Для исследования сложных систем, которые описываются дифференциальными уравнениями высоких порядков, а их структурные схемы содержат цепи обратных связей, в системе MATLAB используется пакет CONTROL. Пакет CONTROL предоставляет широкий набор процедур, осуществляющих анализ систем с обратными связями, например, систем управления, адаптивных систем радиодоступа и др. Программные средства пакета позволяют исследовать такие системы с самых различных точек зрения и, прежде всего, определять отклики систем на внешние воздействия, как во временной, так и в частотной областях.
Для нахождения временных откликов системы на типовые виды внешних воздействия (испытательных сигналов) предусмотрены следующие функции:
- impulse – нахождение отклика системы на единичное импульсное входное воздействие;
- step – нахождение реакции системы на единичный скачок входного воздействия.
Исследование быстродействия системы предполагает моделирование ее реакции на ступенчатое воздействие, которое резко, теоретически мгновенно, должно перевести систему из одного установившегося (статического) состояния в другое. При этом из-за конечного быстродействия системы наблюдается переходный процесс, описываемый переходной функцией. По виду графика переходной функции можно оценить качество переходного процесса и, следовательно, быстродействие системы. Показателями качества переходного процесса являются следующие величины:
1 Время затухания переходного процесса – время регулирования  , по истечении которого выходная величина отклоняется от установившегося значения не более чем на 5 %.
, по истечении которого выходная величина отклоняется от установившегося значения не более чем на 5 %.
2 Период колебаний  , т.е. промежуток времени между двумя последовательными максимумами в переходной функции, а также круговая частота свободных колебаний
, т.е. промежуток времени между двумя последовательными максимумами в переходной функции, а также круговая частота свободных колебаний  , определяемая из выражения
, определяемая из выражения
 . (1)
. (1)
3 Время перехода системы в установившийся режим  , и время нарастания переходной функции
, и время нарастания переходной функции  .
.
4 Время возникновения 1-го, 2-го, и т.д. выбросов переходного процесса -  ,
,  , и т.д.
, и т.д.
5 Относительная величина максимального выброса переходного процесса или перерегулирование:
 ; (2)
; (2)
6 Число колебаний за время переходного процесса.
Быстродействие системы характеризуется временем переходного процесса .
Рассмотрим методику исследования быстродействия в MATLAB на примере сложной динамической системы, которая представлена передаточной функцией с использованием средств пакета имитационного моделирования CONTROL. Имитационная модель сложной динамической системы представлена на рисунке 10.21. Методика составления имитационных моделей систем в среде MATLAB с помощью библиотеки SIMULINK было рассмотрено выше.

Рисунок 10.21 – Имитационная модель сложной динамической системы в среде MATLAB
Для исследования быстродействия системы необходимо воспользоваться обозревателем LTI-объектов, в котором можно в интерактивном режиме строить характеристики системы во временной и частотной областях. Для вызова обозревателя LTI-объектов необходимо в строке меню окна модели выбрать команду Tools – Linear analysis. При этом появятся два окна, как это показано на рисунке 10.22. Далее нужно из окна Model Inputs and Outputs перетащить блоки Input point и Output point в окно модели.

Рисунок 10.22 – Окно LTI-обозревателя и окно блоков Inputs and Outputs
Для исследования системы при помощи LTI-обозревателя необходимо исследовать нашу систему в разомкнутом виде, т.е. разомкнуть обратную связь и присоединить блоки Input point и Output point к соответствующим линиям, как это показано на рисунке 10.23.
Запустим процесс моделирования, воспользовавшись управляющей кнопкой Start simulation (пуск) панели инструментов окна модели.
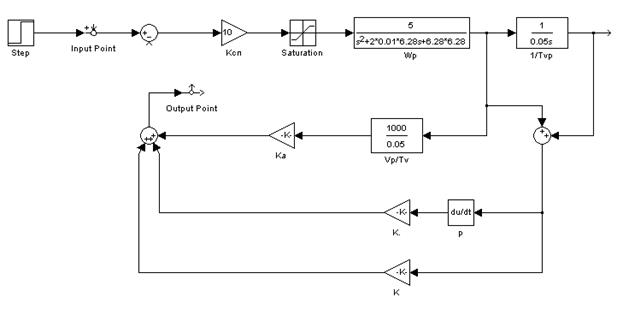
Рисунок 10.23 – Имитационная модель сложной динамической системы в разомкнутом состоянии
Далее в строке меню окна LTI-обозревателя необходимо выбрать и отдать на исполнение команду Simulink – Get Linearized Model (запуск линейной модели). При положении курсора в окне изображения графика и нажатии ПКМ на экране появится всплывающее меню. В нем выберем команду Plot Type-Step и отдадим на исполнение нажатием ЛКМ. В результате проделанных действий в графическом окне должно появиться изображение переходной функции, приведенное на рисунке 10.24.
Как видно из графика переходной функции (Рис.10.24), время переходного процесса в сложной динамической системе при заданных параметрах ее динамических звеньев составляет  сек. Переходная функция гладкая и имеет экспоненциальных характер.
сек. Переходная функция гладкая и имеет экспоненциальных характер.

Рисунок 10.24 – Переходная функция сложной динамической системы