Электронные автопилоты
В связи с развитием и популяризаций электроники, аналоговые способы контроля за положением самолета начали дублироваться электронными, когда данные с датчиков подаются на ЦПУ, он их обрабатывает и принимает решение о том, куда надо направить самолет.
Расширение диапазонов изменения скоростей и высот полета привело к значительному изменению конструкции современных самолетов и связанному с этим ухудшению пилотажных характеристик. Поэтому появилась необходимость создания специальных автоматических систем, облегчающих пилотирование.
Различают три способа пилотирования: автоматическое, полуавтоматическое (директорное) и ручное.
Режим автоматического пилотирования характеризуется тем, что пилот находится вне контура управления. Он только наблюдает за сигналами устройств индикации и сигнализации, не перемещая рычагов управления. Перемещение органов управления осуществляется следящими приводами по сигналам автоматических устройств.
Режим полуавтоматического пилотирования характеризуется тем, что пилот берет на себя функции следящей системы. Наблюдая за нуль-индикаторами (директорными приборами) и перемещая рычаги управления, пилот отрабатывает сигнал рассогласования, формируемый полуавтоматическими устройствами.
Режим ручного пилотирования характеризуется тем, что пилот самостоятельно принимает решение и выполняет то или иное действие, перемещая рычаги управления. При этом он использует собственные наблюдения окружающей обстановки и принимает информацию, поступающую от штурмана, диспетчера и от устройств индикации и сигнализации.
В настоящее время система автоматического управления полетом превратилась из средства, только облегчавшего пилоту процесс пилотирования самолетом, в средство, обеспечивающее эффективную эксплуатацию современного самолета. Это привело к увеличению количества задач, решаемых бортовыми системами автоматического управления, усложнению методов проектирования, испытания и эксплуатации таких систем.
На современном гражданском самолете разнообразные бортовые системы и подсистемы управления составляют сложный навигационно-пилотажный комплекс оборудования (НПК), который обеспечивает взлет самолета, полет по маршруту и посадку на заданный аэродром при сложных погодных условиях.
Сложная система, к которой относится НПК, может быть разделена на части различными способами, по разным признакам.
Обычно НПК делится на два комплекса: навигационный и пилотажный.
Навигационный комплекс (НК)—это комплекс оборудования, определяющий заданную опорную траекторию полета центра масс летательного аппарата, выдающий информации об отклонении центра масс от опорной траектории и информацию о текущем положении центра масс летательного аппарата в пространстве. В состав НК может входить цифровая или аналоговая вычислительная машина, которая вырабатывает управляющие сигналы в пилотажном комплексе.
Пилотажный комплекс (ПК)—это комплекс оборудования, осуществляющий стабилизацию центра масс летательного аппарата на заданной опорной траектории и управление его поворотом вокруг центра масс с обеспечением требуемых пилотажных характеристик и безопасности полета при автоматическом, полуавтоматическом и ручном пилотировании.
Границей между НК и ПК служат те переключающие устройства, которые отключают сигналы отклонения центра масс ЛА от опорной траектории, поступающие из НК в ПК на режимах полуавтоматического и автоматического пилотирования.
Навигационно-пилотажный комплекс может быть разделен на следующие части: датчики первичной информации, вычислитель, исполнительные устройства, средства индикации пилотажной и навигационной обстановки. В средства индикации входят все устройства, преобразующие для экипажа электрические сигналы в визуальную и звуковую форму.
В ПК входят три основных функциональных системы: система штурвального управления (СШУ), система траекторного управления (СТУ) и система отображения информации (СОИ).
Система штурвального управления, состоящая из двух частей (системы перемещения органов управления и системы улучшения пилотажных характеристик), предназначена для обеспечения требуемых пилотажных характеристик (демпфирования, устойчивости и управляемости) и предотвращения возможности выхода самолета на опасные режимы при автоматическом, полуавтоматическом и ручном пилотировании. Аппаратурный состав и структура СШУ определяются аэродинамическими и геометрическими особенностями конкретного летательного аппарата. Система штурвального управления должна работать при каждом из трех возможных способов пилотирования. Она органически связана с самолетом. Если пилотажные характеристики самого самолета удовлетворяют требованиям, то необходимости в специальной подсистеме улучшения пилотажных характеристик не возникает. Но, с другой стороны, для самолетов, пилотирование которых невозможно без автоматических устройств, указанная подсистема должна быть спроектирована и установлена на самолете в первую очередь, чтобы обеспечить нормальные испытательные полеты.
Система траекторного управления состоит из двух частей (системы формирования командных сигналов и системы отработки сигналов рассогласования) и предназначена для стабилизации центра масс летательного аппарата на заданной траектории и управления поворотом летательного аппарата вокруг центра масс. Аппаратурный состав и структура СТУ определяются совокупностью пилотажных задач. К числу таких задач относятся управление высотой и скоростью полета, а также угловым положением самолета. Динамические контуры СШУ являются внутренними по отношению к динамическим контурам СТУ. К последним относятся контуры стабилизации углового положения самолета и контуры стабилизации центра масс самолета на заданной траектории.
В систему отображения информации включаются все средства индикации, устанавливаемые на рабочем месте летчика и обеспечивающие его информацией, необходимой для пилотирования самолета и выполнения полетного задания. Это — индикаторы пилотажной обстановки и директорные приборы.
Совокупность этих способов управления и контроля за полётом образует систему «самолёт-автопилот»
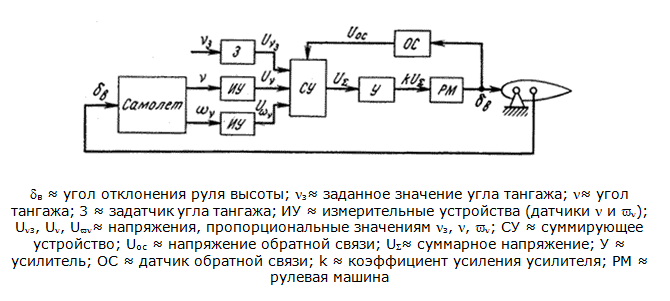
Рис. 7. Самолет-автопилот
Система «самолет-автопилот» представляет единую замкнутую систему автоматического регулирования и управления. Автопилот состоит обычно из трех автоматических систем регулирования с внутренними перекрестными связями. Все три системы обычно выполняются по одинаковым схемам. В приложении []. приведена схема канала управления рулями высоты.
В состав каждого канала входят измерительные устройства ИУ, суммирующие устройства СУ, усилительные (У) и исполнительные устройства (РМ). Измерительные устройства ИУ автопилотов типа АП (например, датчики углов крена, тангажа, курса, высоты и т. п.) измеряют значения отклонений угла и угловой скорости (например, угла тангажа , угловой скорости тангажа ) и преобразуют эти отклонения в величины напряжений U и U. После алгебраического суммирования в суммирующем устройстве СУ сумма напряжений U усиливается усилителем У и подается на рулевую машину РМ автопилота. Последняя отклоняет руль высоты, в результате чего появившееся отклонение угла тангажа ликвидируется.
На суммирующее устройство с выхода рулевой машины подается сигнал Uос обратной связи. Отрицательная обратная связь обеспечивает устойчивость и быстрое затухание колебаний системы «самолет-автопилот». Для задания определенного значения угла тангажа з в схеме автопилота предусматривается специальный задатчик этой величины. Аналогичные функциональные схемы имеют каналы управления креном и курсом самолета. Для устранения автоколебаний в системе «Самолет-автопилот» в автопилотах применяется жесткая обратная связь. Жесткая обратная связь применяется для получения в установившемся состоянии пропорциональности между отклонением руля и отклонением ЛА. При этом закон регулирования автопилота имеет вид:
| по курсу | 
|
| по крену | 
|
| по тангажу | 
|
где н, э, в ≈ углы отклонения руля поворота, элеронов, руля высоты (стабилизатора);
kн, kэ, kв ≈ передаточные числа автопилота по курсу, крену, тангажу соответственно; , , ≈ угол отклонения (от заданного) самолета по курсу, крену, тангажу.
При учете суммарного сигнала по времени, например по курсу, автопилот стабилизирует ЛА на траектории, т. е. возвращает его на прежнюю траекторию полета. Уравнение автопилота для одного канала (курса) в этом случае записывается
Такое регулирование называется астатическим.
Режим работы автопилотов. Автопилоты обычно имеют три режима работы: согласования (подготовки), стабилизации и управления.
В качестве чувствительных элементов, реагирующих на угловые отклонения ЛА относительно центра тяжести, применяются:
- по курсу ≈ гирополукомпасы, дистанционные магнитные компас,ы, курсовые системы;
- по крену и тангажу ≈ центральные гировертикали, гиродатчики дистанционных авиагоризонтов;
- по курсу, крену и тангажу ≈ курсовертикали;
- по угловой скорости ≈ демпфирующие гироскопы;
- по угловому ускорению ≈ специальные устройства, вырабатывающие сигналы, пропорциональные угловому ускорению ЛА, путем дифференцирования сигналов датчиков угловой скорости.
Электрические сигналы отклонений ЛА по углу, угловой скорости и угловому ускорению, полученные с датчиков, усиливаются электронными или электромашинными усилителями, подаются на рулевые машины, которые перемещают соответствующие рули самолета или изменяют режимы работы (тягу) авиадвигателей. Автопилоты имеют электрические связи с курсовыми системами, централями скорости и высоты, демпферами колебаний, автоматами дополнительных усилий, навигационными вычислительными устройствами.

Рис. 8. Блок управления автопилотом приборной панели Боинг-747

Рис. 9. Приборная панель автопилота АП
Если в начале эпохи конструирование автопилотов было задачей сугубо механической, то с развитием ЭВТ возникает проблема создания функциональных и надежных программ.
Программирование – это кодирование, написание инструкций (программ) на конкретном программном языке, у которого есть – план, метод, решение поставленной задачи. Цель программирования – создать некую команду, которую в дальнейшем можно будет использовать с ЭВМ.
В настоящее время активно используются интегрированные среды разработки, включающие в свой состав также редактор для ввода и редактирования текстов программ, отладчики для поиска и устранения ошибок, трансляторы с различных языков программирования, компоновщики для сборки программы из нескольких модулей и другие служебные модули.
Текстовые языки программирования
Есть множество текстовых языков программирования. В данной работе будут рассмотрены C, C++ и C#, поскольку итоговый код ПО, которое создается в Esterel Scade, компилируется в C.
С — это стандартизированный процедурный язык программирования. ANSI C был создан для использования в операционной системе UNIX. С тех пор он был перенесён на многие другие операционные системы и стал одним из самых используемых языков программирования. ANSI C ценят за его эффективность. Он является самым популярным языком для создания системного программного обеспечения. Его также часто используют для создания прикладных программ. Несмотря на то, что Си не разрабатывался для новичков, он активно используется для обучения программированию. В дальнейшем синтаксис языка ANSI C стал основой для многих других языков, таких как С++ и С#
C++ компилируемый статически типизированный язык программирования общего назначения. Стандартная библиотека включает, в том числе, общеупотребительные контейнеры и алгоритмы. C++ сочетает свойства как высокоуровневых, так и низкоуровневых языков. В сравнении с его предшественником — языком C, — наибольшее внимание уделено поддержке объектно-ориентированного и обобщённого программирования.
C# (си шарп) — относится к семье языков с C-подобным синтаксисом, из них его синтаксис наиболее близок к C++. Язык имеет статическую типизацию, поддерживает полиморфизм, перегрузку операторов,делегаты, атрибуты, события, свойства, обобщённые типы и методы, итераторы, анонимные функции с поддержкой замыканий, исключения, комментарии в формате XML.
Переняв многое от своих предшественников - языков С, C++ — С#, опираясь на практику их использования, исключает некоторые модели, зарекомендовавшие себя как проблематичные при разработке программных систем, например, C# в отличие от C++ не поддерживает множественное наследование классов (между тем допускается множественное наследование интерфейсов).
Помимо классических языков программирования, которые используют в основном английский синтаксис, так же существуют русскоязычные.
Аналитик — язык программирования, разработан в 1968 г. в Институте кибернетики АН УССР. Является развитием языка АЛМИР-65, сохранив с ним совместимость. Отличительной чертой языка являются абстрактные типы данных, вычисления в произвольных алгебрах, аналитические преобразования.
РАПИРА — Расширенный Адаптированный Поплан-Интерпретатор, Редактор, Архив — процедурный язык программирования. Разработан в начале 80-х годов в СССР в качестве средства перехода от более простых языков к языкам высокого уровня. Синтаксис построен на основе русской лексики. Язык использовался в школах для изучения информатики. По своим возможностям язык не уступал другим известным на то время учебным языкам.
Плюсами текстовых языков программирования является гибкость, универсальность. Общая основа для большинства текстовых языков, ибо большинство нынешних языков обладают общим синтаксисом. Возможность использовать сторонние программы.
Минусами текстовых языков программирования, является трудность обучения и трудность восприятия. С развитием информационных технология, появилось желание упростить язык программирования и сделать его наглядным. Из этого появились графические языки программирования.
Графический язык программирования — язык, предназначенный для написания программы для компьютера или вычислительного устройства, в котором вместо текстового описания алгоритма работы используется графическое. К графическим языкам программирования, с некоторой натяжкой, можно отнести генераторы кода по блок-схемам или Дракон-схемам.
VisSim — это визуальный язык программирования, предназначенный для моделирования динамических систем, а также проектирования, базирующегося на моделях, для встроенных микропроцессоров. VisSim сочетает в себе характерный для Windows интуитивный интерфейс для создания блочных диаграмм и мощное моделирующее ядро.
ДРАКОН (Дружелюбный Русский Алгоритмический язык, Который Обеспечивает Наглядность) — визуальный алгоритмический язык, созданный в рамках космической программы Буран. Разработка данного языка была начата в 1986 г. под руководством Владимира Паронджанова. Одной из задач, ставившихся перед разработчиками, было создание единого универсального языка, который должен был заменить специализированные языки ПРОЛ2 (для разработки бортовых комплексных программ Бурана), ДИПОЛЬ (для создания наземных программ Бурана) и ЛАКС (для моделирования). Правила языка ДРАКОН по созданию диаграмм оптимизированы для восприятия алгоритмов человеком. Таким образом, язык является одним из инструментов усиления интеллекта.
И текстовые и визуальные языки имеют свои плюсы и минусы, однако существует среда программирования, в которой есть возможность совместить эти типы языков.
Комплект программ SCADE – это основанная на модели цепочка инструментов для разработки прикладного программного обеспечения систем управления, интеграционную роль в которой играет собственный язык Scade и его формальная нотация.. Структура Scade: это компоненты для создания проектов, моделирования и верификации проектов, генерации кода на Си и ADA и средства поддержки функциональной совместимости с инструментами разработки других производителей.
Унифицированная методология разработки моделей в системе SCADE позволяет объединять алгоритмические описания, сделанные с помощью потоков данных, с описаниями, сделанными с помощью конечных автоматов, на любом уровне иерархии проекта. SCADE обеспечивает проектировщика технологией однократного без итерационного ввода информации, которая позволяет выполнить реализацию требований без избыточности или неоднозначности и построить более точные программные модели. В библиотеке SCADE содержится более трехсот дискретных операторов.
Эффективное системное проектирование. Шлюз к системам управления требованиями SCADE Requirements Management (RM) Gateway позволяет создавать связи прослеживаемости (traceability links) между системными требованиями, моделями, созданными в SCADE Suite и SCADE Display, структурным дизайном, тестовым планом и проектной документацией.
Система производства сертифицированного ПО SCADE предоставляет возможность ввода и обработки проекта системного уровня – спецификации требований, описания архитектуры на языке SysML/UML. Верификация и валидация на стадии проектирования. Симулятор SCADE (Simulator) исполняет встраиваемый код.
Данные языки программирования напрямую используются для создания автопилотов. С их помощью, программируются микроконтроллеры, которые обрабатывают поступающую на них информацию и с их помощью происходит контроль летательного аппарата. Размеры микроконтроллеров таковы, что маленький микрочип может управлять целым самолетом.
Микроконтроллер - микросхема предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает на одном кристалле функции процессора и периферийных устройств, содержит ОЗУ и (или) ПЗУ. По сути, это однокристальный компьютер, способный выполнять простые задачи.
Оперативная память (ОЗУ) - память с произвольным доступом. Энергозависимая часть системы компьютерной памяти, в которой временно хранятся данные и команды, необходимые процессору для выполнения им операции. Обязательным условием является адресуемость (каждое машинное слово имеет индивидуальный адрес) памяти.
Постоянное запоминающее устройство (ПЗУ) — энергонезависимая память, используется для хранения массива неизменяемых данных.
В постоянную память часто записывают микропрограмму управления техническим устройством: телевизором, сотовым телефоном, различными контроллерами, или компьютером (BIOS). 
Рис. 10. Микроконтроллер, в который вшита функция автопилота