· При ступенчатом воздействии по каналу регулирования;
· При ступенчатом воздействии по каналу возмущения;
Системы автоматического регулирования (САР), работающие с замкнутой цепью воздействия в общем виде могут рассматриваться, состоящими из двух взаимно воздействующих частей - объекта регулирования и автоматического регулятора.
Допустим, что при отсутствии изменения возмущений и изменения управляющих воздействий или спустя некоторое время после прекращения их действия, на время выведшего систему из равновесия, система автоматического регулирования находится в состоянии равновесия, т.е. регулируемый параметр объекта регулирования, имеет в пределах допустимой точности не меняющееся со временем заданное значение. При появлении какого-либо возмущения или изменении управляющего воздействия система регулирования приходит в движение. При этом так называемая устойчивая система при установившихся значениях управляющих и возмущающих воздействий, спустя некоторое время, вновь приходит к установившемуся состоянию равновесия, а неустойчивая система, придя в движение, не приходит к установившемуся состоянию равновесия, а отклонение ее от состояния равновесия будет либо все время увеличиваться, либо непрерывно изменяться в форме постоянных незатухающих колебаний.
Условие устойчивости системы состоит в том, что абсолютная величина отклонения регулируемого параметра от заданного значения по истечении достаточно большого времени должна стать меньше наперед заданного значения.
Процесс перехода системы от одного состояния равновесия в другое состояние равновесия называется переходным процессом.
При этом качество переходного процесса в устойчивой системе при прочих равных условиях будет тем выше, чем быстрее протекает переходный процесс и чем меньше за время его протекания изменяющиеся значения регулируемого параметра отклоняются от тех их постоянных значений, которые соответствуют новому установившемуся состоянию равновесия.
При рассмотрении характера переходных процессов обычно пользуются безразмерными значениями анализируемых величин. Для этого текущие абсолютные отклонения величин относят к каким-либо постоянным их значениям, характерным для данной системы. Обычно это бывают либо номинальные, либо максимальные значения.


 (p) зависит от выбранного регулятора
(p) зависит от выбранного регулятора

 (p) -
(p) - 
 (p) -
(p) -  возмущения
возмущения
(В данном случае (p) = 0)
Передаточная функция системы:

Отсюда переходная функция системы:
h(t)=  {
{  }= {
}= {  }
}
где  – передаточная функция регулятора;
– передаточная функция регулятора;
Для П- регулятора  =
=  =
= 
Для ПИ- регулятора  = +
= +  = +
= + 


Передаточная функция системы в этом случае:

Здесь  – передаточная функция объекта по каналу возмущения
– передаточная функция объекта по каналу возмущения
 =
=  =
= 
Переходная функция в этом случае:
h(t)= { }={  }
}
Исходными данными для программы являются:
· расчетный коэффициент передачи;
· a1, a2, a3 - коэффициенты передаточной функции;
· K2 - коэффициент передачи передаточной функции объекта по каналу возмущения;
· a4=T;
· S0, S1, S2 - настройки соответствующих регуляторов;
· V1 - задающее воздействие;
· f3 - возмущающее воздействие;
· h - шаг интегрирования;
· w1 –начальное значение времени;
· w2 - конечное значение времени;
Исходными данными для этой программы с ПИ- регулятором являются:
Время:
- начальный момент– 0,3
- конечный момент – 33,3
- шаг –1
Настройки регулятора:  =0,121572;
=0,121572;  =0,13925
=0,13925
Параметры объекта: К = 0,7 
Канал возмущающего воздействия: k = 0,7; Т = 4,9.
Изменение на 23% хода регулирующего органа
Результаты работы программы заносим в таблицу 6 и строим переходные процессы по каналу задающего и возмущающего воздействий.
Таблица 6
| Канал задающего воздействия | Канал возмущающего воздействия | ||||||
| X | Y | X | Y | X | Y | X | Y |
| 2,565598 | 2,565598 | ||||||
| 9,26E-02 | 9,26E-02 | 4,648525 | 4,648525 | ||||
| 0,3655268 | 0,3655268 | 6,261911 | 6,261911 | ||||
| 0,8611157 | 0,8611157 | 7,381282 | 7,381282 | ||||
| 1,570026 | 1,570026 | 7,978683 | 7,978683 | ||||
| 2,46 | 2,46 | 8,049953 | 8,049953 | ||||
| 3,376218 | 3,376218 | 8,049953 | 8,049953 | ||||
| 4,28916 | 4,28916 | 6,800674 | 6,800674 | ||||
| 5,084269 | 5,084269 | 5,675376 | 5,675376 | ||||
| 5,691518 | 5,691518 | 4,392464 | 4,392464 | ||||
| 6,071883 | 6,071883 | 3,092613 | 3,092613 | ||||
| 6,220282 | 6,220282 | 1,901438 | 1,901438 | ||||
| 6,162552 | 6,162552 | 0,9148915 | 0,9148915 | ||||
| 5,947848 | 5,947848 | 0,1903817 | 0,1903817 | ||||
| 5,638397 | 5,638397 | -0,2555626 | -0,2555626 | ||||
| 5,29865 | 5,29865 | -0,4434903 | -0,4434903 | ||||
| 4,985652 | 4,985652 | -0,4224567 | -0,4224567 | ||||
| 4,741965 | 4,741965 | -0,2586264 | -0,2586264 | ||||
| 4,591857 | 4,591857 | -2,32E-02 | -2,32E-02 | ||||
| 4,54086 | 4,54086 | 0,2186141 | 0,2186141 | ||||
| 4,578209 | 4,578209 | 0,4155607 | 0,4155607 | ||||
| 4,681357 | 4,681357 | 0,5353776 | 0,5353776 | ||||
| 4,821517 | 4,821517 | 0,5658042 | 0,5658042 | ||||
| 4,969216 | 4,969216 | 0,5125533 | 0,5125533 | ||||
| 5,09901 | 5,09901 | 0,3949095 | 0,3949095 | ||||
| 5,192757 | 5,192757 | 0,2400406 | 0,2400406 | ||||
| 5,241211 | 5,241211 | 7,71E-02 | 7,71E-02 | ||||
| 5,243937 | 5,243937 | -6,78E-02 | -6,78E-02 | ||||
| 5,207876 | 5,207876 | -0,1755454 | -0,1755454 | ||||
| 5,144992 | 5,144992 | -0,2357419 | -0,2357419 |
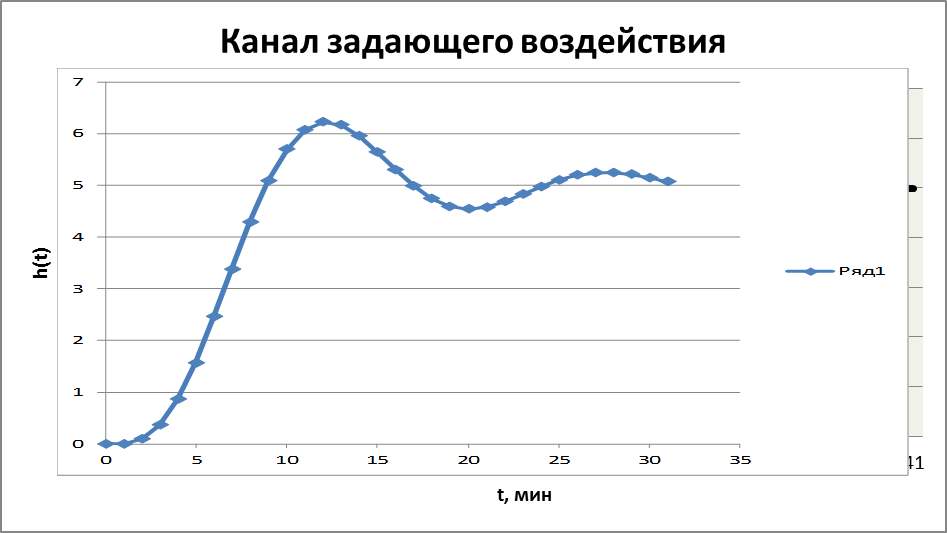
График 5.График переходного процесса в системе c ПИ – регулятором по задающему воздействию.

График 6.График переходного процесса в системе c ПИ – регулятором по возмущающему воздействию.
Исходными данными для программы с ПИД- регулятором являются:
Время:
- начальный момент– 0
- конечный момент – 31
- шаг – 1
Настройки регулятора: = 0,121572167209622; =0,1392545  = 0,5076
= 0,5076
Параметры объекта: К = 0,7
Канал возмущающего воздействия: k =0,37 Т = 4,5.
Изменение на 23% хода регулирующего органа.
Результаты работы программы заносим в таблицу 7 и строим переходные процессы по каналу задающего и возмущающего воздействий.
Таблица 7
| Канал задающего воздействия | Канал возмущающего воздействия | ||||||
| X | Y | X | Y | X | Y | X | Y |
| 4,578209 | 2,565598 | 0,5353776 | |||||
| 4,681357 | 4,648525 | 0,5658042 | |||||
| 9,26E-02 | 4,821517 | 6,261911 | 0,5125533 | ||||
| 0,365526 | 4,96921 | 7,381282 | 0,3949095 | ||||
| 0,861115 | 5,09901 | 7,978683 | 0,2400406 | ||||
| 1,570026 | 5,19275 | 8,049953 | 7,71E-02 | ||||
| 2,46 | 5,24121 | 8,049953 | -6,78E-02 | ||||
| 3,376218 | 5,24393 | 6,800674 | -0,175545 | ||||
| 4,28916 | 5,14499 | 5,675376 | -0,235749 | ||||
| 5,084269 | 5,06953 | 4,392464 | -0,247101 | ||||
| 5,691518 | 3,092613 | ||||||
| 6,071883 | 1,901438 | ||||||
| 6,220282 | 0,9148915 | ||||||
| 6,162552 | 0,1903817 | ||||||
| 5,947848 | -0,2555626 | ||||||
| 5,638397 | -0,4434903 | ||||||
| 5,29865 | -0,4224567 | ||||||
| 4,985652 | -0,2586264 | ||||||
| 4,741965 | -2,32E-02 | ||||||
| 4,591857 | 0,2186141 | ||||||
| 4,54086 | 0,4155607 |

График 7. График переходного процесса в системе c ПИД – регулятором по задающему воздействию.

График 8. График переходного процесса в системе c ПИД – регулятором по возмущающему воздействию.