3.1.1 Передаточная функция и параметры измерительного устройства
Структурная схема измерительного устройства представлена на рис.3.1.

Рисунок 3.1 – Структурная схема измерительного устройства
Если пренебречь индуктивностью и активным сопротивлением обмоток сельсинной пары, то измерительное устройство можно считать безинерционным (пропорциональным звеном). Оно состоит из элемента сравнения, который осуществляет вычитание  [в изображениях по Лапласу
[в изображениях по Лапласу  ], а также из преобразователя рассогласования
], а также из преобразователя рассогласования  в напряжение
в напряжение  , который можно представить функцией:
, который можно представить функцией:

3.1.2 Передаточная функция и параметры фазового детектора
В соответствии с функциональной схемой рис.1.1, структурная схема фазового детектора представлена на рис.3.2.

Рисунок 3.2 – Структурная схема фазового детектора
Пренебрегая индуктивностями и активными сопротивлениями в трансформаторе, а также при условии, что не предусмотрен сглаживающий фильтр, фазовый детектор можно считать безинерционным звеном с передаточной функцией:
 2,5
2,5
3.1.3 Передаточная функция и параметры усилителя напряжения
В соответствии с функциональной схемой рис.1.1, структурная схема усилителя напряжения представлена на рис.3.3.

Рисунок 3.3 - Структурная схема усилителя напряжения
Если пренебречь инерционностью транзисторов, то усилитель напряжения можно считать безинерционным (пропорциональным) звеном с передаточной функцией:
 6,9
6,9
3.1.4 Передаточная функция и параметры электромашинного усилителя мощности
В соответствии с функциональной схемой рис.1.1, структурная схема ЭМУ представлена на рис.3.4.

Рисунок 3.4 - Структурная схема ЭМУ
Передаточная функция ЭМУ с поперечным полем имеет вид:

где  - статический коэффициент усиления ЭМУ по напряжению;
- статический коэффициент усиления ЭМУ по напряжению;
 - постоянная времени цепи управления;
- постоянная времени цепи управления;
 - постоянная времени короткозамкнутой цепи.
- постоянная времени короткозамкнутой цепи.
По данным таблицы 2.2 найдем постоянные времени:

Коэффициент передачи в режиме холостого хода приближенно можно найти по номинальным данным:

Полученная передаточная функция:

3.1.5 Передаточная функция и параметры исполнительного двигателя
Структурная схема исполнительного двигателя представлена на рис.3.5.
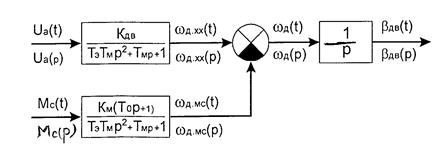
Рисунок 3.5 - Структурная схема исполнительного двигателя
Т.к. выходной величиной двигателя является угол поворота β, то передаточная функция двигателя по управлению имеет вид:

где  - статический коэффициент преобразования двигателя по скорости;
- статический коэффициент преобразования двигателя по скорости;
 - электромагнитная и электромеханическая постоянные времени двигателя.
- электромагнитная и электромеханическая постоянные времени двигателя.
 .
.
Постоянные времени, вычисляются по формулам:
где J – момент инерции.
Найдем момент инерции J на валу электродвигателя из выражения:

Индуктивность обмотки якоря приближенно вычисляется по формуле:

где β=0,25 принимается для компенсированных машин, а β=0,6 – для ЭМУ;
р – число пар полюсов.

Электромагнитная постоянная времени:
Передаточная функция исполнительного двигателя по управляющему воздействию:

Передаточная функция исполнительного двигателя по возмущающему воздействию:

Т.к., в знаменателе передаточных функций исполнительного двигателя имеется полином второго порядка, то определим его корни с целью разложения данного полинома на более простые сомножители:



 ,
,  =0
=0



где 
Соответственно, передаточная функция двигателя по управляющему воздействию  имеет вид:
имеет вид:

Передаточная функция по возмущающему воздействию имеет вид:

3.1.6 Передаточная функция и параметры редуктора
Структурная схема редуктора представлена на рис. З.6.
Рисунок З.6 – Структурная схема редуктора
Пусть момент инерции первой шестерни редуктора учтён в моменте инерции якоря двигателя, т.к. момент инерции последующих шестерен уменьшается пропорционально квадрату передаточного числа и ими можно пренебречь, то редуктор можно считать безинерционным
(пропорциональным) звеном с передаточной функцией:

3 .2 Передаточные функции системы
В соответствии с функциональной схемой рис. 1.1, структурная схема следящей системы представлена на рисунке 3.7., где в прямоугольные звенья записаны математические модели этих звеньев.

Рисунок 3.7 - Структурная схема некорректированной следящей системы
3.2.1 Передаточная функция разомкнутой системы устанавливает связь между  и
и  :
:


Таким образом, передаточная функция разомкнутой системы будет выглядеть следующим образом:

3.2.2 Передаточная функция замкнутой системы по задающему воздействию:

 ,
,
где 
С помощью ЭВМ (программы ТАУ 1) были вычислены коэффициенты:

Полученная передаточная функция замкнутой системы по задающему воздействию примет вид:

3.2.3 Передаточная функция системы по возмущающему воздействию
Устанавливает связь между и  :
:

3.2.4. Передаточная функция ошибки по задающему воздействию
Устанавливает связь между  и
и  :
:

3.2.5. Передаточная функция ошибки по возмущающему воздействию

