МИНИСТЕРСТВО ОБРАЗОВАНИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
УЧРЕЖДЕНИЕ ОБРАЗОВАНИЯ
Брестский государственный технический университет
Кафедра сопротивления материалов и теоретической механики
ЗАДАНИЯ И МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К выполнению расчетно-графических работ
По теоретической механике
Раздел «Статика»
для студентов механических специальностей
1 - 36 01 01 – «Технология машиностроения»,
1 - 36 01 03 – «Технологическое оборудование машиностроительного производства», 1 - 37 01 07 – «Автосервис»,
1 - 37 01 06 – «Техническая эксплуатация автомобилей»

Брест 2010
УДК 620.10
Теоретическая механика является одной из основных общетехнических дисциплин, которая является базой для изучения специальных дисциплин при подготовке квалифицированных инженеров механических специальностей. Для приобретения навыков инженерных расчетов студенты выполняют расчетно-графические работы по основным разделам курса.
Настоящие методические указания содержат краткий теоретический материал по разделу «Статика», соответствующий программе курса, и условия заданий для выполнения расчетно-графических работ.
Составители: А.И. Веремейчик, доцент
В.М. Хвисевич, доцент
Б.Г. Холодарь, доцент
Рецензент: кафедра теоретической механики БНТУ
Учреждение образования
Ó Брестский государственный технический университет, 2010
CОДЕРЖАНИЕ
Введение……………………………………………………………………....3
Указания по оформлению расчетно-графических работ…………………..3
1 Произвольная плоская система сил. Равновесие систем тел…………….4
1.1 Краткие теоретические сведения………………………………………..5
1.2 Примеры расчета………………………………………………………….6
2. Равновесие тела, находящегося под действием произвольной пространственной системы сил…………….…………………………….….12
2.1 Краткие теоретические сведения………………………………………..12
2.2 Пример расчета……………………………………………..………...…..16
3 Равновесие тел с учетом сил трения………………………………………18
3.1 Основные положения………………………………………..……………18
3.2 Пример расчета……………………………………………..………...…...20
4 Центр тяжести………………………………………………………………23
4.1 Краткие теоретические сведения………………………………………..23
4.2 Пример расчета……………………………………………..………...…..24
5 Условия заданий к расчетно-графическим работам……………………..27
Контрольные вопросы………………………………………………………..55
Список литературы…………………………………………………………...57
ВВЕДЕНИЕ
Решение, оформление и защита расчетно-графических работ являются элементами самостоятельной работы студентов и призваны помочь им в усвоении соответствующего раздела курса. Перед выполнением работы не-обходимо изучить теоретический материал, проработать с помощью учебников и пособий практические способы решения задач по данной теме, проверить усвоение материала с помощью ответов на контрольные вопросы, научиться на конкретных примерах применять имеющиеся методики решения и выбирать оптимальные из них.
При защите расчетно-графической работы необходимо ответить на вопросы, связанные с ее выполнением, и решить контрольные задачи по ее тематике.
УКАЗАНИЯ ПО ОФОРМЛЕНИЮ РАСЧЕТНО-ГРАФИЧЕСКИХ РАБОТ
1. Расчетно-графические работы выполняются на стандартных листах формата А4 (210 х 297мм) со штампом 15 мм и указанием нумерации страниц.
2. Порядок оформления: титульный лист с указанием варианта; задание с указанием исходных данных и схем конструкций; текст решения с необходимыми пояснениями и схемами; выводы; перечень литературы.
3. Чертежи и схемы выполняются с соблюдением правил графики и масштабов стандарта УО «БрГТУ».
4. Текстовая часть выполняется в соответствии с требованиями к оформлению текстовых документов. Расчеты выполняются в общем виде, в полученные выражения подставляются значения входящих в них величин, записывается числовой результат с указанием размерности ответа. Все вычисления производятся в десятичных дробях с точностью до трех-четырех значащих цифр.
5. Для наглядности и удобства схемы и графики можно выполнять на миллиметровой бумаге соответствующего формата.
6. Все рисунки (схемы, графики и т.д.) должны быть пронумерованы, обозначены, упомянуты в тексте.
Произвольная плоская система сил. Равновесие систем тел
Краткие теоретические сведения
Под произвольной плоской системой сил понимают совокупность сил, расположенных в одной плоскости, линии действия которых не пересекаются в одной точке. Произвольную плоскую систему сил можно значительно упростить, приведя силы к одному центру приведения О, в результате чего в этом центре будет приложена сила  , называемая главным вектором, и к телу в целом будет приложена пара сил с моментом МО, называемым главным моментом относительно этого центра.
, называемая главным вектором, и к телу в целом будет приложена пара сил с моментом МО, называемым главным моментом относительно этого центра.
Главный вектор равен геометрической сумме сил, входящих в данную систему, а главный момент МО - алгебраической сумме моментов сил относительно центра приведения, включая и алгебраическую сумму моментов пар сил:
 ,
, 
Численное значение главного вектора определяется по его проекциям на координатные оси:
 ,
,
где  и
и 
Направление главного вектора находят по косинусам направляющих углов:


где  ,
,  - орты осей О х и О у.
- орты осей О х и О у.
Условиями равновесия тела под действием произвольной плоской системы сил являются равенство нулю главного вектора и главного момента относительно любого центра О:
= 0 и МО = 0.
Эти условия выполняются, если
 (1)
(1)
Уравнения (1) называются основными уравнениями равновесия. Существуют еще две формы уравнений равновесия:
 (2)
(2)
 (3)
(3)
В системе уравнений (2) ось х не должна быть перпендикулярной к прямой, проходящей через центры А и В, а центры А, В и С в системе (3) не должны лежать на одной прямой.
Системой тел называется конструкция, состоящая из нескольких твердых тел, взаимодействующих между собой благодаря наличию внутренних связей (шарнирные связи, стержневые связи и т.д.).
Силы, действующие на тела системы, делятся на внешние и внутренние. Внешними называются силы, действующие на тела механической системы со стороны тел, не принадлежащих этой системе. Внутренними называются силы взаимодействия между телами рассматриваемой системы.
При равновесии системы тел каждое тело также находится в равновесии. В связи с этим имеется два способа решения задач, связанных с исследованием равновесия системы тел.
1. Поскольку каждое тело системы находится в равновесии, то составляются уравнения равновесия каждого из тел (тогда уравнения равновесия системы в целом могут быть использованы для проверки правильности решения).
2. Сначала записываются уравнения равновесия системы в целом, а затем уравнения равновесия отдельных тел системы (в этом случае нет необходимости в составлении уравнений равновесия по крайней мере одного из тел системы, но они могут быть применены для проверки).
При составлении уравнений равновесия для всей системы в целом она рассматривается как абсолютно твердое тело, поэтому в эти уравнения не войдут силы взаимодействия между отдельными телами системы. Силы, с которыми тела системы действуют друг на друга, называют реакциями внутренних связей и в соответствии с аксиомой о действии и противодействии (третий закон Ньютона), равны по модулю и направлены по одной прямой в противоположные стороны. Если внешняя сила приложена к точке контакта исследуемых тел, ее следует прикладывать только к одному из тел системы, либо распределить между контактирующими телами так, чтобы сохранялась величина и направление данной силы.
Вид и направление реактивных силовых факторов соответствует характеру запрещаемых связью движений.
Примеры расчета
Пример 1
На рис. 1 показаны три способа закрепления бруса, ось которого является ломаной линией. Задаваемая нагрузка и размеры во всех случаях одинаковы. Составить уравнения равновесия для определения реакций опор для всех случаев закрепления. Для схемы (в) провести расчет реакций связей с проверкой полученных результатов.

Рис. 1. Схемы закрепления ломаного стержня
Дано: P=20 кН; M=5 кН∙м; q=10 кН/м; a =1,5 м; b =2 м; α=450; β=300.
Решение:
Рассмотрим решение каждой из схем в отдельности. Реакции связей в точках А и В заменим соответствующими силами. Равномерно распределенную нагрузку интенсивности q заменим сосредоточенной силой, равной по модулю  , проходящей через центр тяжести прямоугольника, ограничивающего распределенную нагрузку. Направление вектора
, проходящей через центр тяжести прямоугольника, ограничивающего распределенную нагрузку. Направление вектора  соответствует направлению распределенной нагрузки.
соответствует направлению распределенной нагрузки.
Схема а) Реакцию невесомого стержня в точке В направляем вдоль стержня. Шарнирно-неподвижную опору в точке А разложим на составляющие  в направлении соответствующих координатных осей (рис. 2).
в направлении соответствующих координатных осей (рис. 2).

Рис. 2. Расчетная схема
Для определения трех неизвестных реакций связей составляем уравнения равновесия:

Схема б) Реакцию шарнирно-подвижной опоры в точке В направляем по нормали к опорной поверхности. Скользящую заделку в точке А заменяем силой  , направленной перпендикулярно оси стержня, и парой сил с моментом МА (рис. 3).
, направленной перпендикулярно оси стержня, и парой сил с моментом МА (рис. 3).

Рис. 3. Расчетная схема
Для определения неизвестных реакций связей составляем уравнения равновесия:

Схема в) Реакция жесткой заделки в точке А включает силу  и пару сил
и пару сил  . Силу раскладываем на 2 составляющие (рис. 4).
. Силу раскладываем на 2 составляющие (рис. 4).

Рис. 4. Расчетная схема
Для определения неизвестных реакций связей составляем уравнения равновесия:

Решаем полученную систему уравнений, учитывая, что  кН:
кН:
 кН;
кН;
 кН;
кН;
 кН∙м.
кН∙м.
Для проверки полученных результатов составим проверочное уравнение моментов относительно точки В:

что подтверждает правильность проведенных расчетов.
Ответ:  кН;
кН;  кН;
кН;  кН∙м. Направление силы противоположно показанному на рисунке.
кН∙м. Направление силы противоположно показанному на рисунке.
Пример 2
Определить реакции связей в точках А и В, а также давление в шарнире С. Исходная схема представлена на рис. 5. На составную конструкцию наложены связи в точках А (подвижный шарнир) и В (жесткая заделка).

Рис. 5. Исходная схема составной рамы
Дано: схема составной рамы (рис. 5), F= 20 кН; q= 6 кН/м; M= 18 кН×м; a= 60°; b= 30°; а= 2 м.
Решение:
Рассмотрим равновесие рамы под действием заданных сил и реакций опор. Для этого выберем оси координат xy и заменим связи в точках А и В соответствующими реакциями (рис. 6). Реакция  шарнирно-подвижной опоры А приложена в точке А и направлена перпендикулярно опорной плоскости, реакцию жесткой заделки в точке В заменяем двумя ее составляющими
шарнирно-подвижной опоры А приложена в точке А и направлена перпендикулярно опорной плоскости, реакцию жесткой заделки в точке В заменяем двумя ее составляющими  и реактивным моментом
и реактивным моментом  . Действующую на раму распределенную нагрузку интенсивностью q заменим равнодействующей
. Действующую на раму распределенную нагрузку интенсивностью q заменим равнодействующей  , модуль которой равен:
, модуль которой равен:

Рама находится в равновесии под действием произвольной плоской системы сил, для которой можно составить три уравнения равновесия, в то время как определению подлежат четыре неизвестные реакции. Расчленим раму на части и рассмотрим равновесие каждой из них. При этом действие частей рамы друг на друга заменим составляющими реакции внутренней связи в шарнире С  (рис. 7).
(рис. 7).
По аксиоме равенства действия и противодействия эти реакции противоположно направлены и равны по модулю:
 (4)
(4)
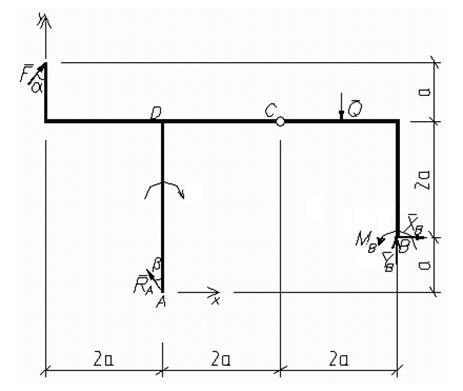
Рис. 6. Расчетная схема

Рис. 7. Расчетные схемы элементов составной рамы
Составим уравнения равновесия плоской произвольной системы сил, приложенных к левой части рамы (рис. 7):
 (5)
(5)
Здесь при определении моментов сил  и
и  была применена теорема Вариньона (момент силы относительно точки равен сумме моментов составляющих этой силы относительно этой же точки).
была применена теорема Вариньона (момент силы относительно точки равен сумме моментов составляющих этой силы относительно этой же точки).
Выразив из последнего уравнения  и подставив полученное значение в два предыдущих, получим:
и подставив полученное значение в два предыдущих, получим:
 Составим теперь уравнения равновесия для плоской произвольной системы сил, приложенных к правой части рамы (рис. 7). Учитывая равенства (4), получим:
Составим теперь уравнения равновесия для плоской произвольной системы сил, приложенных к правой части рамы (рис. 7). Учитывая равенства (4), получим:
 (6)
(6)
Выражая из уравнений (6) неизвестные реакции и подставляя числовые значения, будем иметь:

Для проверки правильности решения составим уравнение равновесия для системы сил, приложенных ко всей раме (уравнение моментов относительно точки D):

Относительная погрешность:

Проверка показала, что реакции определены верно.
Ответ: 

 Знаки показывают, что реакции
Знаки показывают, что реакции  имеют направление, противоположное показанному на рис. 6, 7.
имеют направление, противоположное показанному на рис. 6, 7.