Двухзонная система регулирования скорости широко применяется для двигателей главного движения металлорежущими станками. Она построена таким образом, что регулирование до основной скорости производится при полном потоке возбуждения двигателя. При скорости выше номинальной регулирование осуществляется изменением тока возбуждения при номинальной ЭДС [1].
Система регулирования может быть разбита на две части: систему регулирования скорости, содержащую внутренний контур регулирования тока якоря и внешний контур регулирования скорости, и систему регулирования ЭДС, управляющую потоком возбуждением двигателя.
 Функциональная схема регулирования ЭДС представлена на рис.5. Обмотка возбуждения LМ двигателя питается от тиристорного возбудителя (транзисторного). Система регулирования ЭДС включает в себя подчиненный контур регулирования тока возбуждения с регулятором РТВ. Этот контур замкнут по выходному напряжению датчика тока возбуждения, причем на входе РТВ по каналу обратной связи предусмотрен фильтр с постоянной времени Т вт, образованный резисторами
Функциональная схема регулирования ЭДС представлена на рис.5. Обмотка возбуждения LМ двигателя питается от тиристорного возбудителя (транзисторного). Система регулирования ЭДС включает в себя подчиненный контур регулирования тока возбуждения с регулятором РТВ. Этот контур замкнут по выходному напряжению датчика тока возбуждения, причем на входе РТВ по каналу обратной связи предусмотрен фильтр с постоянной времени Т вт, образованный резисторами  и
и  и конденсатором С тв. Входным сигналом для контура тока возбуждения является выходное напряжение регулятора ЭДС. Последнее ограничено с помощью стабилитрона VД 1 до значения U зтв max, cоответствующего номинальному току возбуждения. На входе регулятора ЭДС сравниваются постоянное значение задающего напряжения U зэ с напряжением датчика ЭДС.
и конденсатором С тв. Входным сигналом для контура тока возбуждения является выходное напряжение регулятора ЭДС. Последнее ограничено с помощью стабилитрона VД 1 до значения U зтв max, cоответствующего номинальному току возбуждения. На входе регулятора ЭДС сравниваются постоянное значение задающего напряжения U зэ с напряжением датчика ЭДС.
Датчик ЭДС представляет собой суммирующий усилитель, на один вход которого через фильтр  ,
, 
 и С 1подается напряжение U дн датчика напряжения (ДН), а на второй - с резистором R2 - напряжение U дтя (ДТЯ). Напряжение на выходе усилителя датчика ЭДС равно:
и С 1подается напряжение U дн датчика напряжения (ДН), а на второй - с резистором R2 - напряжение U дтя (ДТЯ). Напряжение на выходе усилителя датчика ЭДС равно:
 , где
, где  ,
,  − постоянная времени фильтра.
− постоянная времени фильтра.
Выбрав Т дэ =Т э, R 1 k дтя /(R 2 k дн )=R э и обозначив R ос k дн /R 1 =k дэ, запишем выходное напряжение суммирующего усилителя  . На выходе датчика ЭДС установлен блок выделения модуля U дэ, так как при реверсе двигателя напряжением на якоре сигнал на входе регулятора ЭДС РЭ не должен изменять своего знака.
. На выходе датчика ЭДС установлен блок выделения модуля U дэ, так как при реверсе двигателя напряжением на якоре сигнал на входе регулятора ЭДС РЭ не должен изменять своего знака.
Структурная схема линеаризованного контура регулирования ЭДС приведена на рис.6.
Передаточные функции регуляторов рассчитываются по общей методике систем подчиненного регулирования. Передаточная функция регулятора тока возбуждения при настройке контура регулирования тока на технический оптимум имеет вид  , где Т вт – постоянная времени контура вихревых токов; Т в - постоянная времени
, где Т вт – постоянная времени контура вихревых токов; Т в - постоянная времени
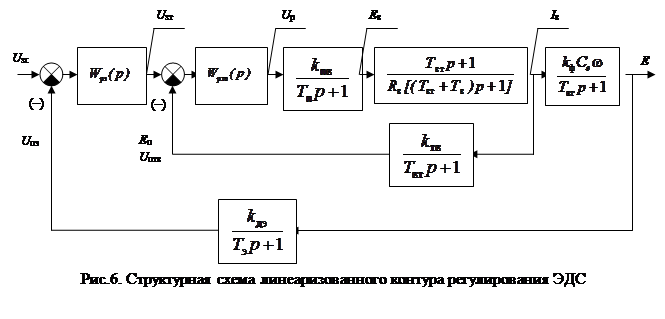 обмотки возбуждения для установившегося значения потока Ф уст; Т п - постоянная времени тиристорного преобразователя обмотки возбуждения;
обмотки возбуждения для установившегося значения потока Ф уст; Т п - постоянная времени тиристорного преобразователя обмотки возбуждения;
R в –сопротивление обмотки возбуждения;  - передаточный коэффициент обратной связи по току возбуждения; k дтв- передаточный коэффициент датчика тока возбуждения.
- передаточный коэффициент обратной связи по току возбуждения; k дтв- передаточный коэффициент датчика тока возбуждения.
Регулятор тока возбуждения имеет структуру ПИ-регулятора и может быть реализован на операционном усилителе.
Настройка контура регулирования ЭДС на технический оптимум
приводит к передаточной функции регулятора ЭДС РЭ вида
 , где
, где  − коэффициент передачи цепи магнитного потока; С е − коэффициент противо-ЭДС двигателя; ω − скорость двигателя,
− коэффициент передачи цепи магнитного потока; С е − коэффициент противо-ЭДС двигателя; ω − скорость двигателя,  - коэффициент обратной связи по ЭДС.
- коэффициент обратной связи по ЭДС.
Так как контур ЭДС содержит нелинейные звенья, то необходимо выбрать значения коэффициента k Ф и скорости двигателя ω для расчета параметров регулятора ЭДС. Рекомендуется k ф принимать постоянным, соответствующим линейному участку кривой намагничивания, а скорость ω=ωmax.
Следует отметить, что при уменьшении магнитного потока относительно номинального значения Фномпроисходит увеличение электромеханической постоянной времени Т м, вызывающей отклонение оптимальной настройки регулятора скорости во 2-ой зоне. Рекомендуется производить настройку регулятора скорости при номинальном потоке Фном.
Пример расчета. Рассчитать параметры регуляторов тока возбуждения и ЭДС для электродвигателя типа 2ПФ-200LГ со следующими параметрами: Р ном = 15 кВт; U ном = 220 В; I ном = 78,5 А; I В.ном=4 А; n ном = 750 об/мин; n max = 2500 об/мин; 2 p= 4; R в = 42 Ом; Фном = 1,77×10-2 Вб; F ном = 3520 Ав; Т в = 0,54 с(максимальное значение); Т э = 0,0035 с. Питание обмотки возбуждения от тиристорного преобразователя с коэффициентом передачи k п=25 и постоянной времени Т п=0,01 с. Коэффициент передачи датчика ЭДС k дэ=0,04, а датчика тока возбуждения k дтв=1 Ом.
Рассчитаем параметры регулятора тока возбуждения по формуле
 . Примем Т вт=0,1 Т в=0,1×0,54=0,054 c и найдем
. Примем Т вт=0,1 Т в=0,1×0,54=0,054 c и найдем  , для этого необходимо предварительно определить
, для этого необходимо предварительно определить  . Таким образом передаточная функция регулятора равна
. Таким образом передаточная функция регулятора равна  .
.
Определим величины резисторов и конденсатора, включенных в схему регулятора тока возбуждения. Для этого согласно схеме регулятора (рис.5) запишем следующую систему уравнений:
 ,
,  ,
,  .
.
Решая совместно записанные уравнения системы, находим сопротивление резисторов  ;
;  . Задаваясь емкостью С отв = 4 мкФ, определяем
. Задаваясь емкостью С отв = 4 мкФ, определяем  кОм,
кОм,  кОм,
кОм,  кОм
кОм
Рассчитаем параметры регулятора ЭДС, представляющего собой интегральный регулятор. Определим соотношение  . Примем U зэ max = 10 В и Е max=220 В и рассчитаем коэффициент приведения сигнала по ЭДС
. Примем U зэ max = 10 В и Е max=220 В и рассчитаем коэффициент приведения сигнала по ЭДС  ,
,  . Постоянная времени интегрирования регулятора ЭДС определяется по выражению
. Постоянная времени интегрирования регулятора ЭДС определяется по выражению  .
.
Для дальнейшего расчета необходимо определить коэффициент k ф для скорости, равной максимальной  рад/с.
рад/с.
Коэффициент  для линейного участка кривой намагничи-
для линейного участка кривой намагничи-
вания  . Коэффициент противо – ЭДС ДПТ
. Коэффициент противо – ЭДС ДПТ  Вс,
Вс,
 с.
с.
Рассчитаем параметры регулятора ЭДС (рис.5). Для этого запишем уравнение R зэ /R оэ = 1,25, Т и =R зэ С оэ. Примем емкость конденсатора С оэ =0,5 мкФ, тогда  Ом = 52 кОм. Следовательно,
Ом = 52 кОм. Следовательно,  Ом ≈ 42 кОм.
Ом ≈ 42 кОм.
Проверка правильности выполненных расчетов производится с помощью структурного моделирования рассчитанной системы на персональной ЭВМ.
ЛИТЕРАТУРА
1. Башарин А.В., Новиков В.А.,Соколовский Г.Г. Управление электроприводами: Учебное пособие для вузов.-Л.: Энергоиздат, 1982.
2. Анхимюк В.Л., Опейко О.Ф. Проектирование систем автоматического управления электроприводами: Учебное пособие для вузов.-Мн.:Выш.шк.,1986.
3. Электротехнический справочник. В З т. ТЗ: В 2 кн. Кн.2.Использование электрической энергии. Под общ. ред. профессоров МЭИ: И.Н.Орлова (гл.ред.) и др. -7-е изд.,испр. и доп. - М.: Энергоатомиздат, 1988.
4. Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами. Под ред. В.И.Круповича, Ю.Г.Барыбина, М.Л.Самовера.-3-е изд., перераб. и доп. - М.: Энергоиздат, 1982.
5. Башарин А.В., Постников Ю.В. Примеры расчета автоматизированного электропривода на ЭВМ: Учебное пособие для вузов.- Л.: Энергоатомиздат, 1990.
6. Перельмутер В.М., Сидоренко В.А. Системы управления тиристорными электроприводами постоянного тока. - М.: Энергоатомиздат,1988.