Расчет системы автоматического регулирования давления на НПС
Устройство управления (положение задвижки), объект регулирования (давление на выходе НПС) – все это включает в себя контур регулирования. Изменение давления контролируется датчиком давления (Метран-150TG), регистрируется, и, преобразуясь в электросигнал, поступает на вход контроллера. Далее контроллер, на основании проведенных расчетов, формирует управляющее воздействие, которое далее при помощи исполнительного механизма меняет положение заслонки.
При наличии всех возможных режимов работы магистрального нефтепровода, контур регулирования должен иметь необходимые показатели качества, оставаться устойчивым в неустановившихся и установившихся режимах, что напрямую зависит от параметров регулятора (ПИ - инструкции контроллера). Расчет проводится, основываясь на свойствах объекта, которые представлю в форме передаточной функции.
Для расчета передаточной функции объекта, используется переходная характеристика объекта, которую называют также кривой отклика. Для этого данные могут быть получены в тот момент, когда происходит изменение режима работы НПС, при условии, что изменение положения регулирующего органа будет иметь ступенчатую форму [11].
На рисунках 4.1 и 4.2 приведены соответственно ступенчатое изменение положения регулирующего органа и изменение во времени выходной характеристики.
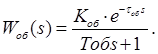
Монотонный характер и запаздывание реакции по отношению к воздействию дает возможность аппроксимировать объект в виде двух элементарных звеньев, соединенных последовательно: апериодического звена первого порядка и запаздывающего звена. Общий вид передаточной функции в этом случае:
 (4.1)
(4.1)
где tоб - время запаздывания объекта;
Коб – коэффициент передачи объекта регулирования;
Тоб – постоянная времени объекта.
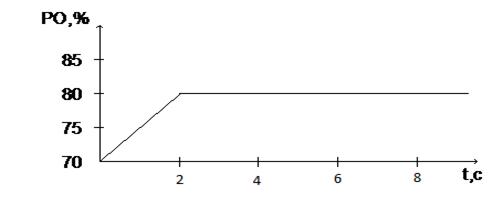
Рисунок 4.1 – График входного ступенчатого воздействия
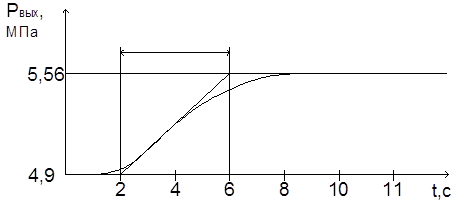
Рисунок 4.2 – График переходной характеристики объекта
Выше названные параметры являются динамическими параметрами объекта регулирования и определяются графически по виду переходной функции (рисунок 4.2).
Постоянная времени объекта Тоб представляет собой временной отрезок от точки пересечения касательной, проведенной к переходной характеристике в точке наибольшего нарастания, с осью абсцисс до точки ее пересечения с линией, установившегося значения параметра. Из графика, приведенного на рисунке 4.2 видно, что Тоб=6 – 2 = 4с.
Время запаздывания tоб определяется как временный отрезок от момента ввода возмущения до пересечения касательной с осью абсцисс, оно равно tоб = 2с.
Относительное изменение положения регулирующего органа:
 , (4.2)
, (4.2)
где Нмах – максимальное значение входного параметра,
Нном – номинальное допустимое значение входного параметра.

Относительное изменение регулируемого параметра объекта:
 , (4.3)
, (4.3)
где Yном- установившееся значение выходной величины до нанесения ступенчатого воздействия;
ΔY – разница между новым установившемся значением и номинальным выходным значением.
 .
.
Коэффициент передачи:
 , (4.4)
, (4.4)
где μ – относительное изменение входного воздействия,
s - относительное изменение регулируемого параметра объекта.
Передаточная функция объекта регулирования имеет вид: