В данной курсовой работе осуществляется анализ следящих систем и синтез корректирующего устройства и параллельно встречного корректирующего звена.
Следящая система является устройством автоматического управления, предназначенным для воспроизведения параметра регулирования, изменяющегося по заранее неизвестному закону. Воспроизведение параметра регулирования может осуществляться различными способами с разной степенью точности.
Следящая система автоматически воспроизводит заданное перемещение или заданный параметр, как правило, без механической связи между задающим и исполнительным элементами.
Следящая система является замкнутой системой автоматического управления.
Следящая система строится на принципе усиления управляющего сигнала по мощности, что связывает её с усилителем ОС и системами автоматического регулирования.
Основным требованием, предъявляемым к следящим системам, является минимум погрешности E(t), определяемой как разность между заранее неизвестным законом x(t) и управляемой величиной y(t).Обычно следящая система представляет собой замкнутую систему управления по отклонению.
1 Техническое задание
Функциональная схема следящей системы постоянного тока
Функциональная схема следящей системы постоянного тока представлена на рисунке 1.1 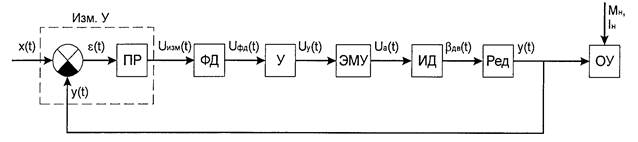
Рисунок 1.1 - Схема функциональная следящей системы постоянного тока.
На рисунке 1.1 изображены:
Изм. У – измерительное устройство (сельсинная пара, работающая в трансформаторном режиме);
ПР – преобразователь рассогласования ε(t) в Uизм. (t) на выходе;
ФД – фазочувствительный детектор;
У – усилитель по мощности и напряжению;
ЭМУ - электромашинный усилитель;
ИД – исполнительный двигатель постоянного тока;
Ред. – редуктор;
ОУ – объект управления;
Мн – момент сопротивления нагрузки (ОУ);
Iн – момент инерции нагрузки (ОУ);
x(t) – задающее воздействие (сигнал);
y(t) – управляемый сигнал (выходной сигнал);
ε(t) – величина рассогласования (ошибки) следящей системы;
Uизм. (t) – напряжение на выходе измерительного устройства;
Uфд.(t) – выходное напряжение фазового детектора;
Uу(t) – выходное напряжение усилителя;
βдв(t) – угол поворота якоря исполнительного двигателя.
Требования к качеству системы
Требования к качеству системы представлены в таблице 1.1.
Таблица 1.1 - Требования к качеству системы
| Перерегулирование s,% | Время регулирования tрег,сек | Допустимая статическая ошибка Ест,рад | Допустимая кинетическая ошибка Екин,рад |
| 2,1 | 0,015 | 0,03 |
Исходные данные для проектирования
Исходные данные для проектирования представлены в таблице 1.2.
Таблица 1.2 - Исходные данные
| Мн, Нм | Jн, Нмс2 | wн,1/с | ан,1/с2 |
| 1,2 | 0,6 |
Измерительное устройство – сельсинная пара с частотой питания
50 Гц. Рабочая температура ИД 75°С.
МЕТОДИКА И РАСЧЕТ
2 Выбор элементов основного контура
Выбор исполнительного двигателя.
Выбор осуществляется по величине требуемой мощности двигателя, которая определяется по формуле:

где (1,25  2,5) – коэффициент, учитывающий мощность, затраченную двигателем на себя;
2,5) – коэффициент, учитывающий мощность, затраченную двигателем на себя;
Мн – момент сопротивления вала системы нагрузки, Н×м;
Jн – момент инерции вала системы нагрузки, Н×м×с2;
ан – максимальное ускорение вращения вала системы нагрузки, рад/с2;
wн – максимальная угловая частота вращения вала системы нагрузки, рад/с.


Из полученного диапазона мощностей по справочным данным 1.3 выбираем двигатель постоянного тока МИ–32, технические характеристики которого приводим в таблице 2.1.
Таблица 2.1 - Технические данные двигателя МИ – 32
| Uном, В | 
| 
| Iяном, А | h, % | 
| 
| 
| 
|
| 8,2 | 0,585 | 
| 
| 
|
Так как рабочая температура двигателя - 750С, то пересчитаем  , с учетом данного условия:
, с учетом данного условия:
 ,
,
где  и
и  - сопротивления якоря двигателя при температурах 75°С и 20°С, Ом.
- сопротивления якоря двигателя при температурах 75°С и 20°С, Ом.
