Построение Lпс(ω) осуществляется в соответствии с выражением:
Lпс(ω)=Lж(ω) - Lн(ω).
Необходимые построения выполнены на рисунке 3.8. По виду Lпс(ω) определяем вид принципиальной схемы, передаточной функции и параметры последовательного корректирующего устройства.
Принципиальная схема имеет следующий вид:
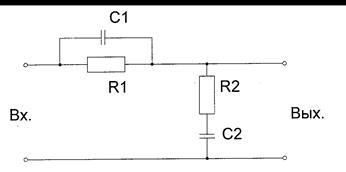
Рисунок 4.4 – Принципиальная схема последовательного корректирующего звена
Передаточная функция в соответствии со схемой и Lпс(ω) имеет следующий вид:
где 
Запишем необходимые соотношения:

Тогда: 
Для начала определим α: 

Зададимся  мкФ:
мкФ:
 ;
;


Определение передаточной функции, принципиальной схемы и параметров параллельного корректирующего устройства
Передаточную функцию параллельного корректирующего устройства  получим через передаточную функцию последовательного корректирующего устройства
получим через передаточную функцию последовательного корректирующего устройства  и передаточную функцию звеньев, охваченных обратной связью
и передаточную функцию звеньев, охваченных обратной связью  .
.
Охватим отрицательной связью наиболее инерционные звенья, т.е. исполнительный двигатель, электромашинный усилитель, усилитель напряжения.
Если выразить:

То, подставив это в основное выражение, получим;

Согласно формуле:






Для преобразования угловой частоты  применяем тахогенератор, который выбираем из следующих условий:
применяем тахогенератор, который выбираем из следующих условий:
1) его  должна быть приблизительно равной
должна быть приблизительно равной  ;
;
2) момент сопротивления  должен много меньше момента сопротивления двигателя;
должен много меньше момента сопротивления двигателя;
3) момент инерции тахогенератора  должен быть много меньше момента инерции якоря двигателя
должен быть много меньше момента инерции якоря двигателя  .
.
С учетом указанных условий выбираем тахогенератор ТГ-2, параметры которого указаны в таблице4.1.
Таблица 4.1 – Характеристики тахогенератора
| Удельная ЭДС в/об/сек | Iн max, А | nmax, об/мин | Jя, кГ*м*с2 | Маховой момент, кГ*м*с2 |
| 1,27 | 0,02 | 
| 
|

Рисунок 4.5 – Принципиальная схема преобразователя угловой частоты

Найдем передаточные функции звеньев корректирующего устройства:
Следовательно,  соответствует звену с передаточной характеристикой
соответствует звену с передаточной характеристикой  из формулы, а
из формулы, а  .
.
Третье звено не будет реализовано, т.к. оно соответствует области малых параметров, которыми можно пренебречь.

Согласно вышеуказанным формулам найдем номиналы элементов корректирующего устройства (применим значения конденсаторов  и
и  , равными 1 мкФ, а
, равными 1 мкФ, а  равным 10 мкФ):
равным 10 мкФ):


Определим необходимые коэффициенты усиления  и
и  :
:

может принимать значения от 0,6 до 10 и вычисляется:

5 АНАЛИЗ ДИНАМИКИ СКОРРЕКТИРОВАННОЙ СИСТЕМЫ
Определение устойчивости замкнутой скорректированной системы по корням характеристического уравнения с помощью ЭВМ
Передаточная функция скорректированной системы соответствует желаемой ЛАЧХ и имеет вид:



Используя программный пакет ТАУ-1, получим следующие корни данного уравнения, которые сведем в таблицу 5.1.
Таблица 5.1.- Корни характеристического уравнения Сж(р)=0
| корни | Re pi | Im pi |
| р1 | -0,2285 | |
| р2 | -2,1386 | 5,6111 |
| р3 | -2,1386 | -5,6111 |
| р4 | -23,9195 | 12,0394 |
| р5 | -23,9195 | -12,0394 |
| р6 | -38,2169 |
Как видно из таблицы, вещественные части всех корней отрицательны.