Введение
В лекции по Кинематике мы говорили о том, что кинематика - это раздел механики, причем этот раздел не изучает причины движения. Фактически Кинематика - это математический аппарат механики. Мы изучали Кинематику, сумели решить основную задачу механики, если нам известно ускорение тела. Допустим ускорение тела равно нулю, то мы имеем равномерное прямолинейное движение. Если ускорение равно нулю, значит скорость постоянна по величине и по направлению. Мы можем найти координату в любой момент времени. Так же знаем, если ускорение - постоянная векторная величина, то такое движение является равноускоренным. Если ускорение постоянно и перпендикулярно скорости, то тело движется по окружности. Таким образом, зная ускорение, мы можем решить задачу во многих случаях. И также самую главную задачу механики. Кинематика, как мы поняли не вдается в причины того почему произошло движение, но раз мы заговорили об ускорении то это не просто так. Из определения ускорения, а мы знаем что ускорение - это быстрота изменения скорости, а вот по каким причинам у нас изменяется скорость, мы пока не знаем и это знание дадут нам инструменты динамики. Основная задача Динамики - это найти ускорение, если известны условия его движения. Вот этим мы будем заниматься, то есть мы будем выяснять, что является причиной изменения скорости. Все …кинематика свое дело сделала, переходим к динамике, а именно к ее основным понятиям и законам. И в лекции рассмотрим:
Тема лекции: Алгоритмический подход к решению физических задач по разделу «Динамика»
Цель: выполнить обзор составных элементов для создания алгоритма решения задач по разделу «Динамика», учебного предмета «Механика» на уровне понимания.
Задачи:
Воспитательные:
· Стремиться к воспитанию чувства гуманизма, коллективизма, уважения к старшим, чувства субординации, чувства такта, стремление к дисциплине.
· Стремиться воспитать чувство гордости за избранное направление подготовки.
Образовательные:
· Создать условия для актуализации общего плана решения задач по физике
· Создать условия для введения определения силы, для графического представления сил или системы сил действующих на тело или несколько тел и их изображения.
· Создать условия для сравнения инерциальной системы отсчета от неинерциальной с помощью демонстрационного опыта и введения определения Первого закона Ньютона.
· Создать условия для демонстратрации опыта подтверждения независимости произведения ma от каких либо фактором кроме как условия взаимодействия, а так же введения математического вида закона Ньютона и равнодействующей.
· Создать условие для понимания структурных элементов и сбора воедино структурных элементов алгоритма на примере решения задачи №1, если позволяет время то и №2.
· Подвести итоги лекции результатом, которой должен быть Алгоритм решения задач по Динамике.
Развивающие:
· Продолжение развития структурных компонентов алгоритмического мышления таких, как: «разбиение большой задачи на малые», понимание и использование формальных способов записи решении (составление алгоритма).
· Продолжение развития структуры мышления предполагающей умение создать алгоритм.
План лекции:
· Сила, как мера взаимодействия. Сила трения. Сила реакции опоры. Сила тяжести. Сила упругости. Вес тела.
· Система отсчета. Первый закон Ньютона
· Второй закон Ньютона. Равнодействующая.
· Второй закон Ньютона.
· Этапы решения задач по Динамике
· Подведение итогов.
· Литература
Сила, как мера взаимодействия.Сила трения. Сила реакции опоры. Сила тяжести. Сила упругости. Вес тела.
Сила, как мера взаимодействия https://youtu.be/P_grlLAPn4s (дата обращения 14.01.2022)
Обозревать этапов алгоритма начнем с основных сил, действующих на тело: Сила трения, Сила реакции опоры, Сила тяжести, Сила упругости, Вес тела.
Сделаем это с помощью плана изучения физической величины и оформим в таблицу
| Название | Обозначение | Формула Графическое представление | Online работа с формулой |
| Сила трения | F_тр - сила трения μ - коэффициент трения N - сила тяжести | 

| https://www.indigomath.ru/formuly-po-fizike/dinamika/sila-trenija.html |
| Сила трения качения | F_тр - сила трения качения μ - коэффициент трения качения N - сила тяжести R - радиус | 

| https://www.indigomath.ru/formuly-po-fizike/dinamika/sila-trenija-kachenija.html |
| Сила трения | F_тр - сила трения μ - коэффициент трения m - масса g - ускорение свободного падения | 

| https://www.indigomath.ru/formuly-po-fizike/dinamika/sila-trenija-2.html |
| Сила тяжести | N - сила тяжести m - масса g - ускорение свободного падения | 
 
| https://www.indigomath.ru/formuly-po-fizike/dinamika/sila-tjazhesti.html |
| Вес тела | P - вес m - масса g - ускорение свободного падения | 

| https://www.indigomath.ru/formuly-po-fizike/dinamika/ves-tela.html |
| Вес тела: невесомость | Вес тела, когда ускорение тела совпадает по направлению с ускорением свободного падения P - вес m - масса g - ускорение свободного падения a - ускорение | 
| https://www.indigomath.ru/formuly-po-fizike/dinamika/ves-tela-nevesomost.html |
| Вес тела: перегрузка | Вес тела, когда ускорение тела противоположно направлению ускорения свободного падения P - вес m - масса g - ускорение свободного падения a - ускорение | 
| https://www.indigomath.ru/formuly-po-fizike/dinamika/ves-tela-peregruzka.html |
| Сила упругости | F_упруг - сила упругости k - жёсткость x - удлинение (сокращение) предмета | 

| https://www.indigomath.ru/formuly-po-fizike/dinamika/sila-uprugosti.html Сила упругости (F yпp) направлена противоположно перемещению частиц при деформации |
| Сила реакции опоры | N - сила тяжести m - масса g - ускорение свободного падения |
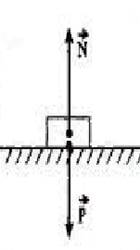
| Сила реакции опоры (N) всегда перпендикулярна опоре. |
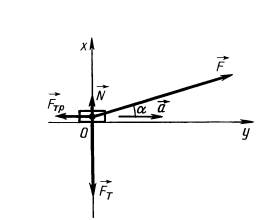
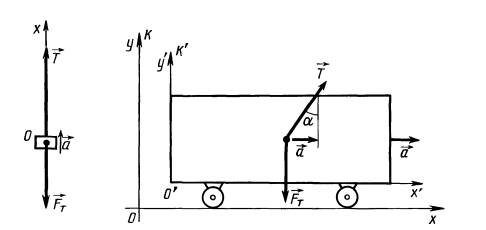
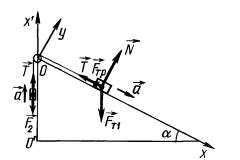
Приведем примеры расстановки сил на рассматриваемых в задачах телах. Вот равнодействующая - это сумма всех сил действующих на тело. На рисунке так же есть сила натяжения нити (Т) - Сила натяжения нити (T) всегда направлена вдоль оси подвеса и ее всегда уточнят при дальнейшем решении, так же как и сила трения.
Далее для следующего этапа решения задач необходимо выбрать систему отсчета – СО. Перейдем к следующему понятию и закону.
Система отсчета. Первый закон Ньютона
В Кинематике все системы отсчета равноправны и выбор, какой-нибудь из них падает на более удобную. В динамике, законы управляющие движением, меняются при переходе из одной системы отсчета в другую и выбор СО так же исходит из удобства решения задач. Рассмотрим инерциальную СО.
Инерциальная система отсчета
Итак существуют системы отсчета называемые инерциальными, в которых любое тело, свободное от действия других тел, покоиться или движется равномерно и прямолинейно. Выделяют инерциальную систему отсчета по действию в ней закона инерции - первого закона Ньютона.
Как на практике понять, что инерциальные системы отсчета существуют. Для этого достаточно взять изолированное тело и проследить его движение в различных системах координат, не связанных с ним. Если среди них мы пронаблюдаем равномерное, прямолинейное движение, то такая система будет инерциальной. Для этого необходимо чтобы все движущиеся тела не взаимодействовали и такое возможно в космосе, когда расстояния между телами огромные и их взаимодействие сведено к нулю.
Как пример свяжем систему отсчета с несколькими неподвижными (друг относительно друга) звездами и проследив за движением в ней других изолированных небесных тел, можно убедиться в выполнении закона инерции. В инерциальных системах отсчета Если данное условие не выполняется, то значит это другая система отсчета: неинерциальная. Неинерциальная система отсчета
Все силы в механике не зависимо от своей природы имеют общее проявление. Действуя на любой изолированный объект, они вызывают ускорение, и движение точки уже будет равноускоренным или равнозамедленным. И тогда актуальна неинерциальная система отсчета.
Во всех системах СО действуют законы Ньютона, а так же основные силы: сила тяжести, сила упругости, сила трения.
Приведем примеры и анализ демонстрации:

Проведем небольшой анализ. Подвесим шар на пружине, и пусть он придет в состояние равновесия. Его скорость равна нулю и она постоянна. И мы наблюдаем, что рядом находится тела которые никаким образом не меняют состояние данной системы, то шар как покоился, так и будет покоиться. В таком случае говорят, что данное тело не взаимодействует с другими телами.
Другое дело если рядом находится тела, которые влияют на состояние покоя шара и тем более, если присутствуют тела, которые выводят из состояния покоя данную систему, и скорость нашего шара уже не будет равняться нулю. Пусть этим телом будет земля. Тогда шар будет двигаться вниз для того чтобы действия земли перевесило действия силы упругости пружины,необходимо пружину убрать и тогда наш шар полетит вниз и естественно у него будет изменение скорости. А если мы уберем землю, то шар будет двигаться вверх, и также будет изменения скорости. Впрочем действие пружины на этот шар у меня оказывается, что взаимодействие пружины на шар зависит от того насколько сильно натянута пружина. Если натяжение пружины уменьшить, то она будет действовать слабее, чем действует земля, если отпустить шар, шар начнет двигаться вниз к земле и наоборот. Можно искусственно усилить действие пружины на шар, теперь если отпустить шар, то хотя земля и присутствует, но ее действия в таком случае говорят что действием пружины скомпенсировано. И мы можем наблюдать за этим шаром с любой системой отсчета, но в любой системе отсчета он будет двигаться равномерно и прямолинейно либо быть в состоянии покоя и действия всех сил на него скомпенсировано. Если проехать около этого шара на мотоцикле с большим изменением скорости, то будет создаваться такое впечатление, что шар также движется с измененной скоростью, и таким образом у нас уже не будет равномерного движения, и шар не будет находиться в покое система отсчета связанной с мотоциклом.
Исходя из приведенного примера, запишем первый закон Ньютона так:
Существуют такие системы отсчета(в инерцианальных системах отсчета), относительно которых материальные точки, когда на них не действуют никакие силы, находятся в состоянии покоя (действие всех сил скомпенсировано) или равномерного прямолинейного движения.
Данный закон, как аксиома в геометрии - принимается без доказательства.
Если в СО справедлив первый закон Ньютона, то СО инерциальная, СО связанная с мотоциклом неинерциальная. В неинерциальных СО система не сохраняет свою скорость и актуальность второго закона Ньютона возрастает. Применение второго закона Ньютона, это так же этап решения задач по динамике. Сколько тел в задаче, столько раз применяем второй закон Ньютона.
Второй закон Ньютона. Равнодействующая.
Изменение скорости в СО возникает в результате взаимодействия. Мерой взаимодействия является сила. Значит между ускорением и мерой взаимодействия существует прямая зависимость: F~a.
Для того чтобы поставит знак равенства введем массу m, как коэффициент пропорциональности: F=ma.
Таким образом, мы получили математическое представление второго закона Ньютона, который звучит: Сила, действующая на тело, равна произведению массы тела на его ускорение сообщаемое этой силой.
Подтвердим с помощью небольшого наглядного эксперимента. Цель которого показать, что величина взаимодействия тележки (тележек) с пружиной обладает общей характеристикой взаимодействия и то что произведение ma от тела не зависит.
| № | S м | /t с | 
| Масса тележки | F = ma |
| 0,91 | 2,75 | 
| m | ma | |
| 0,91 | 3,88 | 
| 2m | 2m*(a/2) = ma | |
| 0,91 | 0.04 | 3m | 3m*(a/3) = ma |
В трех случаях мы получили ma = F
Как будет выглядеть этот закон, если на тело действуют несколько сил.?
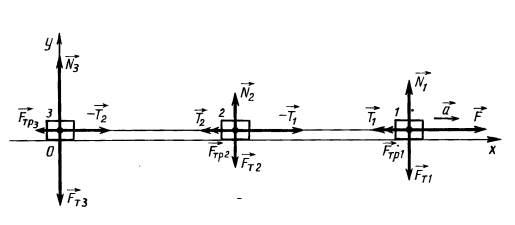
Если на тело действует несколько сил, то их всех можно заменить одной – Равнодействующей.
Равнодействующая (Сила упругости, Сила реакции опоры, Сила тяжести, Сила трения)
Сила указанная во втором законе Ньютона - это ни одна сила, а несколько сил, о которых, мы говорили в начале лекции. Потому что для изменение скорости необходимо взаимодействие тела с одним или несколькими телами поэтому равнодействующая - это сумма всех сил действующих на тело. Если мы можем найти равнодействующую, то также мы можем использовать закон Ньютона, то есть мы можем найти ускорение выяснить причину этого ускорения. Равнодействующая может состоять из векторной суммы следующих сил: Сила упругости, Сила реакции опоры, Сила тяжести, Сила трения. Далее рассмотрим третий закон Ньютона.
Третий закон Ньютона .
Мы познакомились с первым и вторым законами Ньютона и теперь рассмотрим третий закон Ньютона.
1 закон Ньютона вот такие системы отсчета, в которых тело сохраняет состояние покоя, либо равномерного прямолинейного движения, если равнодействующая всех приложенных к нему сил равна 0.
2 закон Ньютона звучит так: равнодействующая всех сил приложенных к телу равна произведению его массы на ускорение.
3 закон Ньютона - это такой закон, который утверждает, что любое влияние тел друг на друга всегда является взаимным. Речь идет про силы, которая приложены, очевидно, к разным тела равны по величине противоположным по направлению также действует вдоль одной прямой и являются силами одной природы и одного типа. Математическое представление закона выглядит так: F=-F
(Каждому действию – свое противодействие).
Пример: любой предмет, лежащий на столе.
Законы Ньютона были сформулированы нами для тел пренебрежимо малых размеров, то есть материальных точек, однако они позволяют рассчитывать движение и протяженных объектов. Потому что каждый объект состоит из большого числа материальных точек, взаимодействующих друг с другом и с остальными телами. К каждой из этих точек могут быть применены все законы Ньютона. Законы Ньютона так же являются системой аксиом, служащих фундаментом всей классической механики.
Итак, рассмотрев основные понятия и законы Динамики, переходим к формированию этапов решению задач по Динамике.
Далее соберем воедино этапы решения задач по динамике и уточним детали. Сделаем это на примере решения предложенных задач.