Общие понятия
Задача синтеза плоских рычажно-шарнирных механизмов с низшими парами сводится к определению размеров звеньев, главным образом, расстояния между центрами шарниров. При этом размерная кинематическая цепь должна обеспечивать закон движения звеньев, положения последних в определенные моменты времени, траектории точек, соотношения скоростей различных точек или звеньев и т.д., предусмотренные в заданиях к проекту.
Для проектирования стержневых механизмов могут быть заданы:
1) ход ведомого звена (ползуна или коромысла);
2) коэффициент изменения средней скорости перемещения ведомого звена К;
3) максимальные допустимые углы давления в кинематических парах – α;
4) соответствующие крайние положения ведущего и ведомого звеньев и др. Коэффициент К определяется как отношение времени (или скорости) перемещения ведомого звена в одном направлении к времени перемещения (или скорости) того же звена и в обратном направлении при равномерном вращении ведущего звена.
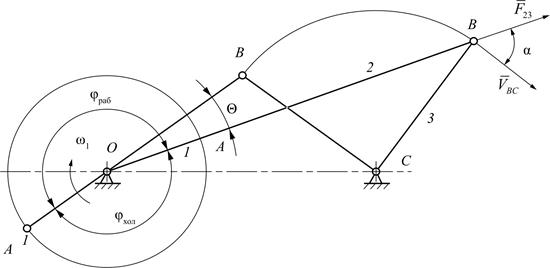
Коэффициент К можно выразить через углы поворота кривошипа φхол и φраб (рис. 2.1, а), соответствующие прямому и обратному ходу ведомого звена. Угол θ образован крайними положениями шатуна.
 (2.1)
(2.1)
 (2.2)
(2.2)
Углом давления α называют угол между вектором силы и вектором скорости точки приложения этой силы (рис. 2.1, а, б)
а

б
Рис. 2.1. Определение углов поворота кривошипа и угла давления:
а – шарнирный четырехзвенник; б – кривошипно-ползунный механизм
При увеличении угла давления α уменьшается КПД механизма и возникает возможность заклинивания звеньев. Поэтому при проектировании механизмов необходимо обеспечить условие, чтобы в любом его положении текущие значения угла давления не превышали допускаемого значения α.
Проектирование шарнирного четырехзвенника
1. Заданы длина коромысла ВС и расстояние между центрами коромысла и кривошипа ОС. Известны крайние положения коромысла, расположенные симметрично относительно направления, перпендикулярного линии центров ОС (рис. 2.2).
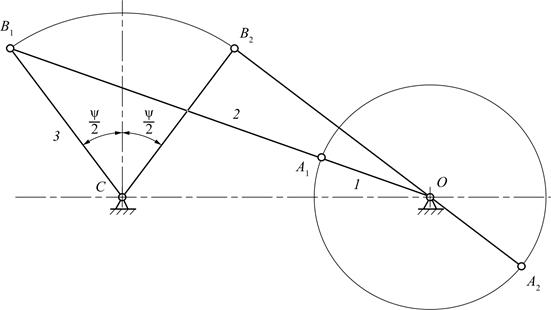
Рис. 2.2. Схема шарнирного четырехзвенника
Определить длины кривошипа ОА и шатуна АВ.
Для определения длины кривошипа соединим крайние положения точки В с центром шарнира О. Искомая длина ОА и АВ определится из соотношения
 , (3.3)
, (3.3)
откуда
 . (3.4)
. (3.4)
Если при заданном расстоянии ОС положение точки О относительно коромысла неизвестно, его можно выбрать произвольно, зная длину АВ.
2. Заданы положения коромысла и коэффициент К изменения средней скорости.
Недостающие размеры звеньев определяются положениями шарнирных точек О и А (рис. 2.3).
Положение точки О определяется значением угла θ (см. рис. 2.3). Точка О лежит на дуге NB 1 B 2 окружности, являющейся геометрическим местом вершин угла θ, опирающегося на хорду В 1 В 2. Центр этой окружности (точка D) находится на середине гипотенузы прямоугольного треугольника В 1 NВ 2, построенного на хорде В 1 В 2.
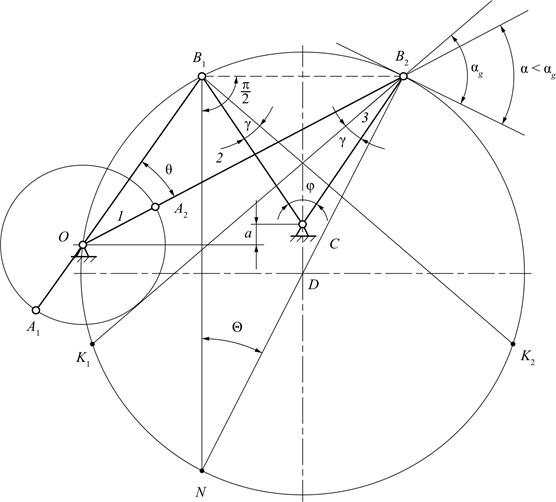
Рис. 2.3. Определение крайних положений
кривошипно-шарнирного четырехзвенника
Положение точки О на дуге окружности  может быть ограничено лишь значением угла давления в крайних положениях.
может быть ограничено лишь значением угла давления в крайних положениях.
Если задан угол α g, центр О следует выбирать на дугах В 1 К 1 либо В 2 К 2. Точки К 1 и К 2 определятся, если к направлениям коромысла в крайних положениях провести лучи под углом  так, как это показано на рис. 2.3.
так, как это показано на рис. 2.3.
Данная задача имеет множество решений, если не задана длина одного из звеньев.