Они бывают двух видов: пропорционально-дифференциальные и пропорционально-интегралодифференциальные.
Такие регуляторы целесообразно применять в тех случаях, когда нагрузка объектов регулирования изменяется часто и быстро, а запаздывания велики.
ПД-регулятор осуществляет регулирование не только по величине отклонения регулируемого параметра, но и по его скорости.
Такое регулирование применяют в тех случаях, когда в САР имеются большие запаздывания, отрицательно влияющие на качество регулирования. Уменьшить это влияние можно, если оказать на объект опережающее (предварительное) регулирующее воздействие с учетом скорости изменения регулируемого параметра.
Устройства, позволяющие выработать это воздействие, называются дифференцирующими, или устройствами предварения. Как правило, ими дополняют П- и ПИ-регуляторы, поэтому их также называют приставками. ПД-регулятор образован П-регулятором и Д-приставкой. Он работает согласно уравнению
где Тд — время дифференцирования (предварения) — настроечный параметр Д-приставки.
Схема регулятора изображена на рис. 5, а применительно к регулированию давления газа. С объектом связаны верхняя и нижняя полости мембранной коробки Д-приставки, причем на входе в нижнюю установлен регулируемый дроссель. Шток выводится через уплотнительный сильфон. Когда давление газа постоянно, а дроссель несколько приоткрыт, это Давление устанавливается в обеих полостях коробки и мембрана уравновешивается сверху и снизу. Если же давление в объекте, а следовательно, и в верхней полости резко снижается, то в первый момент времени мембрана окажется неуравновешенной — дроссель не позволит быстрому снижению давления снизу ее. Под действием возникшего перепада давлений мембрана так же резко прогнется вверх и через шток переместит затвор регулирующего органа в крайнее верхнее положение. В этот же момент начнется медленный переток газа из нижней полости через дроссель, и давление в ней постепенно снизится до величины сверху мембраны, которая вновь уравновесится и вернется в исходное состояние. Затвор, двигаясь обратно вниз, займет положение, в которое его установит П-узел регулятора. Временная характеристика ПД-регулятора показана на рис. 5, б. Из нее видно, что Д-приставка реагирует только на скорость изменения регулируемого параметра, временно увеличивая чувствительность П-регулятора. Поэтому проходное сечение регулирующего органа в момент отклонения регулируемого параметра дополнительно изменяется, что обеспечивает компенсацию запаздывания. В рассмотренном примере время Тд устанавливается дросселем. Чем меньше он открыт, тем больше будет эффект предварения. П-регулятор настраивается известным образом. Д-приставку можно подключать и к ПИ-регулятору тогда получится еще более сложный ПИД-регулятор с тремя настроечными параметрами Кр, Ти, ТД.
Для осуществления непрерывных законов регулирования используются регуляторы и контроллеры с непрерывным стандартным выходным сигналом. За основу алгоритма управления в таких устройствах принимают ПИД-закон, который позволяет, манипулируя настройками, реализовать любой закон регулирования, требуемый в данной САР
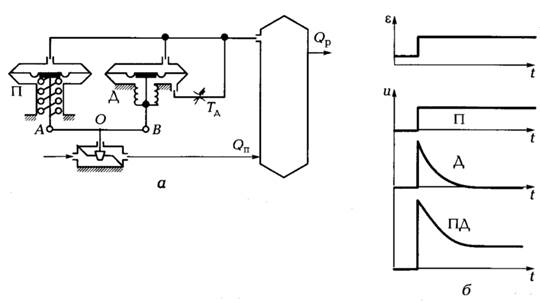
Рисунок 5 – ПД-регулятор
а – схема регулятора; б -временная характеристика
Контрольные вопросы
1 Дать определение закону регулирования
2 Какой закон называют П-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример П-регулятора
3 Какой закон называют И-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример И-регулятора
4 Какой закон называют ПИ-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПИ-регулятора
5 Какой закон называют ПД-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПД-регулятора
6 Какой закон называют ПИД-законом регулирования? Привести уравнение зависимости выходного сигнала от входного, график переходного процесса и пример ПИД-регулятора