Это регуляторы, у которых скорость перемещения регулирующего органа пропорциональна как отклонению регулируемой величины, так и скорости изменения этого отклонения.
Сравнение П-регуляторов и И-регуляторов показывает, что первые обладают преимуществом по динамическим свойствам и обеспечивают лучший переходный процесс регулирования; преимущество вторых — отсутствие статической ошибки, т. е. лучшие статические свойства.
Пропорционально-интегральные регуляторы (ПИ-регуляторы) называются также изодромными от греческого слова «изодром», означающего «равный бег». Это объясняется тем, что впервые они были применены на паровых машинах, где обеспечивали постоянную скорость вращения вала при любых нагрузках.
Принцип работы ПИ-регулятора можно проиллюстрировать, условно объединив два рассмотренных ранее регулятора (рис. 4, а): при падении давления газа в сборнике точка А П-узла регулятора быстро смещается вверх пропорционально отклонению давления, поворачивая рычаг АВ относительно точки В. Точка О и затвор соответственно перемещаются вверх, увеличивая приток газа в сборник. В тот же момент точка В И-узла начинает перемещаться вверх со скоростью, пропорциональной уменьшению давления, дополнительно увеличивая приток. Таким образом, сначала П-узел выполнит главную задачу — восстановит равновесие между притоком и расходом газа, затем И-узел полностью ликвидирует отклонение давления от заданного значения.
 Работа ПИ-регулятора понятна и из его временной характеристики (рис. 16, б).
Работа ПИ-регулятора понятна и из его временной характеристики (рис. 16, б).
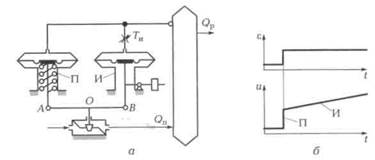
Рисунок 4 – ПИ-регулятор
А – схема регулятора; б -временная характеристика
С помощью этого регулятора можно реализовать каждый из рассмотренных ранее законов регулирования.
Закон регулирования ПИ-регулятора имеет вид

где S1 и S0 — настроечные параметры регулятора, S1 = Кр, S0 = 1/Tи, Tи — время изодрома регулятора.
Под временем изодрома принято понимать время, в течение которого под действием интегральной составляющей выходная величина регулятора удвоит свое значение, полученное за счет действия пропорциональной составляющей. Поэтому время изодрома называют также временем удвоения.
Пропорционально-интегральные регуляторы объединяют в себе достоинства, имеющиеся как у пропорциональных, так и у интегральных регуляторов. Отрицательные свойства первых регуляторов перекрываются положительными свойствами вторых. Регулятор поддерживает постоянное значение регулируемой величины вне зависимости от нагрузки объекта, а при отклонении ее от заданного значения в начальный момент времени переместит регулирующий орган на величину, пропорциональную величине отклонения (как П-регулятор), затем продолжит перемещение регулирующего органа до исчезновения статической ошибки, т. е. приведет регулируемую величину к заданному значению.
ПИ-регулятор действует быстрее, чем И-регуляторы, но медленнее, чем П-регуляторы. Этот регулятор является универсальным, т.е., используя его, можно реализовать каждый из рассмотренных ранее законов регулирования. ПИ-регуляторы широко применяются для поддержания самых различных технологических параметров во всех отраслях промышленности. Они могут применяться в тех случаях, когда необходима высокая точность регулирования, для объектов любой емкости как при наличии, так и при отсутствии самовыравнивания, при больших, но плавных изменениях нагрузки