Маневренность автомобиля
Маневренность автомобиля характеризуется формой и размерами габаритной полосы криволинейного движения (ГПД), под которой понимается площадь опорной поверхности, ограниченной проекциями на нее траекторий крайних выступающих точек транспортного средства.
ГПД определяется применительно к круговому движению автомобиля с минимальным радиусом поворота Rп (приведен в технической характеристике автомобиля).
Построение ГПД (масштаб 1: 72) одиночного автомобиля (тягача) с При курсовом проектировании управляемыми колесами передней оси (рисунок 10.3) осуществляется следующим образом. Из центра О радиусом поворота Rп в масштабе проводим кривую траектории внешнего переднего колеса автомобиля. Затем от оси ОО1 откладываем отрезок L, равный базе транспортного средства. Проводим ось А1А. От точки пересечения оси А1А с кривой траектории внешнего переднего колеса откладываем отрезок, равный колеи передних колес. Из середины отрезка проводим перпендикуляр до пересечения с осью ОО1. Точка пересечения является серединой ведущего моста автомобиля. Отложим отрезок, равный колеи задних колес. Получим кинематическую схему ходовой части автомобиля, на которую накладываем масштабное изображение контура общего вида транспортного средства в плане. Затем из центра поворота О последовательно проводим кривые радиусами: Rо - радиус кривизны середины заднего моста; Rн - наружный радиус поворота; Rв - внутренний радиус поворота. Разность между наружным Rн и внутренним Rв радиусами поворота составляет ширину динамического коридора, т.е. ГПД. Разность между Rн и Rо является наружной составляющей Ан, между Rо и Rв - внутренней составляющей габаритной полосы движения Ав.
ГПД автопоезда с двухосным прицепом строится последовательно для каждого звена транспортного средства. На рисунке 10.4 показано ГПД автопоезда.

Рисунок - Построение ГПД автомобиля
Управляемость и устойчивость автопоезда
Управляемость автопоездов — это совокупность свойств автопоездов, характеризующих изменение параметров движения при воздействии на органы управления.
В понятие управляемости входит и маневренность, которая связана со способностью автопоезда изменять направление движения на ограниченных площадях при небольших скоростях движения. Маневренность определяет возможность безопасного проезда автопоездов на автомобильных дорогах с ограниченной шириной полосы движения, на городских улицах, строительных площадках и в местах разгрузки.
Хорошая маневренность создает удобства для погрузочно-разгрузочных работ. Плохая маневренность может стать серьезным препятствием для преодоления автопоездом стесненных участков дорог, например, лесных, проселочных, горных и т. д.
Маневренность характеризуется оценочными показателями, главными из которых являются минимальный радиус поворота, габаритный радиус поворота и габаритная полоса движения.
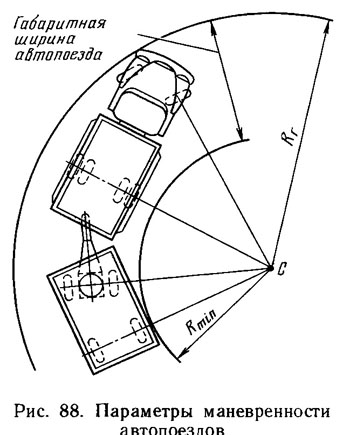
Минимальный радиус поворота автопоезда Rmin (рис. 88) определяется как расстояние от центра поворота до наиболее близкой точки автомобиля-тягача к центру поворота при максимальных углах поворота управляемых колес.
Минимальный габаритный радиус автопоезда Rr — это расстояние от центра поворота до наиболее удаленной точки автопоезда.
Оба радиуса Rmin, Rr характеризуют площадь, необходимую для маневрирования и разворота автопоезда. Чем меньше эти радиусы, тем выше маневренность автопоезда.
Габаритная полоса движения равна разности радиусов поворота точек, наиболее удаленной и наиболее близкой к центру поворота, и характеризует ширину коридора, необходимую при крутых поворотах, а также возможность движения автопоезда в проездах заданной формы и размеров.
Габаритная полоса движения автопоезда шире полосы движения одиночного автомобиля при том же радиусе поворота, так как она зависит не только от автомобиля-тягача, но и от числа прицепов (полуприцепов), их базы, длины дышла и заднего свеса. Она определяется основной траекторией автопоезда и сдвигом траекторий прицепов (полуприцепов) к центру поворота. Предельный сдвиг траектории прицепов (полуприцепов) достигается при круговом движении автопоезда. Сдвиг траекторий прицепов (полуприцепов) при движении с переменным радиусом меньше предельного сдвига. Однако аналитически определить габаритную полосу движения в этом случае трудно, поэтому при расчетах исходят из предположения, что любой поворот автопоезда является круговым, который дает наибольшую полосу, необходимую для безопасного проезда (рис. 89).

Устойчивость автопоездов — это способность их звеньев сохранять заданное водителем положение относительно опорной поверхности дороги и направление движения при воздействии внешних возмущений.
Устойчивость движения, как и управляемость, не имеет комплексного показателя оценки. На практике пользуются экспериментальными характеристиками, определяющими поведение автопоезда в смысле устойчивости в определенных ситуациях движения. Из всех показателей оценки устойчивости следует выделить наиболее употребимые.
Критическая скорость криволинейного движения по опрокидыванию характеризует устойчивость авто-поезда опрокидывания под воздействием поперечной составляющей силы инерции и определяется по формуле

При движении с критической скоростью достаточно незначительного бокового возмущения, чтобы автопоезд начал двигаться криволинейно с постепенно уменьшающимся радиусом.