В настоящее время накопители жестких дисков (рис. 4.12) выпускаются со следующими значениями формфакторов: 3,5; 2,5; 1,8 и 1 дюймов.
Все их многообразие представляет собой электромеханические устройства, состоящие из одних и тех же основных узлов, к которым относятся магнитные диски, головки считывания/записи, механизм привода головок, двигатель привода дисков и электронная схема управления на печатной плате.
Разъемы питания накопителей на жестких дисках для стационарных ПЭВМ стандартные, такие как у дисководов для гибких дисков, с двумя номиналами напряжения питания: 5 В поступает на электронные схемы, 12 В питает схемы управления шпиндельным двигателем и приводом головок. В малогабаритных накопителях для портативных компьютеров применяется одно питание — 5 В.
Диски, электродвигатель привода дисков, головки и механизм привода головок представляют собой конструктивный узел и размещаются в закрытом, но не герметизированном корпусе — для выравнивания давления в блоке предусмотрено закрытое фильтром отверстие, через которое воздух может проникать внутрь или выходить наружу.
В большинстве современных дисководов, предназначенных для портативных ПЭВМ, между этим корпусом и шасси накопителя устанавливается противоударная резиновая прокладка.

Рис. 4.12. 3,5-дюймовый дисковод жестких магнитных дисков: 7 — отсек с магнитными дисками; 2 — печатная плата

Рис. 4.13. Схемы дисководов с линейным и поворотным приводом блока
головок:
7 — набор магнитных дисков; 2 — вал шпинделя; 3 — направление движения блока
головок; 4 — привод блока головок; 5 — направление вращения дисков; 6 — головки
записи/считывания; 7 — двигатель шпинделя
 В накопителях обычно применяется несколько дисков (не менее двух), а данные записываются на обеих сторонах каждого из них. В большинстве устройств они несъемные.
В накопителях обычно применяется несколько дисков (не менее двух), а данные записываются на обеих сторонах каждого из них. В большинстве устройств они несъемные.
Существуют также накопители со сменными жесткими дисками. Съемные блоки с дисками имеют металлическую конструкцию, расстояние между диском и головкой у них больше, что снижает плотность записи и общую емкость носителя.
Для переноса данных применяют периферийные мобильные накопители емкостью 32...4000 Гбайт. Их ударопрочность обеспечивается размещением жесткого диска в металлическом корпусе с применением толстой резиновой амортизирующей прокладки.
В накопителях диски монтируются на общей оси шпинделя (рис. 4.13), который вращается от специального двигателя со стандартными скоростями: 4 500, 5 400, 7 200, 10 000, 12 000, 15 000 об./мин и более. Шпиндель представляет собой вращающийся вал с устройством для закрепления магнитных дисков.
Для вращения дисков используется бесшумный так называемый шпиндельный электродвигатель, который напрямую связан с валом крепления дискового набора. Частота вращения дисков должна быть постоянной, поэтому для ее стабилизации используется схема управления с автоподстройкой оборотов двигателя.
В современных накопителях вместо алюминиевых дисков широко используются стеклянные или стекло керамические диски, отличающиеся большей прочностью и жесткостью. Они менее воспри-
имчивы к перепадам температур, т.е. их размеры при нагреве и охлаждении изменяются очень незначительно, что повышает плотность и стабильность записи данных.
Поверхность каждого диска с двух сторон покрыта слоем из магнитного кобальтового сплава толщиной в сотые доли микрон, который наносится гальваническим покрытием (осаждением металла на диск с помощью тока из специального раствора) или напылением (осаждением газообразного металла в специальных вакуумных камерах).
Для обеспечения износоустойчивости поверх рабочего магнитного слоя наносится очень тонкое углеродное защитное полированное покрытие, позволяющее минимизировать зазор между головками и поверхностью дисков и увеличить тем самым амплитуду сигнала при считывании данных.
Наиболее сложной частью накопителя являются головки считывания/записи, которые по мере развития технологий постоянно совершенствовались.
По конструктивному исполнению головки подразделяются на ферритовые (монолитные и композитные), тонкопленочные и маг-ниторезистивные.
Монолитные и композитные (стеклоферритовые) головки изготавливали из миниатюрных ферритовых сердечников с проводными обмотками, в тонкопленочных головках использовался метод осаждения слоя проводящего материала на неметаллическом основании по технологии производства микросхем.
В современных дисководах применяются магниторезистивные головки.
Магниторезистивная головка представляет собой сборку из двух головок: тонкопленочная головка служит для записи, а магниторезистивная — для считывания. В тонкопленочной головке используется индуктивный принцип создания магнитного поля. В маг-ниторезистивной головке применяется эффект изменения сопротивления чувствительного элемента под действием магнитного потока.
Магниторезистивная головка меняет свое сопротивление при прохождении над участками с разным значением остаточной намагниченности. Через головку протекает небольшой постоянный измерительный ток и при изменении сопротивления в зонах намагниченности диска на ней изменяется падение напряжения, по которому определяется считываемая информация.
В жестких дисках дорожки расположены очень близко друг к другу, поэтому головка считывает сигналы от основной и от соседних дорожек, что отрицательно влияет на помехоустойчивость и достоверность получаемой информации. Для нейтрализации ошибок при считывании данных и повышения плотности записи применяется вероятностный метод PRML (Partial Response Maximum Likelihood — метод максимального правдоподобия при перекрывающемся отклике от соседних дорожек). Полезный сигнал от нужной дорожки выделяется по критерию максимума функции правдоподобия, которая вычисляется в реальном масштабе времени процессором цифровой обработки сигналов, встроенным в схему дисковода.
В современных дисководах происходит замена так называемого метода продольной записи, когда.магнитные домены, хранящие биты данных, размещены горизонтально вдоль дорожек, на перпендикулярный способ, при котором домены ориентируются в вертикальном направлении относительно дорожки. Домены имеют некоторую физическую длину, поэтому, размещая их не горизонтально, а перпендикулярно дорожке, разработчики жестких дисков добились существенного (почти 10-кратного) увеличения плотности записи на квадратный дюйм. При этом сократилось и энергопотребление на единицу объема информации за счет уменьшения количества дисков в приводе.
При продольной записи головка фиксирует сигнал фактически только в переходном участке между ячейками с разным направлением намагниченности, тогда как при перпендикулярной записи он считывается со всей зоны, в которой хранится бит.
Важной конструктивной единицей дисковода является механизм привода головок, который устанавливает их в нужное положение, перемещая от центра к краям диска на заданный цилиндр. В жестких накопителях в основном используют приводы с подвижными электромагнитными катушками.
Подвижная катушка соединяется с блоком головок и размещается в поле постоянного магнита, образуя соленоид. Катушка и магнит, расположенный внутри нее, механически не связаны между собой; перемещение катушки осуществляется только при взаимодействии их магнитных полей. Под действием электрического тока в катушке образуется электромагнитное поле, которое смещает ее вместе с блоком головок относительно закрепленного постоянного
магнита.
В отличие от привода с шаговым двигателем в устройствах с подвижной катушкой нет фиксированных положений, привязанных к дорожкам диска, поэтому блок головок может плавно перемещаться в любые положения в соответствии с изменениями напряжения
управления. Для точного позиционирования головок к нужному цилиндру используется специальная система наведения с автоматической регулировкой взаимного расположения дорожек и головок. Поиск конкретной дорожки осуществляется по заранее записанной на диске информации о позиционировании головок, определяющей реальное положение цилиндра на диске.
Такая конструкция позволяет обеспечить более высокие быстродействие, точность и надежность, чем традиционный привод с шаговым двигателем.
Приводы головок с подвижной катушкой бывают двух типов: линейные и поворотные, которые отличаются только схемой механического соединения катушек и блоков головок.
В линейных приводах катушка непосредственно соединена с блоком головок и перемещает их по прямой вдоль линии радиуса диска, как в накопителях на гибких дисках.
В поворотных приводах блок головок крепится к подвижной катушке с помощью рычагов. При движении катушки относительно постоянного магнита рычаги передвигают головки к краям или центру дисков. Поворотный привод используется почти во всех накопителях с подвижной катушкой, так как обладает существенным преимуществом — автоматической парковкой (принудительной установкой головок на неработающую зону диска при отключении питания). При включенном питании головки позиционируются и удерживаются в рабочем положении за счет взаимодействия магнитных полей подвижной катушки и постоянного магнита. Для того чтобы при выключении питания головки бесконтрольно не скользили по поверхностям не остановившихся дисков, становясь причиной повреждений магнитного слоя, поворотный блок головок подсоединяется к возвратной пружине. При отключении питания в ПЭВМ блок головок под воздействием пружины автоматически перемещается в зону парковки, предотвращая возможные повреждения дисков. Когда питание включено, магнитное взаимодействие катушки и магнита преодолевает упругость пружины и обеспечивает штатное функционирование дисковода.
При раскручивании дисков на головки воздействует аэродинамическое давление, освобождающее их от зоны парковки, оставляя воздушный зазор с магнитным покрытием в сотые доли микрон при достижении полной скорости вращения.
Большинство современных встраиваемых дисководов IDE и SCSI имеют один интерфейсный разъем и подключаются с помощью плоского кабеля.
Практически во всех накопителях используется так называемая зонная запись ZBR (Zoned Bit Recording — зонная битовая запись) с переменным количеством секторов на дорожке. Дорожки, более удаленные от центра, а значит и более длинные, могут хранить больший объем данных, поэтому на них размещают большее число секторов, чем на дорожках, более близких к центру.
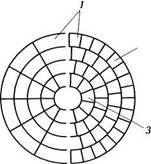
При этом способе записи цилиндры формируются в группы, которые называются зонами, причем по мере продвижения к внешнему краю диска дорожки в зонах разбиваются на все большее число секторов, длина которых соответствует размеру сектора внутренней зоны (рис. 4.14).
Во всех цилиндрах, относящихся к одной зоне, количество секторов на дорожках одинаковое. Возможное количество зон зависит от типа накопителя; в большинстве устройств их бывает более 10.
В накопителях, не использующих метод зонной записи (например, в дисководах гибких дисков или 1-; 1,8-дюймовых накопителях на жестких дисках), все цилиндры содержат одинаковое количество данных несмотря на то, что длина окружности внешних цилиндров может быть вдвое больше, чем внутренних. В результате при обычной записи теряется пространство внешних дорожек, так как оно используется очень неэффективно.
Для обеспечения надежности в жестких дисководах используют методы предсказания появления ошибок и неисправностей, определяемые системой мониторинга SMART (Self-Monitoring, Analysis and Reporting Technology — технология самотестирования, анализа и отчетности).
При активизации системы SMART жесткий диск начинает отслеживать определенные параметры, чувствительные к неисправностям их накопителя. На основе программного анализа их состояния можно предсказать сбои в работе накопителя.
 В большинстве дисководах происходит регистрация следующих параметров: зазор между головкой и диском; скорость передачи данных; количество переназначенных (неисправных)
В большинстве дисководах происходит регистрация следующих параметров: зазор между головкой и диском; скорость передачи данных; количество переназначенных (неисправных)
Л
Рис. 4.14. Обычная и зонная запись информации на жесткий диск:
1 — сектора; 2 — внешняя зона; 3 — внутренняя зона
секторов; время поиска дорожки и количество повторов процесс,i калибровки накопителя.
Каждый параметр имеет пороговое значение, по которому оп,е нивается состояние накопителя. В большинстве накопителей SMART с помощью операционной системы только оповещает mvu. зователя о нормальной работе или об ошибках, отправляя сообше ние о необходимости резервного копирования данных.
Кроме информационной емкости дисковые накопители хар<и< теризуются временем доступа к информации на диске и скорости*» ее считывания.
Время доступа к информации складывается из времени пером» • щения магнитной головки на нужную дорожку, времени установки головки и времени ожидания момента, когда при вращении нужн.ш область диска (сектор) окажется под головкой.
После доступа к информации происходит ее последовательное считывание, которое характеризуется скоростью.
Быстродействие оценивается по среднему времени доступе! и скорости передачи данных.
Среднее время доступа определяется суммой времени, необхо димого для позиционирования головок на нужный цилиндр и д< > ступа к данным, записанным в случайно выбранном секторе. Для современных накопителей это время составляет менее б мс.
Скорость передачи данных определяет объем данных, переден i ных (принятых) накопителем в единицу времени. Для ее повыше ыия многие накопители имеют встроенную кэш-память, размер которой достигает несколько десятков мегабайт. Кэш-память диска заполняется с применением опережающего считывания не только требуемым сектором, но и следующими за ним секторами, так как в большинстве случаев (в дефрагментированных накопи телях) взаимосвязанные данные файла хранятся в соседних сект» > pax.
Быстродействие накопителя зависит от многих факторов: чаек > ты вращения диска, скорости перемещения системы головок, коли ч:ества секторов на дорожке и места расположения данных. С р<> стом частоты вращения дисков возрастает скорость съема данных, так как выведение головок на заданный сектор происходит с меш. шим временем доступа.
Среднее время безотказной работы MTBF (Mean Time Between Failure) накопителей на жестких дисках определяется производите лем или расчетным путем, или на основе длительных статистичес к 11 \ испытаний большого количества дисководов с фиксацией их otk.i зов и по некоторым оценкам может достигать сотен тысяч часов.