Управляемая величина и управляющий параметр для тягового генератора.
Прежде чем говорить об автоматическом управлении тяговыми генераторами, рассмотрим, что является для них управляемой величиной и управляющим параметром. Для тяговых генераторов управляемыми величинами могут быть мощность, пусковой ток, максимальное напряжение. Все эти величины пропорциональны напряжению тягового генератора Uг. Это напряжение, если пренебречь падением напряжения в якорной цепи и реакцией якоря, может быть определено по формуле:
где СГ — постоянная величина для данного генератора, определяемая числом пар полюсов и параметрами обмотки якоря.
Фг — магнитный поток полюсов тягового генератора, Вб;
nг — частота вращения якоря (ротора) тягового сенератора, об/мин.
Следовательно, для того чтобы получить требуемую форму внешней характеристики генератора, необходимо ток возбуждения изменять по определенному закону в зависимости от ряда факторов, влияющих на напряжение тягового генератора и мощность дизель-генераторной установки. Такое изменение тока возбуждения генератора на современных тепловозах выполняется при помощи САУ тяговым генератором.
Классификация САУ тяговыми генераторами
Система автоматического, управления тяговых генераторов включает автоматическое управление по току нагрузки, управление пусковым током и максимальным напряжением и управление мощностью по частоте вращения якоря.
Основным фактором, в зависимости от которого изменяется напряжение тягового генератора, является ток его нагрузки. Поэтому основная САУ тяговым генератором должна быть выполнена по току нагрузки. Именно эта САУ позволяет приблизить характеристику тягового генератора в заданном интервале токов нагрузки к гиперболической характеристике.
САУ тяговых генераторов по току нагрузки могут быть подразделены на САУ по возмущающему воздействию (разомкнутые системы) и САУ комбинированным методом, сочетающие управление по возмущающему воздействию и по отклонению управляемой величины.
При трогании тепловоза с места должно быть обеспечено oграничение пускового тока, а при малых токах нагрузки ограничение максимального напряжения. Автоматическое управление пусковым током тягового генератора осуществляется за счет применения замкнутой статической САУ по отклонению управляемой величины. Эти системы отличаются друг от друга характером зависимости ограничиваемого тока для различных позиций КМ с учетом необходимых тяговых свойств тепловоза.
Максимальное напряжение тяговых генераторов тепловозов ТЭ3, ТЭМ2, ТЭМ1 и др. ограничивается насыщением магнитной системы, и на этих тепловозах специальные системы управления максимальным напряжением отсутствуют. На тепловозах типа ТЭ10, а так же 2ТЭ116, ТЭП70, ТЭМ7 и др. применяются САУ максимальным напряжением. Здесь также используется замкнутое статическое управление по отклонению управляемой величины.
Работа тепловоза с пониженной мощностью и уменьшенными пусковым током и максимальным напряжением, как отмечалось выше, требует снижения частоты вращения валов дизель-генераторной установки путем уменьшения позиции КМ. Для реализации необходимой мощности тягового генератора на промежуточных позициях КМ служит САУ мощностью тягового генератора по частоте вращения якоря (ротора). При работе тепловоза имеет место ряд факторов (кроме тока нагрузки генератора), который влияет нa мощность генератора, а также на свободную мощность, передаваемую генератору от дизеля. Поэтому в дополнении к САУ тяговым генератором на современных тепловозах применяется САУ дизель-генератором по мощности.
Автоматическое управление тяговыми генераторами по току нагрузки
Управление по возмущающему воздействию. Такой принцип управления (рис. 2) применен на тепловозах ТЭЗ, ТЭМ2. ТЭМ1, ЧМЭЗ и др. Здесь объектом управления является тяговый генератор, регулятором — возбудитель со специальной системой расщепленных полюсов и нелинейной характеристикой (т.е. применена электромашинная САУ). Основным возмущающим воздействием для тягового генератора является ток нагрузки; сигнал по току нагрузки поступает в дифференциальную обмотку возбудителя. Узлом сумммирования сигналов является система возбуждения возбудителя. Управляемой величиной является напряжение тягового генератора.
Наряду с простотой, большим быстродействием, высокой динамической устойчивостью САУ тяговых генераторов по возмущающему воздействию имеют существенные недостатки: влияние температуры обмоток и гистерезиса электрических машин, а также напряжения вспомогательного генератора на напряжение и мощность тягового генератора; невозможность осуществления только за счет такой системы управления ограничением тока и напряжения тягового генератора; сложность настройки характеристики тягового генератора.
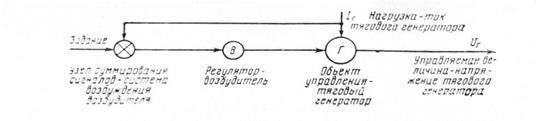
Рис. 5. Структурная схема автоматического управления тяговым генератором тепловозов ТЭЗ. ТЭМ2, ТЭМ1, ЧМЭЗ и др. по току нагрузки
Управление комбинированным методом. Более совершенный комбинированный метод управления тяговым генератором по току нагрузки, сочетающий управление по возмущающему воздействию и по отклонению управляемой величины, применяется на современных тепловозах типа ТЭ10, а также 2ТЭ116, ТЭП70, ТЭМ7 и др. Объектом управления здесь также является тяговый генератор, регулятором на тепловозах типа ТЭ10 (рис.3) — магнитный усилитель (амплистат возбуждения), на тепловозах 2ТЭ116, ТЭП70, ТЭМ7 и др. (рис. 4) управляемый выпрямитель возбуждения. Основным возмущающим воздействием для тягового генератора является ток его нагрузки, сигнал от которого подается в узел суммирования сигналов через трансформаторы ТПТ. Узлом суммирования сигналов на тепловозах типа ТЭ10 являются обмотки управления амплистата и селективный узел на тепловозах 2ТЭ116, ТЭП70, ТЭМ7 и др. — селективный узел. Управляемая величина — напряжение тягового генератора, сигнал по отклонению управляемой величины подается в узел суммирования сигналов через трансформатор постоянного напряжения TПН (этот сигнал служит главной обратной связью в замкнутой системе управления).
В узле суммирования сигналов сигналы силовой тяговой цепи (по току и напряжению тягового генератора) сравниваются с сигналами задания, получаемыми от бесконтактного тахометрического блока и индуктивного датчика объединенного регулятора (на тепловозах 2ТЭ116,ТЭП70,ТЭМ7, и др.бесконтактный тахометрический
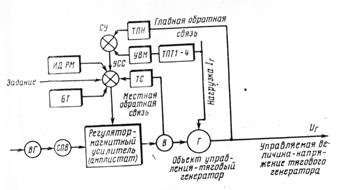
Рис. 6. Структурная схема комбинированного метода автоматического управления тяговым генератором тепловозов типа ТЭ10 по току нагрузки:
Г-—тяговый генератор; В — возбудитель; СП В —- синхронный подвозбудитель; ВГ — вспомогательный генератор; ТПН— трансформатор постоянного напряжения; ТПТ1-4 - трансформаторы постоянного тока; УВМ — узел выделении максимального сигнала; ТС - стабилизирующий трансформатор; СУ — селективный узел; УСС узел суммирования сигналов; ИД РМ — индуктивный датчик регулятора; БТ - бесконтактный тахометрический блок
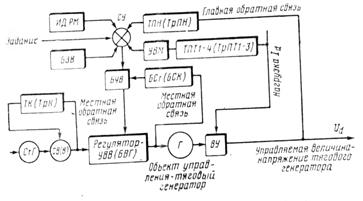
Рис. 7. Структурная схема комбинированного метода автоматического управления тяговым генератором тепловозов 2ТЭ116, ТЭМ7, ТЭП70 и др. по току нагрузки:
Г — тяговый генератор; СВ(В) — синхронный возбудитель; ВУ — выпрямительная установка; УЗВ(БВГ) — управляемый выпрямитель возбуждения; БУВ-блок управления выпрямителем; СтГ—стартер-генератор; БСт(БСК) --блок стабилизации; ТК(ТрК) - трансформатор коррекции; БЗВ — блок задания возбуждения; СУ - селективный узел; ИД РМ — индуктивный датчик регулятора; ТПН (ТрПН) — трансформатор постоянного напряжения; TJIT1—4 (ТрПТ 1—3) — трансформаторы постоянного тока; УВМ — узел выделения максимального сигнала; (в скобках указано обозначение для тепловозоэ ТЭП70)
блок называют «блоком задания возбуждения»). Сигнал, получаемый от бесконтактного тахометрического блока (блока задания возбуждения), пропорционален частоте вращения валов дизеля и служит для управления мощностью генератора по частоте вращения якоря (ротора). Сигнал от индуктивного датчика объединенного регулятора служит для управления дизель-генератором по мощности. В результате сравнения сигналов силовой тяговой цепи с сигналами задания вырабатывается сигнал рассогласования. На тепловозах типа ТЭ10 сигнал рассогласования определяет результирующее подмагничивание магнитного усилителя (амплистата возбуждения), а на тепловозах 2ТЭ116, ТЭП70, ТЭМ7 и др. - величину тока в обмотке управления магнитного усилителя блока БУВ, который управляет изменением угла управления тиристорами управляемого выпрямителя возбуждения УВВ. В конечном счете, на всех перечисленных тепловозах сигнал рассогласования в этой САУ определяет ток возбуждения тягового генератора и его напряжение. Зависимость напряжения тягового генератора от тока нагрузки, определяемая автоматическим управлением по току нагрузки, без связи с объединенным регулятором называется селективной характеристикой.
Рассмотренные выше структурные схемы относятся к тепловозам с динамической жесткой характеристикой тягового генератора по напряжению. Здесь в порядке некоторого уточнения надо отметить, что четыре трансформатора постоянного тока ТПТ1 — 4 подают в СУ через узел выделения наибольшего сигнала УВМ сигнал, пропорциональный наибольшему току ТЭД небоксующих колесных пар. Замкнутая САУ тяговых генераторов указанных тепловозе исключает влияние посторонних факторов на внешнюю характеристику тягового генератора (температура обмоток возбуждения, гистерезис и др.), отличается стабильностью в работе и гибкостью в настройке, обеспечивает ограничение пускового тока и максимального напряжения генератора.

Рис 8. Классификация САУ тяговых генераторов
ВЫВОД: В данной лабораторной работе мы ознакомились с методами возбуждения тягового генератора.
ЛАБОРАТОРНАЯ РАБОТА №4
ТЕМА: Автоматическое поддержание числа оборотов коленчатого вала дизеля
Цель работы: Ознакомится с конструкцией, принципом работы (автоматизацией) объединенного регулятора частоты вращения.