Синтез одноконтурной астатической системы
Стабилизации скорости
 |
Одноконтурная система отличается простотой структуры и с ее помощью может быть получено достаточно высокое быстродействие [2].
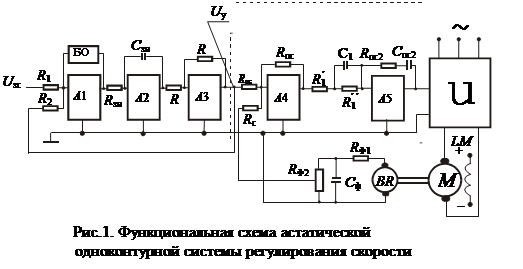
Функциональная схема такой системы представлена на рис.1. Она включает в себя силовую часть в виде ДПТ М, получающего питание от силового преобразователя и управляющую часть в виде регулятора скорости, состоящего из суммирующего усилителя А4 и регулятора на усилителе А5. В качестве датчика скорости используется тахогенератор BR постоянного тока со сглаживающим фильтром на R Ф1, R Ф2 и С Ф. С целью задания допустимого темпа разгона и торможения использован задатчик интенсивности, формирующий на выходе А3 линейно – нарастающее напряжение при ступенчатой форме входного сигнала U зс. Задатчик включает в себя усилитель А1 с высоким коэффициентом усиления, интегратор А2 и инвертирующий усилитель А3. Предельное напряжение усилителя А1 ограничено блоком ограничения БО значением U з.огр. Если на вход задатчика интенсивности поступает ступенчатый сигнал U зс, на выходе А3 сразу уста–
 навливается U з.огр, а напряжение интегратора меняется в соответствии с выражением U 2 =U з.огр t/Т и, где Т и =R зи С из.
навливается U з.огр, а напряжение интегратора меняется в соответствии с выражением U 2 =U з.огр t/Т и, где Т и =R зи С из.
Ускорение при разгоне и торможении двигателя определяется темпом изменения U у  Значение ускорения должно быть выбрано таким образом, чтобы ток при заданном ускорении не превышал допустимого значения.
Значение ускорения должно быть выбрано таким образом, чтобы ток при заданном ускорении не превышал допустимого значения.
Расчет параметров регулятора скорости выполняется в следующей последовательности:
а) определяем соотношение между R зс и R с суммирующего усилителя А4:  , где U з ном, wном - соответственно номинальное задающее напряжение и номинальная угловая скорость вращения двигателя; k с - передаточный коэффициент тахогенератора.
, где U з ном, wном - соответственно номинальное задающее напряжение и номинальная угловая скорость вращения двигателя; k с - передаточный коэффициент тахогенератора.
б) для непрерывного тока якоря структурная схема системы приведена на рис.2, где звено с коэффициентом R с /R зс учитывает разницу в коэффициентах передачи регулятора скорости по каналу задания скорости и каналу обратной связи. Осуществляя оптимизацию системы на технический оптимум [2], получим передаточную функцию регулятора скорости:  , где Т m =Т п +Т с − некомпенсируемая постоянная времени; Т 1 и Т 2 выбираются из условия: T м T э p2+T м p+ 1 =(T 1 p+ 1 )(T 2 p+ 1 ), если T м >4T э, или
, где Т m =Т п +Т с − некомпенсируемая постоянная времени; Т 1 и Т 2 выбираются из условия: T м T э p2+T м p+ 1 =(T 1 p+ 1 )(T 2 p+ 1 ), если T м >4T э, или  , если T м <4T э, k с − коэффициент передачи тахогенератора.
, если T м <4T э, k с − коэффициент передачи тахогенератора.
Регулятор скорости, представляющий собой ПИД − регулятор, выполняется на усилителях А4 и А5 (рис.2). Параметры ПИД − регулятора (А5) выбираются и  рассчитываются в соответствии с полученным выражением W рс(р) и передаточной функцией операционного усилителя, охваченного частотно – зависимой обратной связью
рассчитываются в соответствии с полученным выражением W рс(р) и передаточной функцией операционного усилителя, охваченного частотно – зависимой обратной связью
 .
.




 Сравнивая две передаточные функции регулятора скорости, записываем систему уравнений для определения величин конденсаторов и резисторов, необходимых при реализации регулятора скорости,
Сравнивая две передаточные функции регулятора скорости, записываем систему уравнений для определения величин конденсаторов и резисторов, необходимых при реализации регулятора скорости,
R ос С ос =Т 1,  ,
,  ,
,  .
.
Так как число неизвестных превышает число уравнений, то задаемся величиной емкости Сос и определяем R ос =Т 1 /С ос, затем находим  . Обычно коэффициент передачи k рсреализуют на суммирующем усилителе А 4, а k рсдля ПИД – регуляторапринимают равным единице. С учетом того, что
. Обычно коэффициент передачи k рсреализуют на суммирующем усилителе А 4, а k рсдля ПИД – регуляторапринимают равным единице. С учетом того, что  , из последнего уравнения после преобразований находим
, из последнего уравнения после преобразований находим  .Окончательно из условия
.Окончательно из условия  находим емкость С 1.
находим емкость С 1.
Пример расчета астатической системы регулирования скорости.
Электродвигатель ПБСТ-42 имеет следующие данные: Р ном=3,5 кВт; n ном=3000 об/мин; U ном=110 В; I ном=37 А; R э=0,677 Ом; Т э=0,01 с; Т м=0,1 с. Тиристорный преобразователь: k п = 27,5; Т п = 0,008 с. Тахогенератор: k с = 0,18 Вс/рад; Т с = 0,005 с,  с, C =0,27 Вс.
с, C =0,27 Вс.
Так как Т м > 4 Т э, то Т м Т э p2+Т м p+ 1 = (Т 1 p+ 1)(Т 2 p+ 1). При Т м ³ 10 Т эможно считать, что Т1=Т м; Т2=Т э; Тm=Т э +Т с.. Длярассматриваемого примера находим Т 1=0,0887с, Т 2 = 0,0112с.
Определим  и найдем передаточную функцию регулятора скорости
и найдем передаточную функцию регулятора скорости 
Зададимся емкостью конденсатора С 1=10-6 Ф, тогда опрерделим R ос= Т 1/ С ос=0,0887/10-6=88700 Ом=88,7 кОм,  кОм,
кОм,  кОм, С 1 = Т 2/
кОм, С 1 = Т 2/  = 0,0112/79,83 = 1,4×10-7 = 0,14 мкФ. При расчете учтем, что коэффициент k рс = 0,186реализован на сумматоре А4.
= 0,0112/79,83 = 1,4×10-7 = 0,14 мкФ. При расчете учтем, что коэффициент k рс = 0,186реализован на сумматоре А4.
Расчет переходных процессов в системе с целью проверки выполненного расчета может быть выполнен по структурной схеме методом численного моделирования на ЭВМ.
Синтез систем стабилизации скорости ДПТ с подчиненным регулированием координат
Функциональная схема системы подчиненного регулирования скорости с отрицательной обратной связью по скорости представлена на рис.3. Схема состоит из ДПТ с независимым возбуждением М, питающимся от тиристорного или широтно импульсного преобразователя U, регуляторов тока и скорости, выполненных на операционных усилителях А 2 и А 1, а также датчиков тока UА и скорости BR (тахогенератора). ДПТ совместно с тиристорным преобразователем и системой импульсно-фазового управления (СИФУ) представляют собой объект управления. На вход СИФУ подается напряжение управление U у с выхода регулятора тока (РТ), настраиваемого на технический оптимум [8]. На входе РТ алгебраически суммируются сигналы U зт и U от, представляющие собой выходные напряжения соответственно регулятора скорости (РС) и датчика тока.
 |
Благодаря включению в цепь обратной связи регулятора скорости стабилитронов VD 1¸2, выходное напряжение РС ограничено величиной U зтmax, определяющей предельно допустимый ток якоря двигателя I max.
Регулятор скорости может настраиваться на технический либо симметричный оптимум, выбор метода оптимизации зависит от требований к жесткости механических характеристик электропривода [1].
При настройке контура скорости на технический оптимум используется пропорциональный регулятор скорости (П–регулятор). Система относительно основного возмущения (момента нагрузки) в этом случае является статической. Статическое отклонение скорости Dwс может быть соизмеримым со статическим отклонением скорости Dwр разомкнутой системы, так как Dwс=Dwр4 Тμ/Т м, где Т m− некомпенсируемая постоянная времени контура скорости, Т м − механическая постоянная времени. Такое  отклонение скорости может оказаться неприемлемым при большом диапазоне регулирования.
отклонение скорости может оказаться неприемлемым при большом диапазоне регулирования.
При настройке контура регулирования скорости на симметричный оптимум [7] система становится астатической относительно возмущающего воздействия. Отклонение скорости от заданного значения для такой системы в установившемся режиме независимо от нагрузки равно нулю.
.  Система регулирования скорости в ряде случаев может иметь задатчик интенсивности (см. ранее п.1), который обеспечивает постоянство ускорения во время переходного процесса при любом значении статического момента.
Система регулирования скорости в ряде случаев может иметь задатчик интенсивности (см. ранее п.1), который обеспечивает постоянство ускорения во время переходного процесса при любом значении статического момента.
Структурная схема системы подчиненного регулирования скорости представлена на рис.4. Передаточные функции регуляторов тока и скорости W рт(р) и W рс(р) выбираются в зависимости от принятого метода оптимизации. В табл.1 приведены передаточные функции регуляторов тока и скорости, замкнутого контура регулирования по управляющему и возмущающему воздействиям.
Таблица 1
| Наиме–нование контура | Наст–ройка контура | Передаточные функции регулятора и замкну– того контура по управляющему и возмущаю– щему воздействиям |
| Контур тока | ТО | 

|
| Контур скоро– сти | ТО | 


|
| Контур скоро– сти | СО | 


|
Эквивалентная (некомпенсируемая) постоянная времени Тm является основным параметром, определяющим динамику системы. Она зависит от малых по величине некомпенсируемых постоянных времени и может быть определена по формуле [2]:  , где Т пк - сумма постоянных времени (некомпенсируемых) инерционных звеньев в прямом канале; Т ос - сумма постоянных времени фильтров в цепях обратных связей.
, где Т пк - сумма постоянных времени (некомпенсируемых) инерционных звеньев в прямом канале; Т ос - сумма постоянных времени фильтров в цепях обратных связей.
Система подчиненного регулирования скорости содержит контур регулирования тока и контур регулирования скорости, поэтому в соответствии с выражением для Т μ, записанным выше, получим  , где Т п - постоянная времени тиристорного преобразователя; Т дт, Т дс - постоянные времени датчика тока и датчика скорости..
, где Т п - постоянная времени тиристорного преобразователя; Т дт, Т дс - постоянные времени датчика тока и датчика скорости..
Управляющие сигналы U зт и U у на выходах регуляторов тока и скорости, а также U зс должны быть ограничены величиной максимального выходного напряжения U max усилителей, используемых в регуляторах. С другой стороны эти напряжения обеспечивают задание допустимого значения скорости, тока и напряжения преобразователя. Коэффициенты обратной связи по скорости k с и по току k т рассчитываются с учетом приведения напряжений обратной связи к напряжению задания, что учитывается на структурной схеме (рис. 4) введением блоков с передаточными коэффициентами R зт /R т и R зс /R с.
Коэффициенты передачи обратной связи по скорости и току равны с учетом приведения соответственно k с =k дс R зс /R с, k т =k дт R зт /R т. Кроме того, необходимо при расчете k с и k тучитывать возможность ограничения переменных. Здесь используется способ ограничения переменных заданием их значений на входе соответствующего контура регулирования. Наибольшее значение тока якоря будет задано, если на входе появится сигнал U зт =U max. Тогда в установившемся режиме I max k т =U max, то есть k т =U max /I max, что при известном коэффициенте передачи датчика тока k дт, позволяет определить соотношение R зт /R т =k т /k дт.
Настройка контура тока на ТО при пренебрежении действия обратной связи по ЭДС двигателя приводит к получению ПИ-регулятора (табл.1). По табл.1 можно определить передаточную функцию замкнутого оптимизированного контура тока, а переходная функция для  ,где I уст =U зт /k т, может быть определена по табл.2 для n =1.
,где I уст =U зт /k т, может быть определена по табл.2 для n =1.
При настройке контура скорости на ТО получается однократно интегрирующая система, в которой регулятор имеет пропорциональный характер (табл.1). Система является статической по отношению основного возмущающего воздействия и имеет электромеханическую характеристику следующего вида:
| Таблица 2 | |||
| № кон– тура | Передаточная Ф(р) и переходная h(t) функции оптимизированного контура | Время регул. tр, с | Пере– регул. σ, % |

 , где , где 
| 4,1 T μ | 4,3 | |


| 7 T μ | 8,0 | |


| 13,6 T μ | 6,2 |
 , определяемую статическим падением скорости в разомкнутой системе DwР =I с R э /С и отношением 4 Т m /Т м. Переходный процесс при единичном скачке задания для относительной скорости
, определяемую статическим падением скорости в разомкнутой системе DwР =I с R э /С и отношением 4 Т m /Т м. Переходный процесс при единичном скачке задания для относительной скорости
w =w/wуст, где wуст =U зс /k определяется формулой, приведенной в табл.2 (при n=2).
Передаточная функция однократно интегрирующей системы относительно тока якоря по управляющему воздействию имеет вид:  . Соответствующее уравнение переходного процесса тока:
. Соответствующее уравнение переходного процесса тока:
 , где
, где  .
.
В однократно интегрирующей системе с пропорциональным регулятором скорости передаточные функции системы по возмущающему воздействию относительно тока и скорости равны:
 ;
;
 .
.
При ударном приложении нагрузки на величину DI c им соответствуют переходные процессы тока и скорости:
 ;
;
 ;
;
гдеDwс =R э DI с4 T m /СT м - статический перепад скорости, соответствующий изменению тока D I с.
При настройке контура скорости на симметричный оптимум (СО) получается двухкратно интегрирующая система, в которой используется ПИ-регулятор скорости. Передаточные функции регулятора скорости и замкнутого контура регулирования скорости определяются по табл.1. Уравнение переходного процесса по управляющему воздействию имеет вид  , где
, где  .
.
Переходный процесс имеет форсированный колебательный характер с перерегулированием s=53%.
Уравнение переходного процесса тока по управляющему воздействию:  .
.
Для исключения форсирующего действия ПИ-регулятора скорости на вход системы включается апериодическое звено с передаточной функцией  . Тогда передаточную функцию скорости по управлению получаем из табл.2 для n= 3. Переходный процесс скорости колебательный с s=6,2% и t р = 13,6 T m. Уравнение тока при этом имеет вид:
. Тогда передаточную функцию скорости по управлению получаем из табл.2 для n= 3. Переходный процесс скорости колебательный с s=6,2% и t р = 13,6 T m. Уравнение тока при этом имеет вид:
 ..
..
В двухкратно- интегрирующей системе с ПИ-регулятором скорости передаточные функции системы по управляющему воздействию относительно тока и скорости равны
 ;
;
 .
.
Им соответствуют уравнения переходных процессов тока и скорости:  ;
;
 .
.
Приведенные уравнения координат ЭП позволяют выполнить построение переходных процессов расчетным путем в линейной системе подчиненного регулирования. Переходные процессы в условиях ограничения координат обычно получают методом структурного моделирования с помощью пакетов прикладных программ SIAM, MATLAB или других.
Пример расчета параметров унифицированного и подчиненного контуров регулирования момента и скорости в системе тиристорный преобразователь–двигатель постоянного тока.
Исходные данные двигателя: Р ном=30 кВт, U ном=220 В, I ном=147 А, ωном=157 с-1, кратность пускового тока l=2, суммарное сопротивление якоря R я = 0,045 Ом, приведенный момент инерции J= 1,3кг×м2, электромагнитная постоянная времени Т э = 0,06 с.
Для питания двигателя используется реверсивный ТП: U ном = 230 В, I ном = 300 А, U у max = 10 В. суммарное эквивалентное сопротивление силовой цепи преобразователя R пр = 0,06 Ом.
В цепь якоря включен шунт 200 А, 75 мВ, коэффициент передачи усилителя датчика тока k у. = 50, постоянная времени фильтра на выходе датчика тока Т дт = 0,003 c, постоянная времени на выходе датчика скорости Т дс = 0,003 c.
При Ф=Фному ДПТ момент M=СI я, поэтому практически для регулирования момента используется жесткая обратная связь по току якоря.
Структурная схема системы регулирования подчиненного регулирования тока приведена на рис.4. Определим параметры схемы. Коэффициент усиления преобразователя k п =U ном /U у max = 230/10=23.Суммарное сопротивление якорной цепи R э=1,1(R я+ R пр)=1,1×(0,045+0,06)=0,116 Ом, где коэффициент 1,1 учитывает сопротивление соединительных проводов.
Рассчитаем постоянную времени тиристорного преобразователя
 , где Т ф– постоянная времени фильтра на входе СИФУ, m2– пульсность преобразователя, f с– частота сети, таким образом, найдем
, где Т ф– постоянная времени фильтра на входе СИФУ, m2– пульсность преобразователя, f с– частота сети, таким образом, найдем
 c
c
Определим некомпенсируемую постоянную времени с учетом постоянных времени Т дт и Т дс
 c..
c..
В соответствии с заданием Т э = 0,06 с. Передаточные функции объекта регулирования контура тока равна  и регулятора (табл 1) –
и регулятора (табл 1) –  , где
, где  .
.
На основе равенства полученной передаточной функции регулятора тока и передаточной функции охваченного частотно зависимой обратной связью усилителя А 2 (рис.4), реализующего регулятор тока, запишем следующие уравнения
R ост С ост = Т э,
 ,
,
 .
.
Подставим выражение k т в Т и и получим  .
.
Определим соотношение между R зт и R от. Для этого вычислим
 Ом.
Ом.
Затем запишем условие для установившегося состояния
U зт max - k T I max = 0, U зт max k дт (R зт /R от )I max = 0. Примем I max = 2 I ном = 300 А и U зт max = 10 В, найдем 
Определим сопротивления  и
и  , зададимся С ост = 1 мкФ, затем определяем величины сопротивлений
, зададимся С ост = 1 мкФ, затем определяем величины сопротивлений
 кОм;
кОм;  Ом=90кОм,
Ом=90кОм,
Rзт=Rот×1,78=90×1,78»158 кОм.
Определим параметры структурной схемы регулятора тока (рис.4):  Ом,
Ом,
 c
c
Пропорциональный коэффициент усиления регулятора k рт =R ост /R зт =Т э /Т и = 60/158=0,38. Передаточная функция регулятора тока
 .
.
Максимальное напряжение задания тока 10 В. Дополним контур регулирования тока контуром регулирования скорости, настроенным на технический оптимум. Регулятор скорости имеет схему пропорционального регулятора, показанного на рис.4. Определим следующие параметры, необходимые для дальнейших расчетов: максимальная скорость идеального х/х w0 =182,4 рад/c, коэффициент ЭДС тахогенератора k тг = 0,6 В×с, коэффициент ЭДС двигателя 
 , стопорный момент двигателя М ст =СI max = 1,36×294=400 нм, э лектромеханическая постоянная времени T м =JR э /C2= 1,3×0,116/(1,36)2=0,0815 с.
, стопорный момент двигателя М ст =СI max = 1,36×294=400 нм, э лектромеханическая постоянная времени T м =JR э /C2= 1,3×0,116/(1,36)2=0,0815 с.
Для установившегося состояния при скорости идеального холостого хода w0 можно записать равенство U зс max − k сw0=0. Подставляя выражение для k с =k тг R зс /R ос, получим  , откуда найдем
, откуда найдем  .
.