Пример 1.




| s |
| Step |
| Integrator |
| Scope |
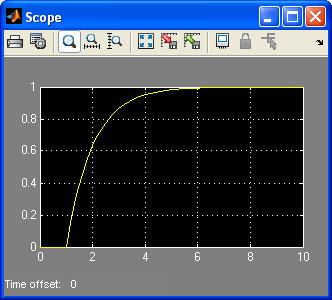
Рис. Модель включает источник ступенчатого воздействия, сумматор, интегратор, охваченный отрицательной обратной связью и осциллограф для наблюдения за реакцией системы.
Построение зависимости выхода от входа стандартного блока библиотеки Simulink.
1. Запустите Matlab
2. Настройте Matlab на свой рабочий каталог, например, tmp_Simulink.
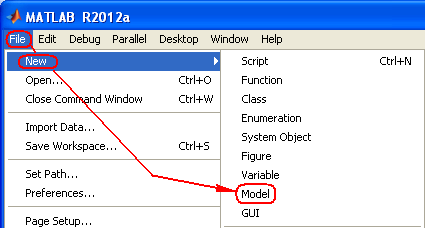
3.Откройте новое окно (файл модели) для построения модели.
4.Командой меню >File>SaveAs переименуйте файл модели untitled, например, в
Example_1 (Title_1).
 >
> 
5..Клавишей  окна модели откройте библиотекуSimulink.
окна модели откройте библиотекуSimulink.
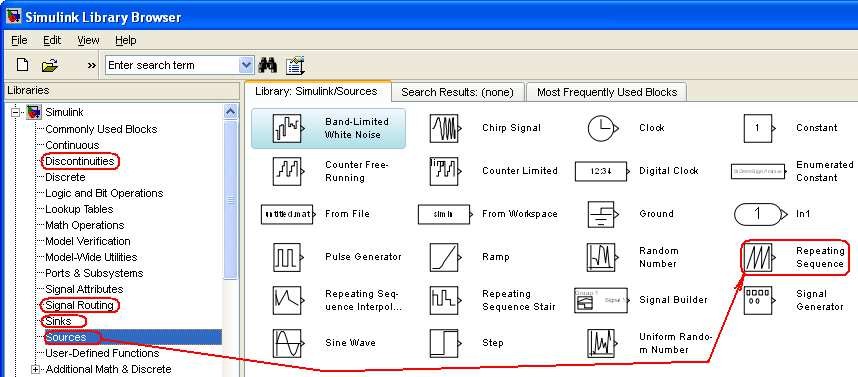
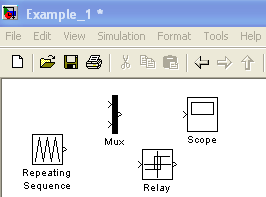
6.Перенесите из библиотеки Simulink в окно модели следующиеблоки.
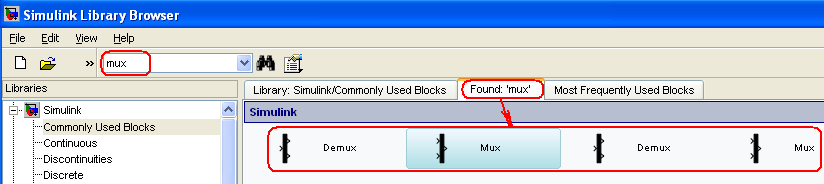
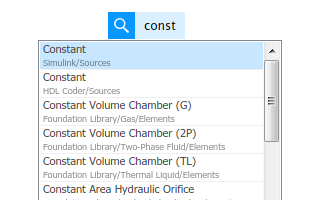
Примечание: нужный блок в библиотеке можно найти, введя имя блока в окне поиска, например,
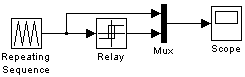
7.Соедините блоки как показано ниже.
8.Откройте блок Scope
9.Запустите модель. Наблюдайте результат моделирования в окне Scope.
 10.Командой блока Scope разместите графики во всей зоне окна.
10.Командой блока Scope разместите графики во всей зоне окна.
11.Командой  блока Scope зафиксируйте размеры окна для будущих графиков.
блока Scope зафиксируйте размеры окна для будущих графиков.
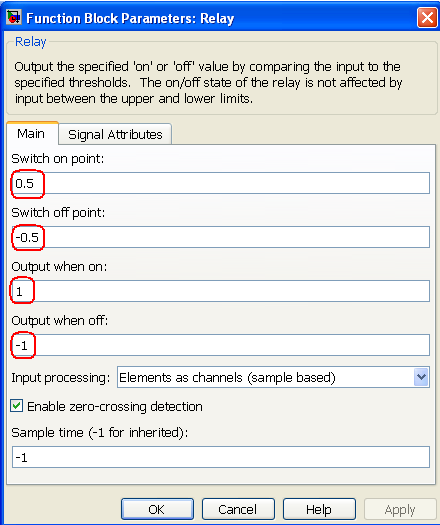
12.Открыв окно с параметрами реле, установите требуемые параметры, например, как показано ниже.
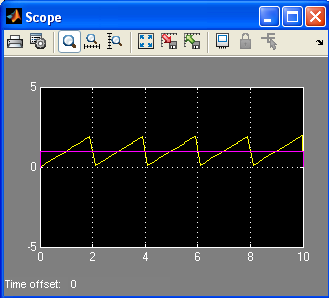
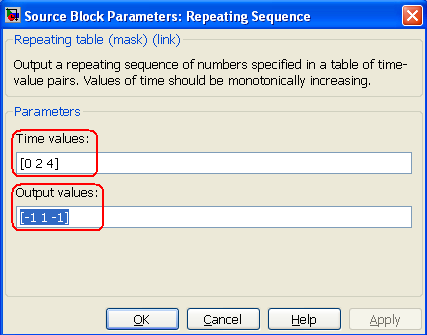
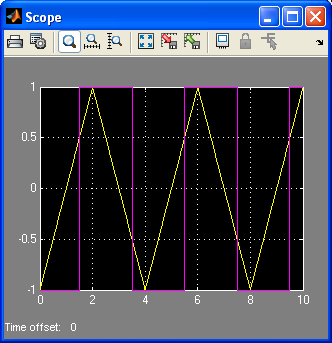
13.Задайте параметры выходного сигнала блока развертки (блок RepeatingSequence) так, чтобы он перекрывал точки переключения реле (-0.5 и0.5). Постройте графики модели (командой).
14.Для уменьшения искажений входного сигнала (пик желтого сигнала отображается полкой) замените (в окне меню модели >Simulation>Configurationparameters>Solver) переменный шаг моделирования “по умолчанию”  на постоянный:
на постоянный:  .
.
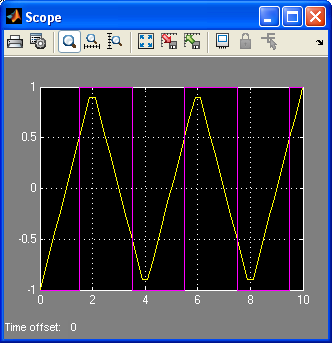
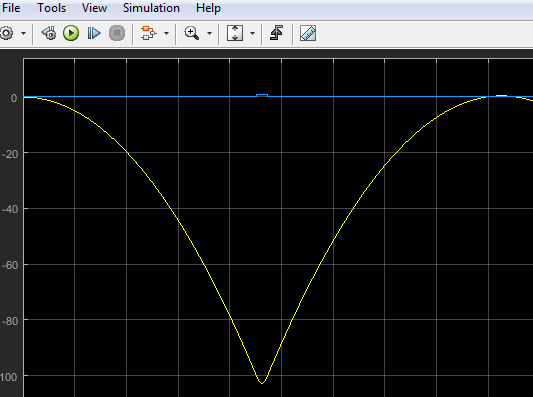
Запустите модель и наблюдайте изменения на графиках сигнала реле.
Графики показывают, что исчезло искажение пика входного сигнала, но теперь сместились точки переключения реле.
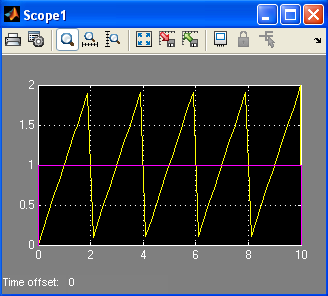
15.Для уменьшения искажений в точках переключения реле замените шаг моделирования
 (в окне меню модели >Simulation>Conf.Parameters>Solver), например, на
(в окне меню модели >Simulation>Conf.Parameters>Solver), например, на 
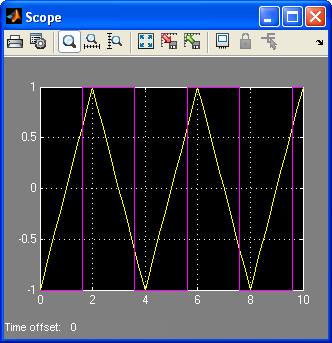
16.Постройте графики реле с новыми значениями параметров моделирования.
Задание 1. Построение модели скачущего мяча.
На заданной высоте, например, 1м, отпускают шар весом 100 г., который летит до поверхности и отскакивает от нее на высоту ~80% от начальной точки. Необходимо построить модель полета и отскоков мяча и определить основные параметры модели.
Составим список отношений, которые, влияют на поведение мяча.
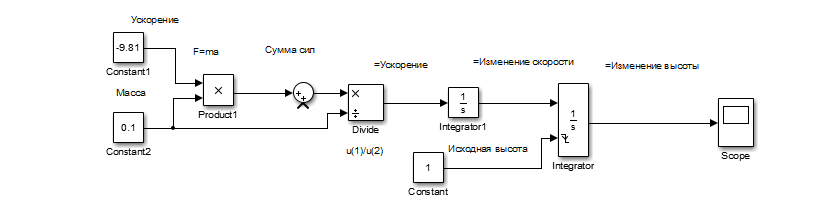
· Сила гравитации равна произведению массы тела на ускорение свободного падения
· Ускорение тела равно отношению сил, действующих на тело, к массе тела
· Изменение скорости равно интегралу от ускорения.
· Изменение расстояния равно интегралу от скорости.
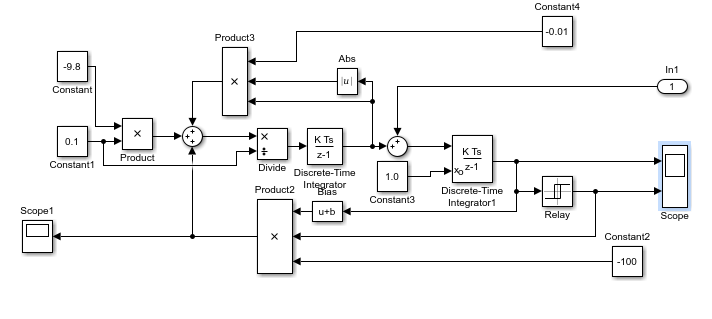
1. В новом окне составьте модель полета мяча, состоящую из блоков, реализующих исходные отношения. Для ускорения моделирования «кликнуть» по полю один или 2 раза (в зависимости от года Matlab), подождать и набирать название блока и, потом, нужную характеристику. Второй вход (постоянная константа) интегратора образуется, если открыть описание блока (двойной клик) и установить в External reset – любой вместо none. Постоянная в интеграторе: Initial conditional sorce – external.
1. Выберите следующие параметры моделирования (меню модели >Simulation>Configuration Parameters (Ctrl+E) >Solver), «колесико»  или Modeling/Settings – в зависимости от версии (года) Matlab:
или Modeling/Settings – в зависимости от версии (года) Matlab:
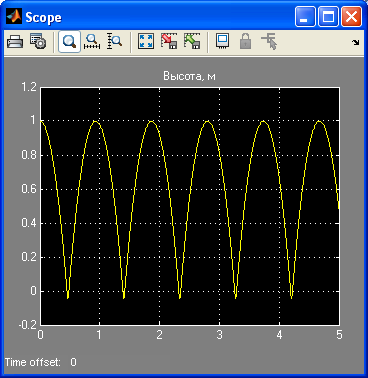
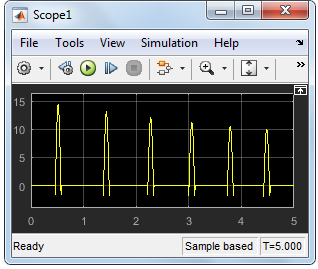
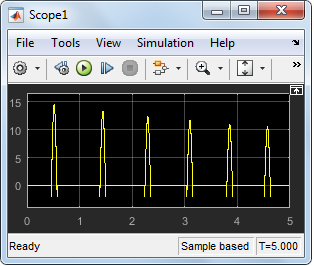
2. 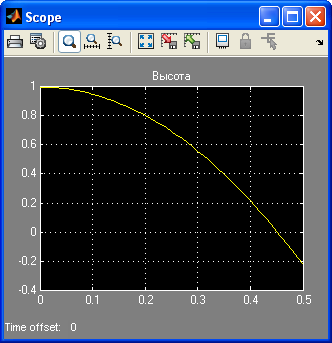 Запустите модель. Постройте график, рассмотрите полет мяча.
Запустите модель. Постройте график, рассмотрите полет мяча.
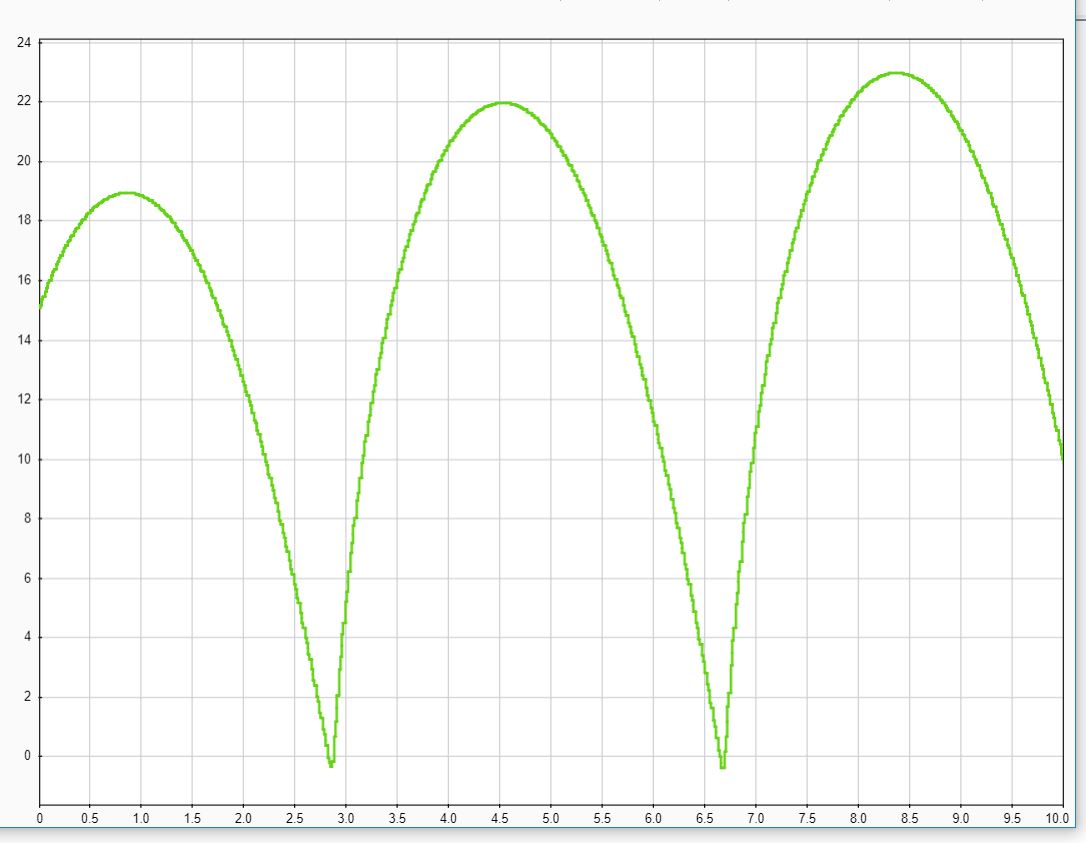
График свободного полета мяча. Полет до поверхности с высоты одного метра под действием гравитации занимает 0.45 секунд. Возможно движение вниз от точки «0» до уровня
-100 за 4,5 ед. времени (Matlab2016>).
Далее необходимо включить в модель описание отскока от земли или от уровня -100.
Добавим в список новое отношение:
Сила сжатия тела равна произведению сжатия тела на коэффициент упругости. Отношение начинает действовать, когда мяч достиг поверхности, при этом высота меняет знак.
*) Согласно закону сохранения энергии, кинетическая энергия мяча равна его потенциальной энергии в начале движения: mv2/2=mgh. Если скорость отскока примем как 80 процентов от скорости непосредственно перед ударом об пол, потенциальная энергия мяча в конце движения равна кинетической энергии после удара: m(0,8v)*2/2=mgh1, откуда получаем 0,64mv*2/2=0,64mgh=mgh1,h1=0,64h - высота подъёма мяча после удара.
4. Дополните модель функциями, описывающими отскок. Если мяч сжимаемый, то при касании появляется сила упругости, которая изменяет ускорение. В простейшем случае Fупр = -kdy, где dy - смещение по y. Эта сила сначала уменьшит скорость по y до 0, потом возвратит к первоначальной величине с обратным знаком. Подберите коэффициент упругости, который соответствует 100% отскоку мяча.
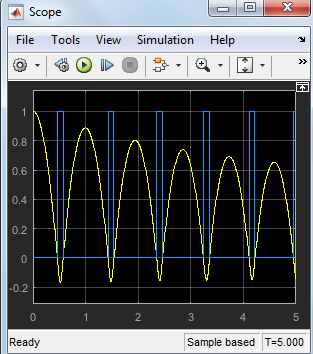
Настройте блок реле (Relay) так, что бы при касании земли блок включался, а при отскоке выключался, предположив, что момент появления силы «отскока» и ее исчезновения не совпадает. Для удобства используйте второй вход Scope, на котором можно увидеть время действия силы отскока. Второй вход Scope образуется: «Колесико» в меню Scope/ Параметры /Количество осей – по требованию.
Дополнительный вход Product – двойной клик/ Number of inputs.
| Relay имеет разрывную передаточную функцию с гистерезисом (или без него), подобную передаточной функции триггера Шмитта. Если сигнал на входе меньше некоторого порога, то на выходе получается сигнал одного уровня (обычно низкого), а если порог превышен, то сигнал на выходе становится другого уровня (обычно высокого). При спаде достигается другой порог и сигнал на выходе также скачком меняется. |
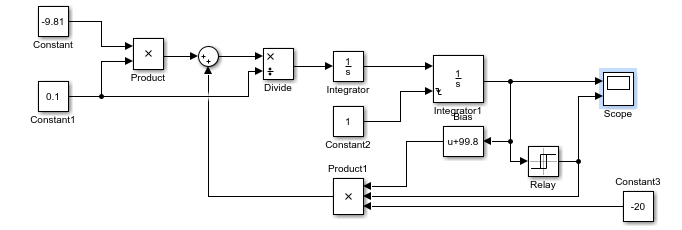
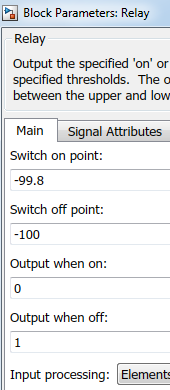
В момент (-99.8) включается реле, которое обеспечивает промежуток работы силы упругости, направленной против движения. Выключается это реле в момент отрыва от поверхности при другом пороге. Блок Bias дополнительно контролирует смещение шара относительно опоры. *) В предложенном примере реализована модель, в которой несжимаемый шар ударяется о сжимаемую (резиновую) поверхность.
Видно, что смоделированный полет не затухает, что не соответствует реальным скачкам мяча. Процесс не теряет энергию. Добавим в список новое отношение:
Сила трения мяча о воздух пропорциональна квадрату скорости мяча.
Сопротивление воздуха F = C x((pV^2)*S)/2, где Cx - коэффициент лобового сопротивления. Для шара примерно 0.5, p - плотность среды. Для воздуха - 1.3кг/m^3. S - площадь сечения шара. pi*r2, V – полная скорость относительно воздуха.
3. Дополните модель блоками описывающими трение мяча о воздух и проверьте работу доработанной модели. Подберите коэффициент лобового сопротивления, при котором мяч взлетает на 80% исходной высоты. Вид сумматора и наличие третьего входа настраивается двойным кликом по нему.
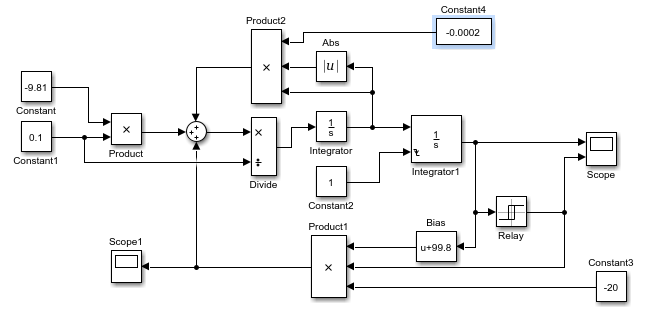
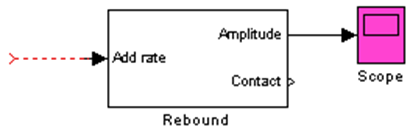
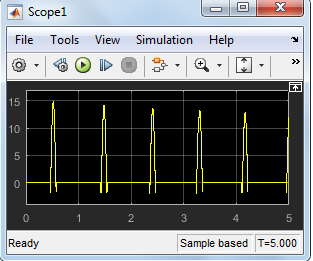
Этот полет мяча примерно соответствует условиям задачи. Справа показана сила (Scope1), определяющая отскок. В дальнейшем параметры модели можно уточнять.

4. Выделите оконтуриванием блоки модели, не включая блоки Scope, постоянные, дополнительный выход и создайте подсистему командой ПКМ CreateSubsystem (Ctrl-G). Должен получиться следующий блок подсистемы (Subsystem) с портом для вывода информации о контакте мяча с поверхностью. Можно проверить работоспособность подсистемы для уверенности в отсутствии ошибок.
Subsystem, по существу, это алгоритм расчета движения прыгающего шарика.
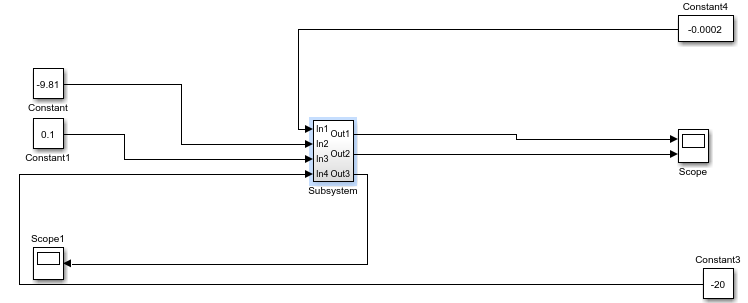
Рис. Блок подсистема - разработанный алгоритм вычисления движения шара.
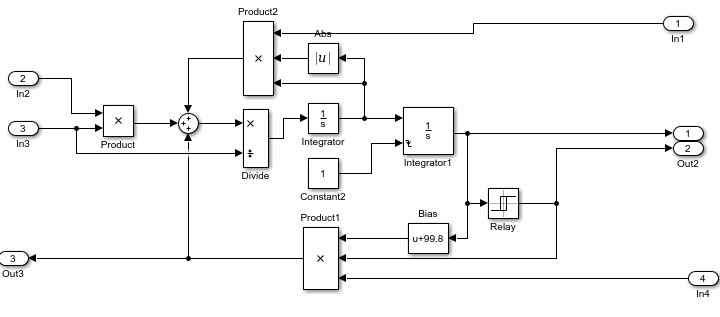 Внутренняя часть подсистемы – строение алгоритма. Можно изменить название подсистемы и портов и цветовую окраску портов.Subsystem -> двойной клик ЛКМ ->Rebound;
Внутренняя часть подсистемы – строение алгоритма. Можно изменить название подсистемы и портов и цветовую окраску портов.Subsystem -> двойной клик ЛКМ ->Rebound;
Цифровая модель устройства. Имитировать падение шарика будем цифровым устройством – процессором или ПЛИС. Для автоматической генерации кода модели и моделирования вычислений на микроконтроллере (МК) необходимо перейти от непрерывной модели к дискретной. Для этого заменим интеграторы на дискретные и подберем такое модельное (sample time) время, при котором выходные графики останутся примерно одинаковыми с аналоговой моделью.
Block Parameters Discrete-Time Integrator: sample time = 0.0001
* Необходимо придерживаться своей модели в плане выбора постоянных величин. Модель в тексте соответствует старому Matlab (2012).
Кликаем на «колесико»  и устанавливаем шаг, одинаковый и интеграторами:
и устанавливаем шаг, одинаковый и интеграторами:
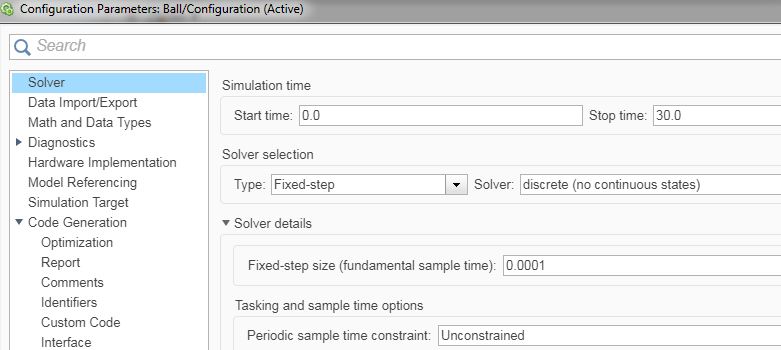

Если на интервале 5 сек шаг составит 1/10000, то результат можно считать приемлемым.
Например, при шаге 1/1000 различие заметно на глаз: за счет потери точности сила отскока увеличилась и затухание стало меньше. Если далее загрублять шаг, то шарик начинает прыгать с нарастанием.
 Отсюда можно предположить, что решатель должен рассчитывать не менее 2000 точек в секунду для поддержания, например, режима реального времени. Естественно, что процессор x64 выполнит это условие с большим запасом, а вот для детской игрушки – Arduino Uno это задание может быть и не выполнимым.
Отсюда можно предположить, что решатель должен рассчитывать не менее 2000 точек в секунду для поддержания, например, режима реального времени. Естественно, что процессор x64 выполнит это условие с большим запасом, а вот для детской игрушки – Arduino Uno это задание может быть и не выполнимым.
*) Высокоуровневая программа на языке С ничего не знает о режиме реального времени, поскольку работает с модельным временем, а конкретный процессор оперирует машинным временем, в котором функционирует аппаратная часть системы моделирования.
Микропроцессорная плата Arduino безусловно просчитает все заданные точки процесса, но может затратить на это и более 5 сек реального времени. Это приемлемо при визуализации процесса, но не позволит управлять детской игрушкой в режиме реального времени. Поэтому, в дальнейшем, после написания или автоматической генерации кода С для платы Arduino, нужно определить, сколько времени тратит процессор для расчета одной точки и принять меры (программные или аппаратные) для уменьшения этого времени.