Используя пьезоэлектрические или магнитострикционные преобразователи мы можем создать устройство, измеряющее расстояние до объектов — ультразвуковой дальномер, который работает следующим образом.
В момент измерения мы создаем электрическое колебание при помощи генератора, которое преобразуясь (например, при помощи пьезокристалла) в ультразвуковую волну, излучается в окружающее пространcтво. Эта волна отражается от препятствия и возвращается как эхо в приемник (также можно использовать пьезокристалл). Измеряя время между посылкой и приемом нашего отраженного сигнала  и, зная скорость звуковой волны
и, зная скорость звуковой волны  , распространяемой в данной среде (для воздуха это величина около 340 м/с), мы можем вычислить расстояние
, распространяемой в данной среде (для воздуха это величина около 340 м/с), мы можем вычислить расстояние  до препятствия.
до препятствия.

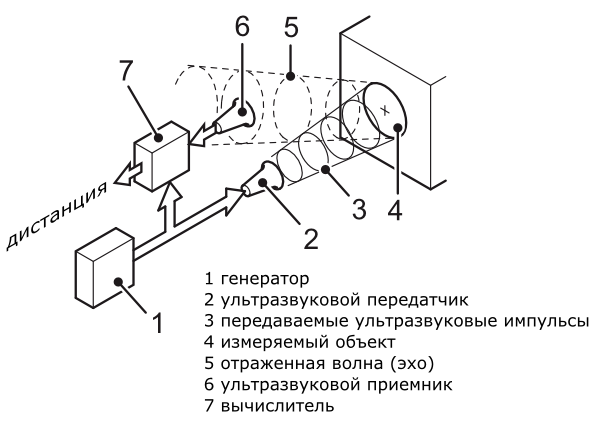
Принцип действия ультразвукового дальномера
Недостатки
Повышением частоты (снижением длины) излучаемой волны можно увеличивать чувствительность прибора к более мелким объектам.
Частичные отражения, или как их называют паразитный эхо-сигнал, могут исказить результаты измерений (причиной могут стать криволинейные или наклонные по-отношению к направлению излучения сигнала поверхности).
Паразитный эхо-сигнал
Измерения объектов из звукопоглощающих, изоляционных материалов или имеющих тканевую (шерстяную) поверхность могут привести к неправильным измерениям вследствии поглощения (ослабления) сигнала. Домашний кошара может стать этаким «стелсом» для ультразвукового дальномера.
Чем меньше объект, тем меньшую отражающую поверхность он имеет. Это приводит к более слабому отраженному сигналу.

Отражение от маленького объекта приводит к слабому сигналу
При высокой влажности (дождь, снег) сигнал также может частично отражаться от капель (снежинок), что приводит к паразитному эхо-сигналу.
Сильный ветер может повлиять на распространение волн (буквально «сдуть»), что также приводит к ошибке измерений.
Датчик следования
Этот модуль имеет потенциометр, который можно использовать для регулировки диапазона обнаружения. Уровень контакта Mode можно контролировать для выбора режима работы. Когда он находится на высоком уровне, модуль может запускаться повторно для индукции в реальном времени. Когда он находится на низком уровне, модуль находится в режиме неповторяемого запуска. Если кто-то движется в диапазоне индукции, модуль запускается и поддерживается в течение определенного периода времени. В этот период состояние не будет вмешиваться, если кто-то движется в диапазоне вычетов.


Описание работы робота
Используя датчик следовщего, робот патрулирует указанный маршрут. Когда ультразвуковой датчик обнаруживает препятствие, робот останавливается.
Выбор микроконтроллера
Микроконтроллер является важной частью мобильного робота. Используя микроконтроллер в качестве ключевого вычислительного и логического устройства управляющей системы мобильного робота, возникает потребность в высокой частоте работы, и больших объемах оперативной памяти этого микроконтроллера.
Существует множество микроконтроллеров и уже готовых печатных плат позволяющих упрощает процесс работы с микроконтроллерами и осуществлять физические вычисления, такие печатные платы предлагают схожую функциональность. Все эти устройства объединяют разрозненную информацию о программировании и создают из неё удобную в использовании конструкцию. Выбранная для рассмотрения микроконтролльная печатная плата (марки Ардуино (англ. Arduino)), в свою очередь, тоже упрощает процесс работы с микроконтроллерами.
Микроконтроллеры "ATMEGA8" и "ATMEGA168" являются основой для печатных плат марки "Ардуино"
Выбранная для рассмотрения микроконтроллерная печатная плата имеет ряд преимуществ перед другими устройствами для потребителя:
Простая и понятная среда программирования - среда программирования микроконтроллерных печатных плат, марки "Ардуино", подходит как для начинающих разработчиков, так и для опытных. Программное обеспечение (ПО) с возможностью расширения и открытым исходным текстом, это значит, что среда программирования микроконтроллерных печатных плат марки "Ардуино" выпускается как программа, которая может быть изменена опытными пользователями по необходимости.
Язык программирования может дополняться библиотеками C++. Также при необходимости разработчик имеет возможность перейти на язык "AVR C" на котором основан язык "C++". Соответственно, имеется возможность добавить код из среды "AVR-C" в программу программирования микроконтроллерных печатных плат.
Аппаратные средства имеют возможность расширения так как принципиальные схемы выложены в свободный доступ. Микроконтроллеры "ATMEGA8" и "ATMEGA168"являются основой для печатных плат марки "Ардуино". Схемы микроконтроллерных печатных плат, марки "Ардуино", выпускаются с лицензией, а значит, опытные инженеры имеют возможность создания собственных версий таких устройств, расширяя и дополняя их. Даже обычные пользователи могут разработать опытные образцы с целью экономии средств. Топологии данных печатных плат находятся в свободном доступе.
Вывод Судя по классификации (представленной в пункте 1.1) и обозначенной во введении задачи, материалом корпуса может быть любой материал используемый для конструкций твёрдотельных роботов. Для экономии денег и создания малогобаритного лёгкого робота хорошо подойдёт пластик. В качестве основного двигателя мобильного робота хорошо подойдёт простой в управлении, достаточно мощный и имеющий большой КПД - коллекторный электродвигатель постоянного тока. Для рулевого управления подойдёт точный и с хорошим моментом силы сервопривод. В качестве управляющей системы была выбрана Микроконтроллерная печатная плата "Arduino Uno" которая обладает необходимым количеством вход/выходов и необходимой оперативной памятью и частотой работы.