Вместе с подвесными осями, вполне возможно, что подвесные массы валов будут испытывать "извивающие" колебания, возможно влияющими на устойчивость транспорта. Этот эффект не распространяется на плоские модели на рисунке 1,и, следовательно, необходима модель с большим количеством степеней свободы.
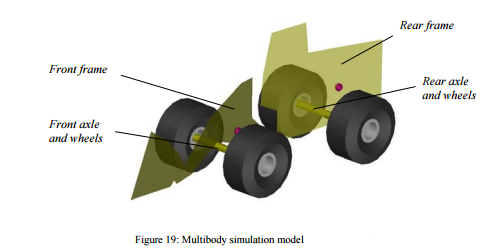
Для имитации подвешенной массы вала, модель использует эквивалентное приближение жесткости вала колесной подвески, используя жесткие оси, поворачивающихся вокруг центра каждой из осей. Таким образом, подвесная масса может свободно вращаться, но не уклоняться и делать скачки, в отличие от ситуации с шинами. Подвесная жесткость вала представлена эквивалентной жесткостью при кручении, действующей вокруг центра валов, расположенных в центре каждой из осей, в то время как гибкость рулевого управления симулируется центром жесткости при кручении, в том же виде как и в плоской модели(рисунок 1). Предполагается, что массы передней и задней частей равны 7.200 кг и 12.000 кг соответственно. Колесная база составляет 3.6 м и ширина колеи 2.4 м.
Анализ извивающей стабильности выполняется путем имитации езды транспорта в прямом направлении на ровной поверхности на постоянной скорости, с одновременным "извилистым" колебанием, вызванным крутящим моментом рулевого управления, приложенного в центре соединения. Базовая подвеска настроена таким образом, что незатухающая частота вращения подвесной массы равна 1.00 Гц, в то время как относительная частота затухания приблизительно равна 0.10. Конфигурация для неподвесной системы также была проанализирована для сравнения. В этой конфигурации передняя ось фиксируется на передней раме, а задняя ось свободно проворачивается вокруг центра крена. Рисунок 4 показывает сравнение между реакциями подвесной и неподвесной моделей после начального поворота руля, в момент времени 6 секунд при скорости 10м/с. Видно, что угол сочленения медленно расходится для подвесного транспортного средства, по сравнению с околонейтральной стабильной неподвесной конфигурации. Кроме того, частота извилистых колебаний слегка снизилась. Кажется, что это служит индикатором того, что извивающие и вращательные движения подвесного транспорта ведут себя в сочетающейся манере так, что савокупные инерции в вертикальной и горизонтальной плоскостях приводят к меньшим частотам в сравнении с вибрациями в горизонтальном направлении неподвесного транспорта.

Дальнейшие исследования извилистых и крутящих движений показывают, что крен кузова и его извилистый характер движения сильно связаны, как видно на рисунке 5. Оба угла описывают гармонические колебания почти в одной и той же частоте, с задержкой угла поворота по времени. Изменение жесткости кручения, в большей степени, не влияет на частоту вращения во время извивающих колебаний. Следовательно, извивающее возбуждение подвесного транспорта может быть охарактеризовано как сочетание движений двух перпендикулярных плоскостей с почти одинаковыми частотами вращения.

Потому как вращательное и извивающее движения тесно связаны, можно ожидать, что стабильная работа системы будет подвержена риску при совпадении собственной частоты вращения с извивающей частотой. Было обнаружено, что фиксируется минимальная устойчивость, когда вращательный резонанс подвесной массы устанавливается на значении схожем с частотой извивания, но этот эффект не столь значим и может быть компенсирован небольшими изменениями других параметров, таких как масса и инерция или жесткость системы рулевого управления.