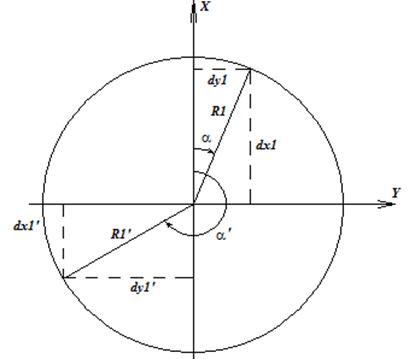
Рис 5.2
Радиус R1’ в той же системе координат XY проведен под углом a’ и имеет приращения координат  и
и  .
.
Несмотря на то, что сами приращения координат изменяются с изменением a, радиус данной окружности остается постоянным:
 (5.1)
(5.1)
Используя теорему Пифагора можно записать
 (5.2)
(5.2)
 (5.3)
(5.3)
Для вычисления приращений координат радиусов R1 и R1’ используем прямую геодезическую задачу:
 (5.4)
(5.4)
 (5.5)
(5.5)
Для того чтобы через радиус R’ вычислить приращения координат радиуса R, R’ необходимо довернуть на угол  и тогда приращения координат будут одни и те же.
и тогда приращения координат будут одни и те же.

 (5.6)
(5.6)
Алгоритм решения задачи.
 Предположим, что между двумя твердыми пунктами Т1 и Т2 проложили ход с координатной привязкой. (рис. 5.3) Необходимо вычислить координаты поворотных точек в системе координат ГГС.
Предположим, что между двумя твердыми пунктами Т1 и Т2 проложили ход с координатной привязкой. (рис. 5.3) Необходимо вычислить координаты поворотных точек в системе координат ГГС.
Рис. 5.3
Исходя из изложенного, предположим, что пункт Т1 начало вектора R1, а пункт Т2 его конец.
Задача решается в два приближения.
Первое приближение. Таблица 5.1
1. Определение длины и дирекционного угла истинной замыкающей хода.
а) Найдем приращения истинных координат и длину замыкающей линии хода R1 между пунктами ГГС Т1 и Т2.
 (5.7)
(5.7)
 . (5.8)
. (5.8)
б). Определим румб истинной замыкающей R1.
 . (5.9)
. (5.9)
По известным правилам, от румба линии перейдем к дирекционному углу a.
2. Определение приращений координат, длины и дирекционного угла замыкающей хода с произвольно заданным дирекционным углом первой измеренной линии.
а) Зададим первой линии хода произвольный дирекционный угол a‘ и определим по известным зависимостям последующие дирекционные углы линий хода.
 (5.10)
(5.10)
Как правило, дирекционному углу первой линии задают значение a‘ = 0.
б). По измеренным линиям и вычисленным дирекционным углам найдем приращения координат поворотных точек хода
 (5.11)
(5.11)
в). Просуммируем приращения координат и определим длину замыкающей проложенного хода R1’. Оценим качество измерений.
 (5.12)
(5.12)
По определению, длина радиус-вектора не зависит от угла его поворота. Тогда можно записать
R = R’ (5.13)
Однако ввиду неизбежных ошибок измерений данное соотношение выполняться не будет, а будет верно равенство
 , (5.14)
, (5.14)
где  - линейная невязка хода
- линейная невязка хода  , которая является совокупностью ошибок линейных и угловых измерений.
, которая является совокупностью ошибок линейных и угловых измерений.
Если выполняется соотношение
 ; (5.15)
; (5.15)
где 1/Т - заданная относительная погрешность, то вычисления можно продолжить. В противном случае, присутствуют грубые ошибки измерений, которые необходимо исключить, выполнив повторные измерения.
г). Определение угла доворота  вычисленной замыкающей линии хода - R’
вычисленной замыкающей линии хода - R’
По вычисленной сумме приращений координат измеренных линий найдем румб r’ - вычисленной замыкающей.
 , (5.16)
, (5.16)
от которого, перейдем к дирекционному углу a’.
Чтобы получить истинные приращения координат необходимо развернуть R’ с заданным углом a’ в направлении R с заданным истинным углом a. Для этого определим угол доворота линии R’.
 (5.17)
(5.17)
Введя поправку в начальный, произвольно взятый дирекционный угол 
 , (5.18)
, (5.18)
и исправив последующие дирекционные углы за , окончательно определим исправленные приращения координат.
(Если a’- дирекционный угол первой линии =0, то  – искомый дирекционный угол первой стороны вычисляемого хода)
– искомый дирекционный угол первой стороны вычисляемого хода)
На этом первое приближение заканчивается.
Второе приближение. Таблица 5.2.
Далее используется стандартный алгоритм вычисления рабочих координат. Отличие состоит в том, что в данном алгоритме отсутствует угловая невязка, которая скомпенсировалась доворотом хода – замыкающая хода совпадает с истинной замыкающей. [10].
| Пример вычисления координат точек тахеометрического хода способом координатной привязки | |||||||||||
| Таблица 5.1 | |||||||||||
| Первое приближение | |||||||||||
| уг.повор. | дир.уг | S | dX | dY | |||||||
| гр | мин | сек | гр | мин | сек | ||||||
| пп40 | |||||||||||
| 0,0 | 552,017 | 552,017 | 0,000 | ||||||||
| 13,1 | |||||||||||
| 13,1 | 565,349 | 213,122 | 523,639 | ||||||||
| 37,5 | |||||||||||
| 50,6 | 339,034 | 242,241 | 237,199 | ||||||||
| 13,9 | |||||||||||
| 4,5 | 400,419 | 399,569 | 26,081 | ||||||||
| 32,7 | |||||||||||
| 37,2 | 356,847 | 337,494 | -115,921 | ||||||||
| 62,5 | |||||||||||
| 39,7 | 372,273 | 326,103 | -179,566 | ||||||||
| 41,3 | |||||||||||
| 21,0 | 348,732 | 305,467 | -168,239 | ||||||||
| пп78 | |||||||||||
| d практ = | 2376,012 | 323,194 | |||||||||
| d ист = | -1281,861 | 2026,442 | |||||||||
| [ S ] = | 2934,671 | ||||||||||
| R1 ист = | 2397,840 | ||||||||||
| tg r = | -1,5808594 | ||||||||||
| Alfa R1 ист | 58,0 | ||||||||||
| R1 выч = | 2397,893 | ||||||||||
| dr = | 0,053131 | ||||||||||
| dr / R | 0,000022 | ||||||||||
| 1/R = | 45 131 | <1/25 000 | |||||||||
| tg r = | 0,1360238 | ||||||||||
| Alfa ' | 45,8 | ||||||||||
| d Alfa | 12,2 | ||||||||||
| Таблица 5.2 | ||||||||||
| Второе приближение | ||||||||||
| дир.уг | dX | dY | dX | dY | X | Y | ||||
| гр | мин | сек | поправка | поправка | ||||||
| выч. | выч. | Исправл. | Исправл. | |||||||
| пп40 | 0,005 | -0,008 | 10901,025 | 7050,400 | ||||||
| 12,2 | -229,532 | 502,034 | -229,527 | 502,026 | ||||||
| 0,005 | -0,009 | 10671,498 | 7552,426 | |||||||
| 25,3 | -564,843 | -23,908 | -564,837 | -23,917 | ||||||
| 0,003 | -0,005 | 10106,661 | 7528,509 | |||||||
| 2,8 | -316,446 | 121,679 | -316,443 | 121,674 | ||||||
| 0,004 | -0,006 | 9790,218 | 7650,183 | |||||||
| 16,7 | -189,863 | 352,545 | -189,859 | 352,539 | ||||||
| 0,003 | -0,005 | 9600,359 | 8002,721 | |||||||
| 49,4 | -34,907 | 355,135 | -34,904 | 355,130 | ||||||
| 0,004 | -0,006 | 9565,455 | 8357,851 | |||||||
| 51,9 | 27,711 | 371,240 | 27,715 | 371,234 | ||||||
| 0,003 | -0,005 | 9593,170 | 8729,085 | |||||||
| 33,2 | 25,990 | 347,762 | 25,994 | 347,757 | ||||||
| пп78 | 9619,164 | 9076,842 | ||||||||
| Контроль | 9619,164 | 9076,842 | ||||||||
| Сумма практическая | -1281,889 | 2026,487 | -1281,861 | 2026,442 | ||||||
| Сумма теоретическая | -1281,861 | 2026,442 | ||||||||
| f x, f y = | -0,028 | 0,045 | ||||||||
| f s = | 0,05313137 | |||||||||
| 1,8105E-05 | [v]= | 0,028 | -0,045 | |||||||
| Fs/[S] = | 55 234 |