Тема 2.2 Автоматические регуляторы
1 Классификация, характеристики автоматических регуляторов, законы регулирования
Классификация, характеристики автоматических регуляторов, законы регулирования
Если при непрерывном изменении входной величины регулирующий орган перемещается непрерывно, то такой регулятор называется регулятором непрерывного действия. Любой регулятор непрерывного действия работает в соответствии с установленным для него законом регулирования.
Под законом регулирования понимают вид математической зависимости между выходной (перемещение регулирующего органа и) и входной величинами регулятора (отклонение регулируемого параметра от заданного значения е = у - узад). Закон регулирования наглядно отображается временной характеристикой регулятора.
Несмотря на большое разнообразие объектов регулирования характерные их свойства, имеющие значение для целей управления, немногочисленны. Это объясняется общностью физических законов, которым подчиняются различные процессы, протекающие в объектах и системах регулирования.
Подобная универсальность присуща и законам регулирования для самых различных технологических объектов. Используя весьма небольшое число типовых законов регулирования, можно достаточно качественно управлять всеми промышленными объектами. Для каждого объекта достаточно подобрать лишь параметры настройки регулятора. Применение типовых законов регулирования позволяет использовать в промышленных САР стандартные, серийно выпускаемые регуляторы. Название регулятору обычно дают по типу закона регулирования, который он, как принято говорить, отрабатывает.
По динамическим свойствам, т. е. по закону регулирования, регуляторы непрерывного действия подразделяются:
■ на пропорциональные П-регуляторы (статические);
■ интегральные И-регуляторы (астатические);
■ пропорционально-интегральные ПИ-регуляторы (изодромные);
■ дифференциальные (Д) регуляторы:
■ пропорционально-дифференциальные (ПД);
■ пропорционально-интегралодифференциальные (ПИД-регуляторы)
Свойства регулятора с тем или иным законом регулирования проявляются, как и у объектов регулирования, в реакции на скачкообразное входное воздействие.
Сущность основных законов регулирования для лучшего усвоения изложена на примерах простейших регуляторов прямого действия, где регулируемым параметром является давление газа в газосборнике.
Пропорциональный регулятор (П-регулятор).
Автоматические регуляторы, у которых отклонение регулируемой величины от заданного значения вызывает перемещение регулирующего органа на величину, пропорциональную величине этого отклонения, называются пропорциональными, или статическими. Каждому значению регулируемого параметра соответствует одно определенное положение регулирующего органа. Эта пропорциональная зависимость достигается за счет действия жесткой обратной связи, поэтому П-регуляторы называются также регуляторами с жесткой обратной связью. Скорость перемещения регулирующего органа таких регуляторов пропорционально скорости изменения регулируемой величины. П-регуляторы, как и интегральные, могут быть прямого и непрямого действия.
П-регулятор работает согласно следующему уравнению:

где S1 — настроечный параметр, равный коэффициенту усиления регулятора: S1 = Кр.
Знак «минус» в выражении закона регулирования означает, что при положительном отклонении регулируемой величины регулирующий орган перемещается в сторону закрытия, а при отрицательном отклонении (уменьшения против заданного значения) — в сторону открытия.
Задачей регулятора (рис. 1, а) является стабилизация давления газа в сборнике изменением притока его Qп при изменяющейся нагрузке, т.е. изменяющемся расходе газа. Пусть давление равно заданному Рз при номинальной (расчетной) нагрузке Qр.ном, а САР находится в равновесии, т.е.Р = Рз при Qп = Qр.ном. Усилие, создаваемое давлением газа на мембрану регулятора, уравновешено усилием деформации пружины; затвор регулирующего органа находится в среднем положении.

Рисунок 1 - Пропорциональный регулятор:
а — схема регулятора; 6 — временная характеристика
Теперь предположим, что потребление газа внезапно (скачкообразно) увеличилось. Это приведет к снижению давления в сборнике и нарушению равновесия сил, действующих на мембрану. Под преобладающим усилием пружины мембрана, а с ней и затвор будут перемещаться вверх, увеличивая проходное сечение регулирующего органа до восстановления равновесия между притоком и новым значением расхода. Когда это состояние будет достигнуто, затвор займет новое положение выше начального. Сжатие пружины при этом уменьшится, и для уравновешивания ее усилия в новом состоянии потребуется меньшее давление газа.
Из этого следует очень важный вывод: П-регулятор восстановил равновесие в САР, т. е. выполнил главную задачу, но значение регулируемого параметра стало другим, не равным заданному. Разность между заданным и новым установившимся значением регулируемого параметра называется остаточным отклонением его или статической ошибкой Δст П-регулятора (рис. 1, б). Она увеличивается с увеличением нагрузки объекта. Обычно такая ошибка существенного значения не имеет, а в случае необходимости ее можно устранить, изменив задание регулятору. В данном случае надо дополнительно сжать пружину вращением по резьбе нижней опорной гайки.
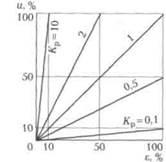
Статическая характеристика П-регулятора согласно его уравнению есть прямая линия, т. е. каждому значению регулируемого параметра соответствует только одно определенное положение затвора регулирующего органа. Коэффициент усиления Кр характеризует чувствительность регулятора. Его можно изменять (настраивать) с учетом свойств объекта регулирования. В конструкции регулятора имеются специальные органы настройки. В ряде регуляторов настраивают не коэффициент усиления, а обратную ему величину, выраженную в процентах. Она называется зоной регулирования (ЗР):

На рис. 2 приведены статические характеристики регулятора, полученные при различных значениях Кр. Из них видно, что чем больше Кр, тем на большую часть своего рабочего хода переместится затвор регулирующего органа при одинаковом изменении регулируемого параметра, и наоборот. Чрезмерным увеличением чувствительности П-регулятор можно приблизить к позиционному, что отразится на качестве регулирования. Оптимальное значение КР находят в каждом конкретном случае. В рассматриваемом регуляторе давления его чувствительность зависит от жесткости пружины: чем она меньше, тем чувствительнее регулятор.
Динамические свойства П-регулятора видны из его временной характеристики (см. рис. 1, б): если ступенчатое изменение ε принять за 1, то изменение U будет численно равно Кр. Способность П-регулятора быстро восстанавливать равновесие в САР обеспечили ему широкое применение, например, в объектах без самовыравнивания.
|
Рисунок 2– статические характеристики П-регулятора