Тема 1.4 Электрооборудование и электрические схемы дистанционного управления машинами, механизмами и угледобывающими комплексами
Лекция 5 - Электрооборудование и принципиальные электрические схемы дистанционного управления угледобывающими машинами и комплексами
ОСНОВНЫЕ ПРИНЦИПЫИ СХЕМЫДИСТАНЦИОННОГО УПРАВЛЕНИЯ МАШИНАМИ И МЕХАНИЗМАМИ
В зависимости от условий работы, технических требований и требований правил безопасности, для обеспечения производительной работы машин применяют три способа управления ими: местное, дистанционное и автоматическое.
Местное управление осуществляется в случаях, когда исполнительная машина и аппаратура управления ею находится рядом, а условия эксплуатации не требуют частых включений и отключений электропривода. При местном (непосредственном) управлении обычно применяется ручная пусковая и защитная аппаратура, иногда — магнитные пускатели, управление которыми производится с помощью встроенных кнопок.
К достоинствам местного управления относятся: простота устройства и обслуживания, невысокая стоимость аппаратуры управления; к недостаткам: необходимость постоянного присутствия обслуживающего персонала, невозможность осуществления многих необходимых видов защиты, необходимость размещения аппаратуры управления рядом с исполнительным механизмом, повышенная опасность эксплуатации оборудования во взрывоопасных условиях.
Местное управление в подземных выработках применяют довольно редко.
Дистанционное управление — управление исполнительной машиной на расстоянии. Оно дает возможность: наиболее полно осуществлять необходимые защиты машины иобслуживающего персонала, располагать взрывоопасную аппаратуру управления и защиты в местах с наиболее благоприятными климатическими условиями, сосредоточить управление несколькими машинами в одном, наиболее удобном месте, повысить производительность труда и т. д. В связи с этим дистанционное управление нашло широкое применение в подземных условиях.
Под автоматическим управлением понимается такое управление, когда весь процесс выполнения работы электроприводом происходит без непосредственного участия человека.
Наиболее распространенные принципиальные схемы дистанционного управления горными машинами
В соответствии с требованиями ПБ схемы дистанционного управления горными машинами должны иметь:
1) минимальное количество проводов, по которым осуществляется управление;
2) следующие затраты: а) нулевую; б) минимальную; в) максимальную; г) температурную; д) от потери управления; е) от обрыва и ухудшения качества заземления передвижной машины; ж) от включения напряжения на участок электрической цепи с плохим качеством изоляции относительно земли;
3) напряжение в цепях управления не более 40 В;
4) искробезопасные цепи управления (для шахт, опасных по газу); должны обеспечивать:
1) последовательность включения и отключения механизмов в соответствии с технологией работы их;
2) контроль за исправной работой механизмов, работающих в одной технологической линии;
3) возможность включения и отключения механизмов с необходимого количества мест;
4) автоматическое отключение напряжения в силовых линиях до размыкания силовых контактов штепсельных соединений при попытке разъединить их;
5) размыкание и замыкание силовых контактов в местах с наименьшим содержанием метана в рудничной атмосфере;
6) отсутствие рабочего напряжения в кабеле при отключении двигателя машины.
К схемам дистанционного управления специальных машин, помимо вышеперечисленных, предъявляются дополнительные требования, вытекающие из специфики их работы.
Правильный выбор аппаратуры управления обеспечивает выполнение многих требований ПБ к схемам дистанционного управления.
Выбор пускателей серий ПВИ, ПМВИ, ПВ-1140 и агрегатов АП, АБК или магнитных станций СУВ обеспечивает наличие в схемах всех необходимых зашит (исключая температурную), нужного напряжения в цепях управления и искробезопасность их.
Остальные требования выполняются следующим образом:
1) температурная защита обеспечивается за счет размещения температурных реле в работающих электродвигателях и включения их размыкающих контактов в цепи управления пускателей;
2) определенная последовательность включения и отключения машин достигается за счет электрических блокировок между пускателями;
3) контроль за нормальной работой машин осуществляется путем включения в цепь управления пускателя контактов специальных реле, установленных на машине;
4) автоматическое отключение напряжения при размыкании штепсельных соединений достигается за счет конструкции контактных систем штепсельных муфт;
5) замыкание и размыкание силовых цепей в благоприятных условиях достигается за счет соответственного размещения аппаратуры;
6) остальные пункты требований выполняются за счет конструкций схем управления.
Все схемы дистанционного управления базируются на двух принципиальных схемах управления контакторами: двухпроводной и трехпроводной.
На рис. 20.1 приведены цепи управления пускателями в рудничном исполнении.
На рис. 20.1, а приведена принципиальная схема дистанционного управления, которая требует наличия между пускателем и машиной шести токоведущих проводов: три для управления (на чертеже провода /—4 2—5; 3—6) и три для передачи энергии от пускателя к электродвигателю машины (на чертеже не показаны). Такая схема называется трехпроводной.
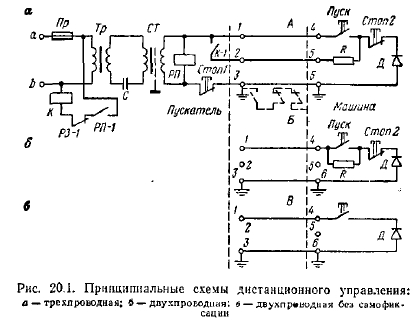
В схеме для управления используются искробезопасные цепи (все линии, отходящие от клемм 1, 2, 3). Контакты реле, обеспечивающие блокировку последовательности пуска машин, защиту от перегрева электродвигателя, защиту от работы машины при опасной концентрации метана в атмосфере и т. д., включаются в схему управления последовательно между контактами 3 и 6 (на рисунке показаны пунктиром). Контроль за нали чием заземлении осуществлен путем включения заземля- ющей жилы 3 — 6 как токоведущей в цепь управления. Контроль за величиной сопротивления заземляющей жилы осуществляется катушкой РП, которая при большом сопротивлении цепи с диодом не сможет ни притянуть якорь, ни удержать его в притянутом состоянии. Защита от потери управления выполняется путем размещения диода Д в конце цепи управления. Нулевая защита обеспечивается катушкой К и блок-контактом ее К-1. Минимальная защита обеспечивается применением резистора R, который ограничивает ток в катушке РП до величины, достаточной для удержания якоря в притянутом состоянии только при напряжении на зажимах катушки (0,6 4-0,7) УП0м и выше.
Данная схема отвечает всем требованиям ПБ, поэтому широко используется в подземных условиях.
При подсоединении схемы А к фазам а и b первичные и вторичные обмотки трансформатора Тр, стабилизатора СТ и катушка РП будут обтекаться переменным током; все контакты останутся в положениях, изображенных на рисунке.
При нажатии кнопки «Пуск» ток от вторичной обмотки СТ в первый полу пер иод пройдет по цепи: СГ — «Стоп 1»—Д — «Стоп 2»—«Пуск»—СТ, во второй полу период—по цепи: СТ— РП — СТ. Катушка РП обтечет- ся постоянным током, замкнется контакт РП-1, катушка контактора К обтечется током по цепи: а — Пр — РП-1, РЗ-1 — К— Ь, включит силовые контакты (на рисунке не показаны), замкнет блок-контакт К-1. Теперь уже в первый полупериод ток от вторичной обмотки СТ будет проходить по двум параллельным цепям: СТ—«Стоп 1»— Д — «Стоп 2» — «Пуск» — СТ и СТ — «Стоп 1»— Д — «Стоп 2» — R — К-1 — СТ, Отпущенная кнопка «Пуск» размыкает первую цепь, а катушка РП продолжает получать питание по второй цепи и пускатель остается включенным. При нажатии на одну из кнопок «Стоп» разрывается цепь питания постоянным током катушки РП, контактор выключается и схема приходит в первоначальное положение.
На рис. 20.1, б показана двухпроводная схема дистанционного управления, где для управляющих цепей требуется только два проводника.
Эта схема отличается от предыдущей тем, что нулевая защита в ней осуществляется за счет применения резистора R, который подбирается такой величины, что 8 1-34 225 при номинальном напряжении в цепи управления Un0M ток в цепи катушки РП недостаточен для ее срабатывания.
При замыкании контактов кнопки «Пуск» резистор R закорачивается (шунтируется), катушка РП обтекается достаточно большим током, срабатывает и замыкает свой контакт в цепи катушки К— контактор включается.
После размыкания контактов кнопки «Пуск» величина тока в катушке РП уменьшается (так как в цепь включился резистор R), но остается достаточной для удержания контакта РП-1 в замкнутом состоянии — контактор остается включенным.
Недостатком схемы является ненадежность нулевой защиты, так как при значительных колебаниях напряжения сети (свыше 1,5 Ull0M) возможно самовключение пускателя. Учитывая этот недостаток, двухпроводная схема дистанционного управления с самофиксацией в подземных условиях применяется реже трехпроводной.
На рис. 20.1 в приведена двухпроводная (без самофиксации) схема дистанционного управления, где включение контактора происходит только при нажатой кнопке «Пуск». При размыкании кнопки «Пуск» контактор выключается, так как размыкается цепь питания постоянным током катушки РП. Такая схема применяется для управления электросверлами, иногда для управления маневровыми лебедками.
Схемы управления конвейерными установками
Конвейерная доставка угля на предприятиях угольной промышленности получает все более широкое распространение. На эксплуатационных участках шахт зачастую последовательно работают два-три конвейера. При небольшой длине конвейерных линий и небольшом количестве конвейеров для управления ими экономически выгодно применять рудничные пускатели в сочетании с необходимыми реле.
Схемы управления конвейерными линиями, помимо соответствия общим требованиям ПБ к схемам дистанционного управления, должны обеспечивать: автоматический запуск конвейеров в последовательности против движения груза; запуск последующего конвейера только после достижения номинальных режимов работы предыдущим конвейером; автоматический контроль за исправной работой конвейерной линии; подачу звукового сигнала перед пуском линии.
Для осуществления этих требований используют следующее оборудование: пускатели ПВИ или ПМВИ; реле РСА, АУМ-1А или РС-67, которые обеспечивают контроль скорости движения подвижного органа конвейера (замыкающие контакты их замыкаются только тогда, когда скорость движения ленты или скребковой цепи достигает номинального значения); сигнальная установка, комплектуемая пусковым агрегатом АП-3,оМ и сиренами ВСС-3.
Управление несколькими конвейерами сосредоточивают на погрузочном пункте и осуществляют одним кнопочным постом БУВ, который подсоединяют по трехпроводной схеме к первому пускателю; в цепь управления последовательно с кнопкой «Стоп» включают замыкающий контакт УС сигнальной установки. Такое включение обеспечивает пуск первого пускателя только после подачи сигнала, т. е. после замыкания контакта УС-1 (рис. 20.3).
В цепь управления следующего пускателя 2 включается кнопка «Стоп» с фиксацией, дающая возможность при необходимости остановить конвейер № 2, контакт реле скорости РС1-1 и блокирующая цепочка пускателя № 1. Аналогично подключают цепи управления и последующих пускателей.

При нажатии кнопки «Пуск» (после подачи сигнала) включается двигатель первого конвейера. Блок-контакт К-5 первого пускателя замкнется и подготовит для включения цепь управления второго пускателя, но он включится только тогда, когда будет замкнута кнопка «Стоп» и реле скорости, установленное на первом конвейере, замкнет свой контакт РС1-1. Это произойдет при достижении первым конвейером номинальной скорости движения несущего органа.
Таким же образом включатся и последующие пускатели конвейеров.
Для остановки всех конвейеров нужно выключить пускатель первого конвейера нажатием кнопки «Стоп»; для остановки конвейера № 2 или № 3 служат аварийные кнопки «Стоп».
В случае повреждения подвижных элементов предыдущего конвейера (ленты, скребковой цепи) реле скорости PC размыкает контакты цепи управления последующего конвейера, что приводит к выключению пускателя и предупреждает подачу груза на неисправный конвейер.
Эта простая схема вполне работоспособна и довольно часто применяется на практике.
Схемы дистанционного управления добычными комбайнами на шахтах, разрабатывающих пологие и крутые пласты
Для механизации добычи угля на пологих и крутых пластах применяются различные типы комбайнов в комплексе с другими забойными машинами. Поэтому электрическая схема управления добычным комбайном объединяет управление комплексом машин. На пологих пластах —это добычной комбайн, главный конвейер, двигатель насоса оросительной установки, сигнальная установка. На крутых пластах — добычной комбайн, кабелеукладчик, лебедка, сигнальная и оросительная установки.
К схемам управления добычными машинами на пологих пластах, помимо общих требований ПБ, предъявляются дополнительные требования:
1) дистанционное управление магнитными пускателями комбайна и конвейера;
2) автоматическую подачу предупредительного сигнала продолжительностью 4—6 с перед включением комбайна и конвейера;
3) автоматическое включение пускателя насосной установки орошения при пуске комбайна и конвейера;
4) дистанционное отключение автоматического выключателя с пульта управления комбайном;
5) блокировку пускателей комбайна, конвейера, оросительной установки;
6) отключение комбайна и конвейера с помощью кнопки «Стоп» (с фиксацией положения), расположенной вблизи режущего органа комбайна;
7) отключение конвейера при повреждении или неисправности подвижной части его;
8) управление конвейером с кнопочного поста, установленного у приводной головки его.
Электрические схемы для управления добычными машинами па крутых пластах должны дополнительно к основным требованиям обеспечить:
1) телефонную связь машиниста с лебедчиком;
2) дистанционное управление пускателями электродвигателей комбайна, лебедки, насоса орошения, кабелеукладчика;
3) электрическую блокировку между пускателями комбайна, лебедки, кабелеукладчика и насоса орошения;
4) дистанционное аварийное отключение автоматического выключателя 7 с пульта управления комбайном;
5) невозможность включения пускателя комбайна при зафиксированной кнопке «Стоп — аварийная» (находится на пульте управления комбайном);
6) возможность самостоятельного включения пускателя электродвигателя лебедки для осуществления маневровых работ;
7) подачу сигнала перед включением лебедки.
На крутых пластах нашли применение комбайны «Темп», «Комсомолец» и др.
Они комплектуются следующей электроаппаратурой:
а) на вентиляционном штреке располагается распред- пункт, куда входят; автоматический фидерный выключатель АФВД-2БК или АВ, пускатели комбайна, кабелеукладчика, насоса орошения типов ПВИ или ПМВИ, пускатель лебедки ПМВИР, АП-3, 5М;
б) на штреке у насоса располагается электромагнитный вентиль ВЭГ-ЗД. который замыкает свои контакты при наличии давления в системе орошения; у лавы располагается сирена ВСС-3;
в) у лебедки находится пульт управления лебедкой, аварийная кнопка «Стоп» для снятия напряжения со всего участка;
г) непосредственно на комбайне расположены две кнопки — «Стоп-блокировка» и «Блокировка-маиевро- вая»;
д) управление комплексом ведется с переносного пульта ПУС1-6, на котором имеются необходимые кнопки управления комбайном и лебедкой;
е) для опробования работы насоса орошения и кабелеукладчика у каждого из них имеются индивидуальные кнопочные посты управления пускателем;
ж) для связи на комбайне и лебедке имеется телефон ТА-КП.
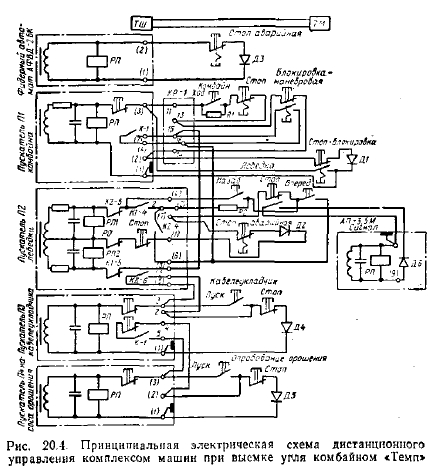
При чтении схемы рис. 20.4 необходимо знать, что:
а) включение лебедки «Вперед» возможно либо при включении в работу комбайна (блокировка осуществляется блок-контактом Спускателя П1), либо после нажатия кнопки «Блокировка-маневровая» (тогда К-1 шунтируется кнопкой);
б) включение пускателя кабелеукладчика происходит автоматически при включении пускателя П2 лебедки в направлении «Вперед» (цепь управления пускателя ПЗ замыкается контактом К2-6);
в) автоматически включается и пускатель П4 насоса орошения при включении пускателя ПЗ кабелеукладчика (цепь управления пускателя П4 замыкается контактом К-1 пускателя ПЗ);
г) между сигналом и схемой управления отсутствует блокирующая связь, поэтому обусловлено, что перед пуском комбайна машинист нажимает на 4—6 с кнопку «Стоп» лебедки, чем включает АП-3,5М и сигнал.
Цепи управления пускателей работают следующим образом;
а) вручную включаются разъединители всех пускателей и автоматического выключателя — напряжение подано;
б) нажав ета кнопку «Стоп» лебедки, через диод Д6 шунтируют промежуточное реле пускового агрегата АП-3.5М на один пол упер иод, в результате пускатель агрегата включается и подает напряжение (127 В) на сирену ВСС-3 — звучит предупредительный сигнал;
в) нажав на кнопку «Ход» комбайна, через диод Д1 шунтируют промежуточное реле РП пускателя П1 на один полупериод — катушка РП обтекается током и замыкает свои контакты в цепи катушки контактора К — пускатель включается;
г) нажав на кнопку «Вперед», замыкают цепь промежуточного реле РП2 пускателя П2, При этом ток пройдет по цепи: зажим 3 пускателя П2 — зажим 15 коробки КР-1 — блок-контакт К-1 пускателя П1 — зажим 16 — кнопки «Вперед», «Стоп», «Стоп-аварий- ная» — диод Д2 — зажим / пускателя П2; катушка реле РП2 обтечется постоянным током, сработает и включит контактор К2 пускателя П2 — лебедка начнет работать. После отпускания кнопки «Вперед» цепь останется замкнутой, так как кнопка шунтируется блок-контактом К2-4 и сопротивлением R2;
д) цепь управления пускателя ПЗ (кабелеукладчик) включается замыкающим контактом К2-6 пускателя П2 (при включении лебедки «Вперед») — кабелеукладчик. начинает работать;
е) цепь управления П4 (насос орошения) включается замыкающим контактом К-1 пускателя ПЗ — насос начинает работать.
На пологих пластах применяются различные типы добычных комбайнов. Все шире применяется работа комбайнов с механизированными крепями. Для управления ими применяются магнитные станции СУ В-350, электрические схемы которых рассматривались в предыдущей главе.
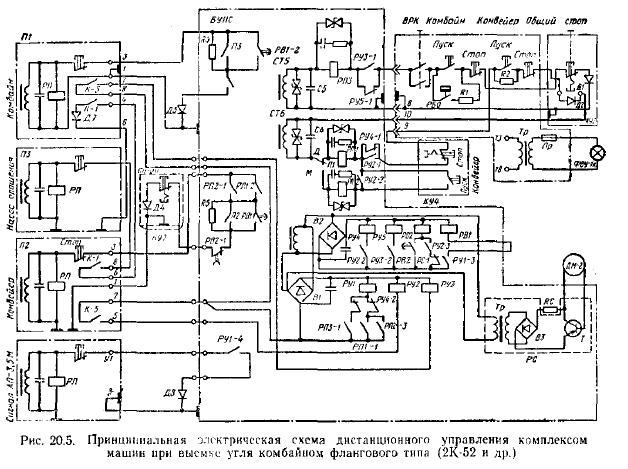
Наряду с комплексами широко практикуется работа фланговых добычных комбайнов 2К-52, 1К-Ю1 и других с индивидуальной крепью. В схемах управления такими комбайнами используются отдельные пускатели и дополнительные блоки аппаратуры управления, предупредительной сигнализации и громкоговорящей связи БУПС и СГС. Для примера рассмотрим принципиальную схему дистанционного управления комбайном 2К-52 (рис. 20.5).
Схема объединяет управление комбайном, конвейером, оросительной установкой и сигнальным устройством, состоящим из пускового агрегата АП-3,5М и сирен ВСС-3. Для контроля за исправной работой конвейера используется реле PC с датчиком ДМ-2.
Электрооборудование в лаве расположено в ниже перечисленных местах. Непосредственно на комбайне находится штепсельная вводная муфта, электродвигатель, пульт управления с кнопками «Пуск» и «Стоп» для электродвигателя комбайна и кнопками «Пуск» и «Стоп» для электродвигателя конвейера, кнопка «Стоп» для общего отключения, фара типа ФВУ-1к, трансформатор освещения ТБС-2-0,05, аварийный выключатель ВРК-20, реле давления РБО типа РК.Д-1.
У приводной головки конвейера смонтированы: электродвигатель конвейера, кнопочный пост (КУ-4 на рис. 20.5), датчик ДМ-2, вдоль става — сирены ВСС-3.
На распределительном пункте находятся пускатели П1, П2, ПЗ, АП-3,5М, аппарат БУПС и станция СГС (на рисунке не показана). На насосе орошения находится электродвигатель, электромагнитный вентиль типа ВЭГ- ЗД, который питается от осветительной обмотки трансформатора пускателя двигателя насоса.
Сирены ВСС-3 питаются напряжением 127 В от одного из пускателей агрегата АП-3.5М.
Особенностью электрической схемы является следующее:
а) аппарат БУПС кроме рукоятки разъединителя имеет рукоятку переключения способа управления конвейером П1, которая имеет два положения: Д — управление конвейером с пульта комбайна и М — управление конвейером с кнопочного поста КУ-4 (кнопка «Стоп» этого поста в обоих случаях остается включенной в цепь управления);
б) в схеме предусмотрена: подача сигнала длительностью 4—б с перед пуском конвейера, комбайна как при раздельном, так и при совместном пуске;
в) возможность пуска комбайна без включения конвейера и орошения, при этом комбайн будет работать до тех пор, пока нажата кнопка «Пуск»;
г) возможность остановки одного комбайна (нажатием кнопки «Стоп» комбайна или поворотом рукоятки ВРК-20), остановки всех машин лавы (нажатием кнопки «Общий стоп» (КУ2) или «Стоп» конвейера на пульте комбайна, на головке конвейера (КУ7, КУ4);
д) аппарат БУПС обеспечивает определенную очередность пуска машин лавы (сигнал, запуск конвейера, комбайна, насоса орошения);
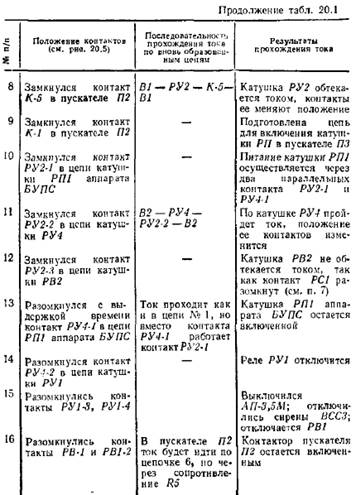
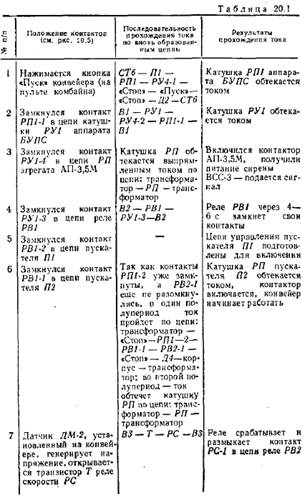
Последовательность срабатывания аппаратов, с учетом вышеуказанных блокировок, в схеме следующая (табл. 20.1):
1) при включении разъединителей пускателей аппаратура подготавливается к работе;
 2) определяется характер управления путем установки переключателя П1 (на рис. 20.5 П1 установлена в положении Д — дистанционное управление конвейером с пульта комбайна).
2) определяется характер управления путем установки переключателя П1 (на рис. 20.5 П1 установлена в положении Д — дистанционное управление конвейером с пульта комбайна).