Идея приближенного метода была изложена И.Г. Бубновым в отзыве на работу С.П. Тимошенко по устойчивости упругих систем в 1913 году и затем, впоследствии был развит Б.Г. Галеркиным. Этот метод решения задач в перемещениях основан на использовании первой вариации энергии, которая равна нулю  . Вариация энергии приводит к уравнению равновесия и статическим граничным условиям. На аппроксимирующие функции прогиба накладывается требование удовлетворения геометрическим граничным условиям. Если выбранные функции удовлетворяют и статическим граничным условиям, то остается удовлетворить полученному уравнению равновесия. Рассмотрим это подробнее. Запишем полную энергию пластины в форме (4.3).
. Вариация энергии приводит к уравнению равновесия и статическим граничным условиям. На аппроксимирующие функции прогиба накладывается требование удовлетворения геометрическим граничным условиям. Если выбранные функции удовлетворяют и статическим граничным условиям, то остается удовлетворить полученному уравнению равновесия. Рассмотрим это подробнее. Запишем полную энергию пластины в форме (4.3).

 .
.
Проварьируем выражение энергии для ортотропной пластины по функции прогиба (В 13 = В 23 = 0) и проинтегрируем по частям производные от вариации функции прогиба. В результате получим под интегралом уравнение равновесия изгиба пластин и статические граничные условия на ее краях 


Последнюю строчку обычно не учитывают.
Если функция  удовлетворяет не только геометрическим граничным условиям, но и статическим условиям на границе пластины, то тогда остается удовлетворить только уравнениям равновесия. Если для шарнирного края выбрана функция прогиба, только удовлетворяющая условию
удовлетворяет не только геометрическим граничным условиям, но и статическим условиям на границе пластины, то тогда остается удовлетворить только уравнениям равновесия. Если для шарнирного края выбрана функция прогиба, только удовлетворяющая условию  , то эта функция не обеспечивает равенство нулю моментов и тогда выражение для соответствующего момента на границе должно остаться в общем решении.
, то эта функция не обеспечивает равенство нулю моментов и тогда выражение для соответствующего момента на границе должно остаться в общем решении.
Рассмотрим более подробно метод на примере одномерной задачи. Пусть решение некоторой задачи связано с минимумом функционала вида
 .
.
Тогда вариация функционала равна нулю и принимает вид

или
 , но т.к.
, но т.к.  , то выражение в квадратных скобках равно нулю.
, то выражение в квадратных скобках равно нулю.
Предположим, что статические граничные условия удовлетворены, тогда предыдущее выражение примет вид
 ,
,
а подынтегральный функционал преобразуется к дифференциальному выражению
 , (4.6)
, (4.6)
где L - дифференциальный оператор. Приближенное решение можно искать в виде ряда
 ,
,
где  - заданные функции,
- заданные функции,  - неизвестные коэффициенты.
- неизвестные коэффициенты.
Тогда вариация функции  запишется в виде
запишется в виде
 , (4.7)
, (4.7)
где  , а выражение (4.6) примет вид с учетом (4.7)
, а выражение (4.6) примет вид с учетом (4.7)
 . (4.8)
. (4.8)
В (4.8) после подстановки ряда с учетом того, что выражение равно нулю, то в нуль должно обращаться каждое слагаемое при независимом коэффициенте  , то есть
, то есть
 , (4.9)
, (4.9)
где индекс  есть номер слагаемого из ряда n.
есть номер слагаемого из ряда n.
То есть выбранный ряд мы должны подставить в подынтегральное выражение, умножить на заданную функцию  и проинтегрировать. Полученную систему алгебраических уравнений решаем относительно искомых коэффициентов . Этот метод решения можно рассматривать как приближенный метод интегрирования дифференциальных уравнений. С другой стороны, с точки зрения математики, условие (4.9) есть процедура ортогонализации выбранной функции между собой, т. e. мы требуем, чтобы ошибка выбранной функции стремилась к нулю. Для упрощения решения желательно, чтобы выбранные перемещения выбирались по ортогональным функциям.
и проинтегрировать. Полученную систему алгебраических уравнений решаем относительно искомых коэффициентов . Этот метод решения можно рассматривать как приближенный метод интегрирования дифференциальных уравнений. С другой стороны, с точки зрения математики, условие (4.9) есть процедура ортогонализации выбранной функции между собой, т. e. мы требуем, чтобы ошибка выбранной функции стремилась к нулю. Для упрощения решения желательно, чтобы выбранные перемещения выбирались по ортогональным функциям.
Рассмотрим пример. Найдем прогиб шарнирно опертой пластины с размерами сторон  , с координатами
, с координатами  , началом координат в угловой точке пластины и нагруженной равномерной нагрузкой
, началом координат в угловой точке пластины и нагруженной равномерной нагрузкой  (рис.4.2). Этому условию закрепления отвечает тригонометрический ряд
(рис.4.2). Этому условию закрепления отвечает тригонометрический ряд
 .
.
На границах пластины сама функция и ее вторая производная, то есть прогиб и моменты, равны нулю. В соответствии с методом Бубнова-Галеркина для изотропной пластины каждое разрешающее алгебраическое уравнение имеет вид
 . (4.10)
. (4.10)
Для симметричного прогиба 
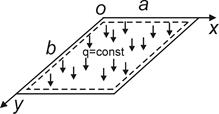
Рис. 4.2. Геометрия, координаты и нагрузка на пластину
Подставляя тригонометрический ряд в (4.10), получаем выражение
 .
.
Откуда после интегрирования с учетом ортогональности заданных функций находим коэффициенты 
 .
.
В случае, когда поверхностная нагрузка постоянна, то коэффициент равен 
и функция прогиба имеет вид
 (
( ).
).
Как видно из приведенного вычисления для квадратной пластины этот ряд быстро сходится
 .
.