МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ДОНЕЦКИЙ НАЦИОНАЛЬНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
к выполнению лабораторных работ по курсу
"ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ"
ЧАСТЬ II
(для студентов специальности 7.092501 АУП)
Утверждено
на заседании кафедры
автоматики и телекоммуникаций
Протокол № 6 от 21.05.2003г.
Утверждено на заседании учебно-издательского совета ДонНТУ
Протокол № от 2003г.
Донецк, ДонНТУ 2003 г.
УДК 62-52 (071)
Методические указания к выполнению лабораторных работ по курсу "Теория автоматического управления", Ч. II (для студентов специальности 7.092501 АУП) / Сост.: В.Н. Ткаченко, В.А. Попов, Р.В. Федюн - Донецк: ДонНТУ, 2003.- 33 с.
Содержат краткие сведения из теории, методику выполнения лабораторных работ № 6 -. Порядок оформления отчета, список рекомендуемой литературы.
Составители: В.Н. Ткаченко, проф.
В.А. Попов, доц.
Р.В. Федюн, доц.
Отв. за выпуск В.И. Бессараб, доц.
Л А Б О Р А Т О Р Н А Я Р А Б О Т А 6
ИССЛЕДОВАНИЕ ТОЧНОСТИ ЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Ц Е Л Ь Р А Б О Т Ы- экспериментальное определение показателей точности линейных систем автоматического управления.
6.1. краткие сведения из теории
Назначение любой автоматической системы управления - изменение выходной величины y(t) в соответствии с изменением задающего воздействия x(t). В большинстве случаев эта задача системы заключается в поддержании равенства
 (6.1)
(6.1)
при любых изменениях задающего и возмущающих воздействий.
При анализе точности различают две функции системы: воспроизведение задающего воздействия и подавление (компенсация) возмущений. Из-за инерционности объекта и регулятора обе эти функции выполняются любой реальной системой с погрешностью: в каждый момент времени после внешнего воздействия существует разность
 (6.2)
(6.2)
характеризующая точность системы. Чем меньше мгновенные значения сигнала ошибки  , тем больше (лучше) точность системы.
, тем больше (лучше) точность системы.
Рассмотрим характеристики точности типовой одноконтурной системы, алгоритмическая схема которой приведена на рис. 6.1.
|
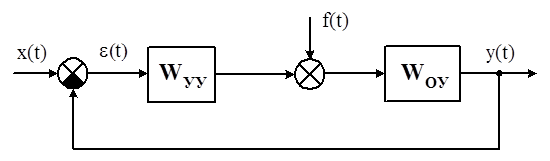
В приведенной схеме (рис.6.1) сигнал ошибки , определяемый выражением (6.2), действует на входе управляющего устройства, которое описывается передаточной WУУ(p). На входе объекта управления с передаточной функцией WОУ(p) действует выходной сигнал управляющего устройства, который суммируется с возмущающим воздействием f(t).
Сигнал ошибки состоит из двух составляющих:
 , (6.3)
, (6.3)
где  - составляющая сигнала ошибки, обусловленная изменением задающего воздействия;
- составляющая сигнала ошибки, обусловленная изменением задающего воздействия;
 - составляющая сигнала ошибки, обусловленная изменением возмущающего воздействия.
- составляющая сигнала ошибки, обусловленная изменением возмущающего воздействия.
Составляющая характеризует точность выполнения системой функции воспроизведения задающего воздействия, составляющая характеризует точность выполнения системой функции подавления возмущающих воздействий.
Вычисление мгновенных значений сигнала ошибки и его составляющих при произвольном законе изменения внешних воздействий представляет собой сложную задачу. Поэтому точность систем принято оценивать по значениям и в статическом и установившемся динамическом режимах работы системы. Соответственно различают статическую и динамическую точности.
6.1.1. СТАТИЧЕСКАЯ ТОЧНОСТЬ
В статическом режиме ошибки возникают только в статической системе, а в астатической системе они равны нулю, поэтому статическую точность оценивают только при анализе статических систем. Статической системой управления называется система, объект и управляющее устройство которой являются статическими элементами, т.е.  и
и  .
.
Установившееся значение сигнала ошибки статической системы определяется выражением:
 (6.4)
(6.4)
Первое слагаемое в правой части уравнения (6.4) характеризует статическую ошибку по задающему воздействию, второе - статическую ошибку по возмущению. Обе эти ошибки тем больше, чем больше внешние воздействия x и f, и тем меньше, чем больше знаменатель (1+kУУ kОУ).
6.1.2. динамическая ТОЧНОСТЬ
Динамическую точность систем оценивают по величине сигнала ошибки в установившемся динамическом режиме. Установившийся динамический режим наступает после окончания переходного процесса. В этом режиме управляемая величина и сигнал ошибки имеют только вынужденную составляющую.
В зависимости от свойств системы и от точки приложения внешнего воздействия вынужденная составляющая сигнала ошибки либо равна постоянной величине, либо неограниченно возрастает. Постоянную вынужденную составляющую можно определить при помощи теоремы о конечном значении оригинала:
 , (6.5)
, (6.5)
где  - изображение сигнала ошибки.
- изображение сигнала ошибки.
Установившиеся значения составляющих сигнала ошибки и для ряда распространенных случаев приведены в таблице 6.1.
Таблица 6.1.
| Составляющая сигнала ошибки | Порядок астатизма | Вид воздействия | ||

| 
| 
| ||
|
| 


| 
| 

|

|
|
|  ; ;  ;
; 
 ;
; ;
;
 ; ;
|  
|
|

|
6.2. Порядок ВЫПОЛНЕНИЯ РАБОТЫ
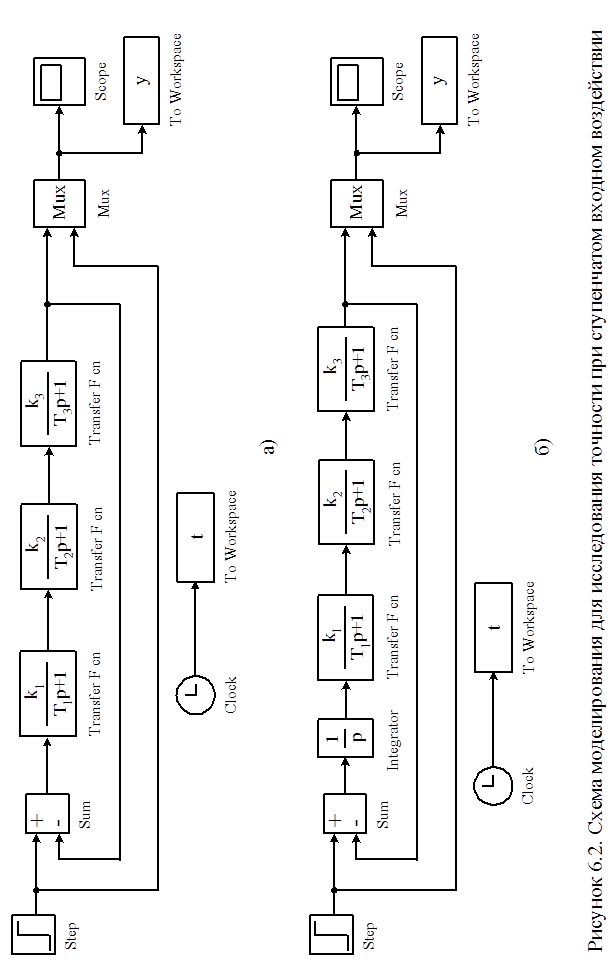
1. Собрать схему моделируемой системы согласно рис. 6.2,а.
2. Установить следующие коэффициенты передаточных функций элементов системы k1 = 2, k2 = k3 = 1, T1 = 0,7 c, T2 = 0,3 c, T3 = 0,05 c. Время моделирования установить 5 с.
3. Выполнить моделирование. По полученному графику переходного процесса определить установившееся значение сигнала ошибки при ступенчатом изменении задающего воздействия x(t) = 1(t). Зарисовать график переходного процесса.
4. Исследовать влияние коэффициента передачи разомкнутого контура на величину сигнала ошибки. Для этого получить графики переходных процессов и определить величину сигнала ошибки для случаев: k1 = 0.8 и k1 = 4,5. Зарисовать графики.
5. Исследовать точность системы с астатизмом первого порядка при ступенчатом задающем воздействии. Для этого собрать схему моделирования, приведенную на рис. 6.2,б. Параметры моделирования такие же, как и в пункте 2, за исключением времени моделирования, которое необходимо установить 20 с. Выполнить моделирование, зарисовать график переходного процесса, определить установившееся значение сигнала ошибки.
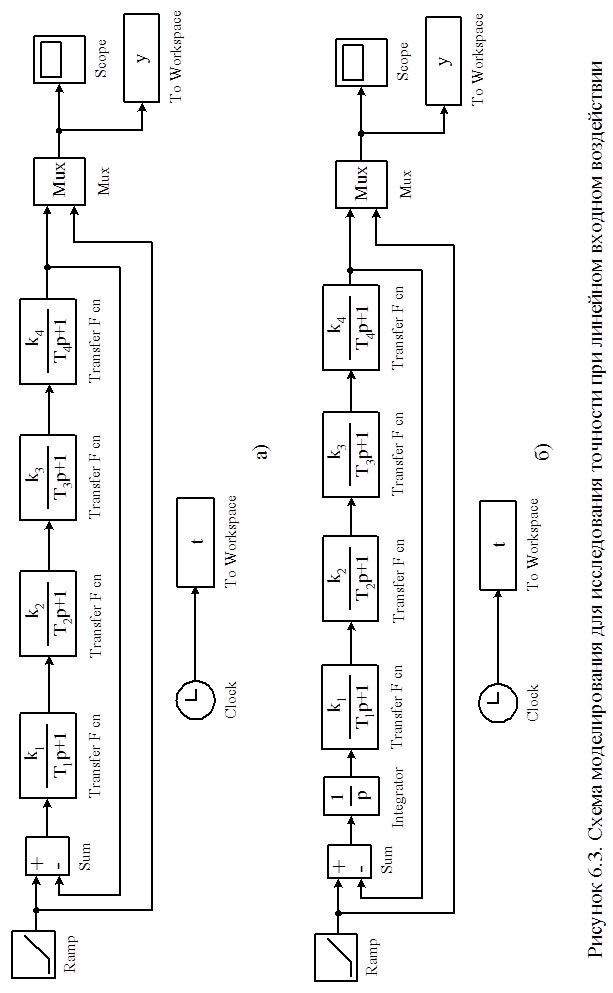
6. Исследовать показатели точности статической системы управления при линейном задающем воздействии x(t) = 0,5 t 1(t). Для этого собрать схему моделирования согласно рис. 6.3,а со следующими параметрами k1 = 0.8, k2 = k3 = k4 = 1, T1 = 0,7 c, T2 = 0,3 c, T3 = 0,05 c, T4 = 0,01 c. Время моделирования 20 с. Выполнить моделирование, зарисовать график переходного процесса, определить установившееся значение сигнала ошибки.
7. Исследовать показатели точности системы с астатизмом первого порядка при линейном задающем воздействии x(t) = 0,5 t 1(t). Для этого необходимо собрать схему, представленную на рис. 6.3,б, установив такие же параметры, как и в пункте 6. Выполнить моделирование, зарисовать график переходного процесса, определить установившееся значение сигнала ошибки.
8. Исследовать влияние коэффициента передачи разомкнутого контура на величину сигнала ошибки. Для этого получить графики переходных процессов при линейном задающем воздействии x(t) = 0,5 t 1(t) и определить величину сигнала ошибки для случаев: k1 = 0.4 и k1 = 2. Зарисовать графики.
9. Для исследований, предусмотренных пунктами 3 - 8 рассчитать теоретические значения сигнала ошибки и сравнить их с экспериментальными значениями. Сделать выводы.
6.3. Содержание отчета
Отчет о лабораторной работе должен содержать:
1. Краткое описание задачи и метода исследования.
2. Схемы моделирования.
3. Графики переходных процессов по каждому пункту исследований.
4. Показатели точности, определяемые по кривым переходных процессов.
5. Теоретические значения показателей точности.
6. Выводы по работе с анализом результатов исследований и расчетов.