Напряжение........................ 
Ток............................... 
Частота............................ 
Скорость Ротора.................... 
Сопротивление..................... 
Потокосцепление................... 
Индуктивность...................... 
В качестве базисного значения моментов двигателя и статического механизма выбираем значение электромагнитного момента двигателя в номинальном режиме:

где –  коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме.
коэффициент, учитывающий различие значений электромагнитного момента и момента на валу двигателя в номинальном режиме.
В качестве базисной мощности выбираем значение электромагнитной мощности двигателя в номинальном режиме, определяемое по следующей формуле:

Относительные значения параметров схемы замещения двигателя.

Механическая постоянная времени системы «двигатель-механизм» составляет:
Значения безразмерных коэффициентов в уравнениях, рассчитанные по выражениям, приведенным выше:

Модель АКЗ, построенная по уравнениям (1) – (6), представленная на рис. 1.
На вход модели в момент времени t=0 подаются напряжения  , тем самым реализуя прямой пуск.
, тем самым реализуя прямой пуск.
Осциллоскопы измеряют относительные значения электромагнитного момента и скорости. результаты моделирования представлены на рис. 2. Они показывают, что при прямом пуске вначале наблюдается значительные колебания момента. Такие же колебания наблюдаются в токе и скорости.
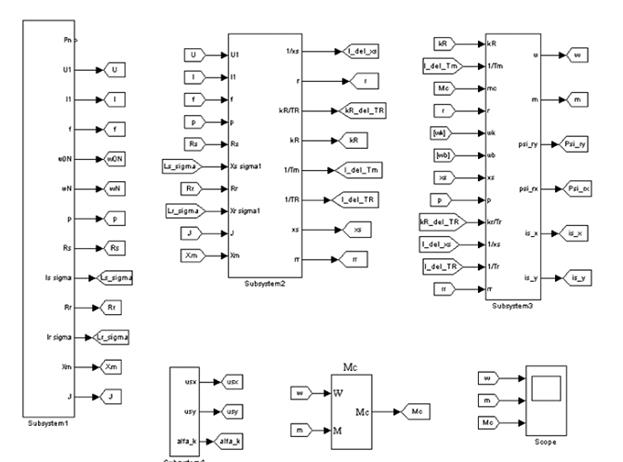
Рис. 37. Полная модель АКЗ во вращающейся системе координат с переменными 

Рис. 38.Номинальные данные и параметры схемы замещения

Рис. 39.Расчет параметров модели АД в системе относительных едениц
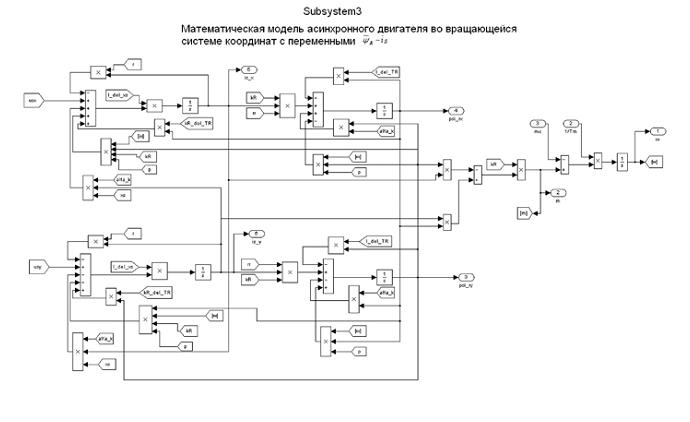
Рис. 40.Математическая модель АД во вращающейся системе координат
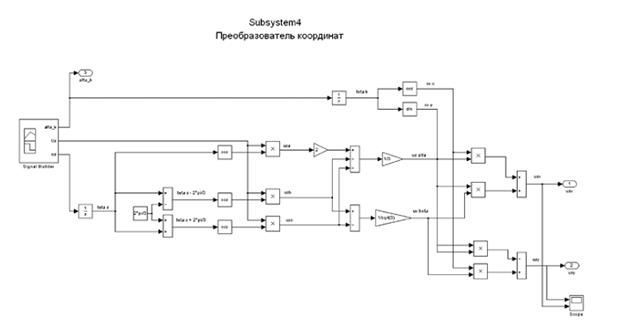
Рис. 41.Преобразователь координат
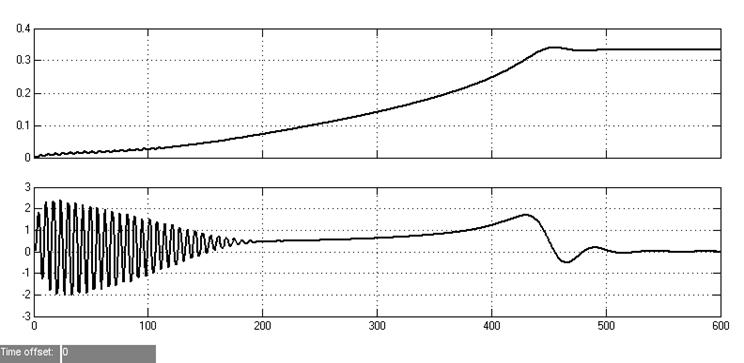
Рис. 42.График пуска АД во вращающейся системе координат
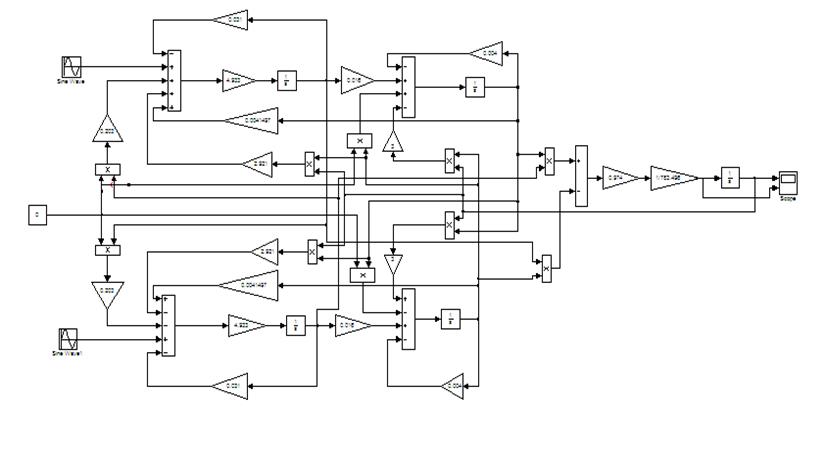
Рис. 43. Математическая модель АД во вращающейся системе координат без SubSystems
9.2 Математическая модель двигателя постоянного тока с контуром тока
Система ТПЧ-Д
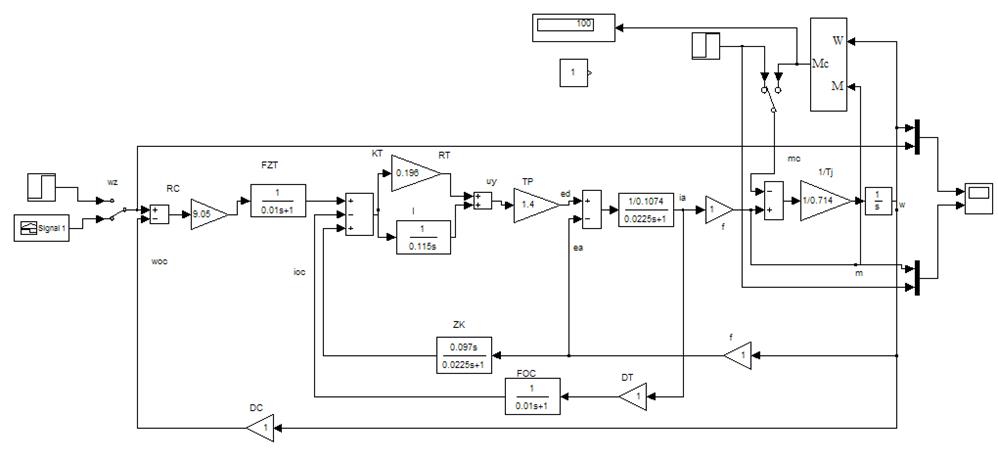
Рис. 44. Математическая модель двигателя постоянного тока с контуром тока
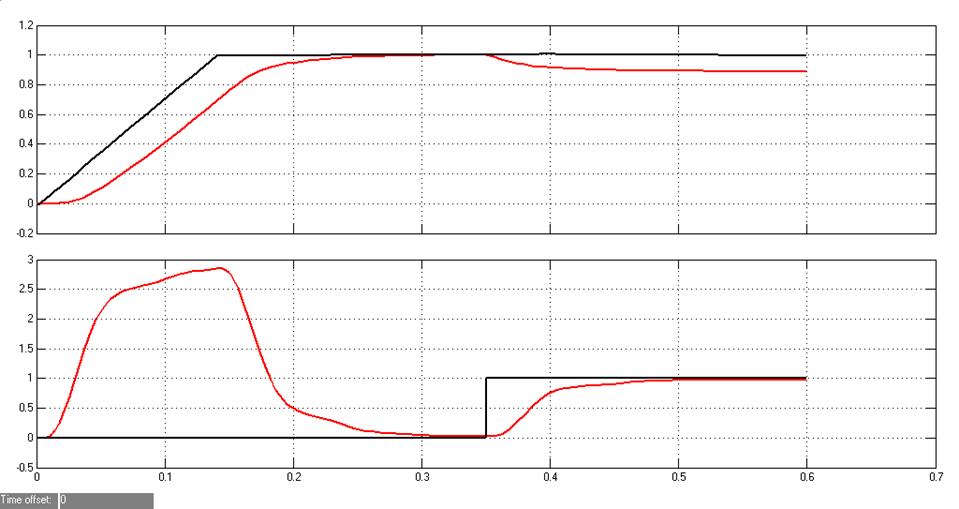
Рис. 45.График пуска ДПТ с набросом нагрузки
ЗАКЛЮЧЕНИЕ
В данном проекте спроектирован автоматизированный электропривод главного движения сталкивателя блюмов с частотным управлением. В процессе проектирования был выполнен расчет нагрузок, приведение их к валу двигателя, на основе чего выбран двигатель. Выбранный двигатель проверен по нагреву и перегрузке. Рассчитана нагрузочная диаграмма механизма и двигателя. Выполнен выбор и расчет параметров силовой части электропривода и системы управления силовым преобразователем частоты.
СПИСОК ИСПОЛЬЗУЕМЫХ ИСТОЧНИКОВ
Основная
1. Шрейнер Р.Т. Электромеханические и тепловые режимы асинхронных двигателей в системах частотного управления. Екатеринбург: ГОУ ВПО «Рос. гос. проф.-пед. ун-т», 2008. 361 с.
2. Поляков В.Н., Шрейнер Р.Т. Энергоэффективные режимы регулируемых электроприводов переменного тока: монография. Екатеринбург: ФГАОУ ВПО «Уральский федеральный университет имени первого Президента России Б.Н.Ельцина», ФГАОУ ВПО «Российский государственный профессионально-педагогический университет», 2012, 222с.
3. Шрейнер Р.Т. Электроприводы переменного тока на базе непосредственных преобразователей частоты с ШИМ: монография. Екатеринбург: ФГАОУ ВПО «Российский государственный профессионально-педагогический университет», 2012, 223с.
4. Шрейнер Р.Т. Ситемы подчиненного регулирования электроприводов: Учеб. пособие: Изд-во ГОУ ВПО «Ро. Гос. Проф.-пед. ун-т», 2008. 279 с.
5. Емельянов А.А., Клишин А.В., Медведев А.В. Математическая модель АД в неподвижной системе координат с переменными  [Текст] / Молодой ученый. – 2010. -№4. – С. 8-24.
[Текст] / Молодой ученый. – 2010. -№4. – С. 8-24.
6. Емельянов А.А., Медведев А.В., Кобзев А.В. Математическая модель асинхронного двигателя во вращающейся системе координат с переменными  [Текст] / Молодой ученый. – 2011. -№5. – С. 7-15.
[Текст] / Молодой ученый. – 2011. -№5. – С. 7-15.
Дополнительная
7. Шрейнер Р. Т. Математическое моделирование электроприводов переменного тока с полупроводниковыми преобразователями частоты. Екатеринбург: УРО РАН, 2000. 654 с.
8. Справочник по автоматизированному электроприводу / Под ред.В.А Елисеева, А.В.Шинянского. - М.: Энергоатомиздат, 1983.
9. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учеб. пособие для студ. высш. учеб. заведений
10. Г.Г. Соколовский. - М.: Издательский центр «Академия», 2006. - 272 с.