8.1 Датчики систем автоматики
Общие сведения. Датчиком в системе автоматического контроля и регулирования называют специальное устройство, служащее для преобразования контролируемой или регулируемой величины в выходной сигнал.
Датчик состоит из одного или нескольких элементов (преобразователей). Главным элементом датчика является первичный преобразователь, воспринимающий контролируемую величину и называемый чувствительным элементом. Чувствительные элементы по физическому принципу могут быть электрические, механические, акустические, оптические, тепловые, гидравлические, радиоактивные, электромагнитные и т. п.
Наибольшее распространение в системах автоматики, применяемых в транспортном строительстве, получили датчики, преобразующие неэлектрические величины в электрические, так как выходной сигнал (ток, напряжение) может записываться, передаваться на расстояние и тем самым дистанционно управлять производственным процессом.
Основными характеристиками датчика являются статическая характеристика и чувствительность.
Статическая характеристика датчика отображает функциональную зависимость выходной величины y от входной величины х, т. е.
 ,
,
где y – величина, полученная после преобразования (выходная); х – контролируемая (входная) величина, действующая на датчик.
При плавном изменении выходной величины статическая характеристика датчика представляет собой плавную кривую. При скачкообразном изменении выходной величины статическая характеристика имеет разрывной характер. Такие датчики называют датчиками с релейной характеристикой. По статической характеристике датчика определяют его чувствительность.
Чувствительность датчика показывает степень изменения выходной величины в зависимости от изменения входной:
 .
.
Так, например, чувствительность термопары показывает степень изменения развиваемой ею термоэлектродвижущей силы при изменении температуры. Наименьшее изменение входной величины, вызывающее заметное изменение выходного сигнала, называют порогом чувствительности датчика.
По выходной величине все электрические датчики разделяются на параметрические и генераторные.
Параметрическим датчиком называют датчик, которых для совей работы требует дополнительного источника питания. Примером такого датчика может служить термометр сопротивления, у которого контролируемая величина – температура – преобразуется в изменение электрического активного сопротивления, а значит, и тока за счет источника питания, включенного в диагональ моста, т. е. к зажимам термометра.
Генераторным датчиком называют датчик, который для своей работы не требует дополнительного источника питания. Примером генераторных датчиков являются: термопара, в которой за счет энергии входной величины (температуры) возникает электродвижущая сила (выходная величина); тахогенератор; пьезодатчики и др.
Датчики выполняют контактными и бесконтактными. Чувствительный элемент в контактных датчиках непосредственно соприкасается с контролируемым объектом, а в бесконтактных не соприкасается. К бесконтактным относятся радиоактивные, ультразвуковые фотоэлектрические и электромагнитные датчики.
При автоматизации существующих и разрабатываемых вновь производственных и строительных процессов в транспортном строительстве, а также при автоматизации строительных и дорожных машин приходится измерять, контролировать и регулировать разнообразные параметры технологических операций, как например, скорости, углы наклона, перемещения, крутящие моменты, уровни, механические напряжения, температуры и т. д., для чего применяют различные датчики.
Датчики перемещения. Потенциометрические (реостатные) датчики применяются для преобразования угловых и линейных перемещений в электрический сигнал. Датчики такого типа (рис. 8.1) представляют собой переменное электрическое сопротивление RП, к концам которого прикладывается напряжение питания U0.
Рис. 8.1. Схема включения потенциометрического датчика
Выходное напряжение U1 снимается при помощи подвижного контакта (движка) с переменного сопротивления (потенциометра) RП. При линейном или угловом перемещении детали, положение которой контролируется датчиком, контакт (движок) скользит по намотке. Потенциометры работают в схемах с источниками постоянного и переменного тока и широко используются в следящих системах в качестве измерительных элементов. Реостатные датчики выпускаются с проволокой, намотанной на корпус, или реохордного типа. В устройствах автоматики чаще применяется включение их по схеме делителя напряжения.
Тензометрические (проволочные) датчики применяют для преобразования механических напряжений, усилий и деформаций в различных механизмах и конструкциях в электрический сигнал. Наиболее распространены тензодатчики, у которых при внешнем воздействии изменяется активное сопротивление чувствительного элемента. Такие датчики называют тензорезисторами. Наиболее распространенный проволочный датчик (рис. 8.2) состоит из проволоки диаметром от 15 до 60 мк, уложенной зигзагообразно и обклеенной с двух сторон тонкой бумагой. К концам проволоки присоединены выводные проводники для включения датчика в измерительную сеть.
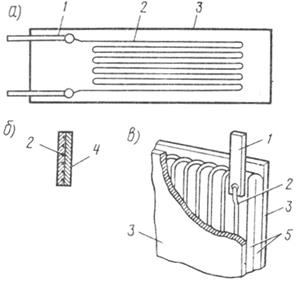
Рис. 8.2. Проволочный тензодатчик:
а – вид при снятом покрытии; б – поперечное сечение; в – конструкция; 1 – выводные провода; 2 – проволока; 3 – подкладка из бумаги или лаковой пленки; 4 – покрытие из бумаги, фетра или лака; 5 – бумажный каркас
Датчики приклеивают к испытуемой детали так, чтобы проволоки воспринимали ее деформации (сжатие или растяжение). В результате изменяется сопротивление проволоки. Тензометрический датчик преобразует весьма малые перемещения (деформации) в электрическое сопротивление. Сопротивление проволоки R зависит от ее длины l, м, и сечения S, м2, т. е.
 ,
,
где ρ – удельное сопротивление проводника, Ом·м.
Изменение длины проволоки Δl, вызванное усилием деформации F, можно определить по формуле:
 ,
,
где Е – модуль упругости металла проволоки.
Тензорезисторы используются и как датчики усилия и веса (в дозаторах и весовых устройствах).
Индуктивные датчики применяются для преобразования в электрический сигнал небольших линейных и угловых перемещений. Принцип действия их основан на изменении индуктивности катушки с магнитопроводом при перемещении якоря. Индуктивные датчики имеют различную конструкцию. На рис. 8.3, а показан индуктивный датчик с воздушным зазором δ, который изменяется при воздействии на якорь измеряемой механической величины P (силы). С изменением зазора изменяется магнитное сопротивление сердечника, а следовательно, и индуктивность катушек. Катушки расположены на сердечнике и включены в цепь переменного тока. Изменение индуктивности катушки вызывает соответствующее изменение тока.

Рис. 8.3. Схема индуктивных датчиков
У индуктивного датчика дифференциального типа (рис. 8.3, б) сердечник расположен между двумя симметричными индукционными катушками. При одинаковых воздушных зазорах δ1 и δ2 индуктивные сопротивления обмоток L1 и L2 равны, и в измерительном приборе ток не возникает. При перемещении сердечника индуктивные сопротивления катушек становятся различными, что вызывает отклонение стрелки прибора.
Подвижной сердечник индуктивного датчика плунжерного типа (рис. 8.3, в) воспринимает перемещение от контролируемого объекта, для чего он помещен внутрь симметрично расположенных катушек, включенных в мостовую схему. При перемещении сердечника равновесие измерительного моста нарушается, а в его диагонали появляется ток, зависящий от величины перемещения сердечника относительно нейтрального положения.
Индуктивный поворотный трансформаторный датчик (рис. 8.3, г) имеет две обмотки. Первичная обмотка W1 питается от источника переменного тока. Вторичная обмотка W2 поворачивается на некоторый угол α при угловом перемещении контролируемой детали. При повороте обмотки W2 изменяется взаимоиндукция обмоток и, следовательно, величина вторичной э. д. с. (Uвых).
Преимуществом индуктивных датчиков являются простота и надежность устройства, отсутствие подвижных контактов, возможность использования переменного тока промышленной частоты и возможность непосредственного включения измерительного прибора. Данные обстоятельства способствуют широкому их распространению в промышленности.
Емкостные датчики преобразуют механические перемещения в измерения электрической емкости, т. е. изменяют емкостное сопротивление:
 ,
,
где f – частота источника питания; С – емкость.
Емкостные датчики, как и индуктивные, работают на переменном токе, только в отличие от индуктивных в большинстве случаев они работают на частоте выше 1 кГц.
Значение емкости  можно регулировать изменением зазора δ, площади S и выбором материала диэлектрика (диэлектрической постоянной е). Емкостные датчики могут иметь различную конструкцию. В одних датчиках пластины конденсатора сдвигаются и раздвигаются (рис. 8.4, а), в других они выполнены в виде пластин и взаимно поворачиваются (рис. 8.4, б); у других цилиндры смещаются один параллельно другому (рис. 8.4, в) или между двумя неподвижными пластинами конденсатора перемещается третья (рис. 8.4, г).
можно регулировать изменением зазора δ, площади S и выбором материала диэлектрика (диэлектрической постоянной е). Емкостные датчики могут иметь различную конструкцию. В одних датчиках пластины конденсатора сдвигаются и раздвигаются (рис. 8.4, а), в других они выполнены в виде пластин и взаимно поворачиваются (рис. 8.4, б); у других цилиндры смещаются один параллельно другому (рис. 8.4, в) или между двумя неподвижными пластинами конденсатора перемещается третья (рис. 8.4, г).
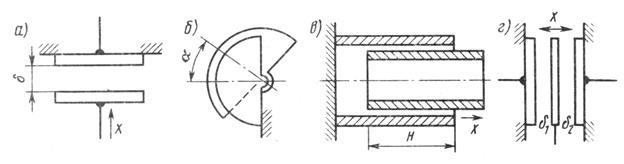
Рис. 8.4. Схемы емкостных датчиков
Последняя конструкция представляет собой дифференциальный емкостный датчик. При перемещении средней пластины емкость конденсатора изменяется. Емкостные датчики обладают высокой чувствительностью, а отсутствие электрических контактов обеспечивает их надежную работу. Однако эти датчики в автоматике получили небольшое распространение, так как имеют серьезные недостатки. В частности, они непригодны для работы на низких частотах и требуют специального высокочастотного генератора. Схемы с емкостными датчиками сложны в регулировке и неудобны в эксплуатации, так как они чувствительны к посторонним электрическим полям и паразитным емкостям.
Электроконтактные (электромеханические) датчики предназначены для управления электроприводами механизмов и машин, а также для ограничения перемещения (в частности, аварийного) различных частей механизмов. К датчикам такого рода относятся путевые (конечные) выключатели, которые приводятся в действие движущимися элементами машин и механизмов.
Путевые выключатели оснащены различными наборами групп подвижных контактов. По характеру действия механизма на подвижные контакты различают выключатели простого и мгновенного действия, а по виду возвратной характеристики – выключатели с самовозвратом и без самовозврата. Наибольшее распространение в системах автоматики строительных машин и механизмов получили путевые выключатели серии ВК и микропереключатели.
К электроконтактным датчикам можно отнести различные модификации ртутных переключателей поворотного типа. Они представляют собой частично заполненный ртутью стеклянный сосуд с впаянными электрическими контактами. В определенных положениях контакты соединяются через ртуть и замыкают электрическую цепь. При повороте стеклянного сосуда в другое положение ртуть переливается и контакты размыкаются. Получаемые при этом электрические сигналы могут быть использованы для управления исполнительными механизмами.
Следует отметить, что в настоящее время ртутные выключатели находят все меньшее применение, так как в условиях вибрации дают ложные срабатывания.
Бесконтактные датчики и концевые выключатели получили большое распространение в системах автоматизации строительных машин и механизмов. Эти приборы состоят из следующих функциональных элементов: металлической пластины (или детали механизма) – воздействующего (контролирующего) элемента, преобразователя (генератора) перемещений контролируемого элемента в электрический сигнал и электрической схемы релейного действия для получения выходного сигнала дискретной формы.
Рассмотрим работу указанных элементов на примере схемы датчика типа БК-А-5-0 (рис. 8.5). Преобразователь представляет собой схему генератора, выполненного на транзисторе VT1. Катушки обратной связи его L1 и L2 образуют чувствительный элемент, взаимодействующий с перемещаемой металлической деталью контролируемого механизма или с закрепленной на ней металлической пластиной – экраном. Если экран отсутствует, то генератор возбуждается, его колебания с обмотки L3 выпрямляются диодом VD1 и сглаживаются конденсатором С4. Образованный сигнал постоянного тока усиливается двухкаскадным усилителем с релейной характеристикой на транзисторах VT2 и VT3, причем транзистор VT2 открыт, а транзистор VT3 закрыт. Нагрузкой, включаемой между шиной на 12 или 24 В и коллектором транзистора VT3, может быть обмотка реле, логический элемент и т. д. В случае нахождения между катушками металлического экрана колебания генератора прекращаются, транзистор VT2 закрывается, а VT3 открывается, обеспечивая появление напряжения на нагрузке.
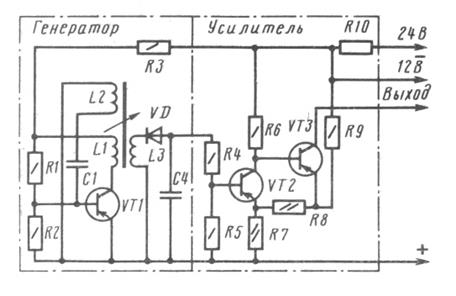
Рис. 8.5. Принципиальная схема бесконтактных датчиков и выключателей
Все разновидности выпускаемых бесконтактных датчиков и выключателей могут быть сведены к двум типам. Датчик со щелевым чувствительным элементом (рис. 8.6) отличается большой точностью и быстродействием, однако сравнительно сложен. Датчик с плокостным чувствительным элементом (рис. 4.12) более прост по конструкции и удобен в эксплуатации, но имеет несколько худшие показатели по точности и быстродействию.
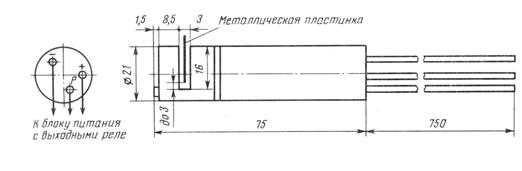
Рис. 8.6. Габаритные размеры и схема внешних соединений датчиков типов БК и БК-А
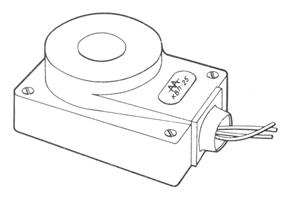
Рис. 8.7. Путевой выключатель КВП-8 с плоским чувствительным элементом
В датчиках первого типа металлический экран проходит в щели между катушками чувствительного элемента, в датчиках второго типа экран установлен около катушек с определенным зазором.
По назначению датчики и выключатели по классификации НПО «ВНИИстройдормаш» можно разделить на три основные группы:
датчики, встраиваемые в измерительные приборы, например весовые головки (датчики БК, БК-А, БК-5-0), указатели уровня сыпучих материалов, сигнализаторы наличия материалов на ленте транспортера, щуповые датчики систем, автоматика автогрейдеров и асфальтоукладчиков (типа БК-А), бесконтактные манометры (датчики типа БК-0) и др.;
выключатели, устанавливаемые на исполнительных механизмах машин и оборудования, например затворах дозаторов бетоносмесителей (выключатели типов КВД-3 и КВД-6), для контроля положения камерных насосов пневмотранспорта цемента и положения передней заслонки и задней стенки ковша скрепера (выключатели типов КВП-8 и КВП-16) и др.;
выключатели для контроля положения транспортных средств, например, на передвижных складах цемента, на мачтовых подъемниках (выключатели типа КВД-100) и др.
Бесконтактные датчики и конечные выключатели обеспечивают высокую надежность и долговечность автоматизированных систем управления строительно-дорожными машинами и оборудованием на предприятиях строительной индустрии.
Датчики скорости. Одним из наиболее распространенных датчиков скорости является тахогенератор, который представляет собой электромеханическое устройство, преобразующее механическое вращение в электрический сигнал. Тахогенераторы используются как электрические датчики угловой скорости и работают как обычные маломощные электрические машины в режиме генератора для выработки напряжения, пропорционального частоте вращения. В зависимости от конструкции и соответственно выходного напряжения тахогенераторы подразделяются тахогенераторы постоянного и переменного тока с независимым возбуждением. Вал тахогенератора соединяется с валом, частоту вращения которого необходимо замерить или контролировать. Выходное напряжение, снимаемое с его щелок, пропорционально частоте вращения вала. При изменении направления вращения меняется полярность напряжения.
Тахогенераторы широко применяют в схемах автоматического управления электроприводами конвейеров, дозаторов непрерывного действия и при выполнении различных измерений.
Датчики усилий. Преобразование измеряемых усилий в электрическое напряжение производится датчиками усилий, которые подразделяются на магнитоупругие, пьезоэлектрические, емкостные, индуктивные, тензометрические и др.
Температурные датчики. Способность тел изменять физические свойства при воздействии на них температуры положена в основу конструкции температурных преобразователей. При изготовлении температурных датчиков используют такие физические явления, как тепловое расширение тел (биметаллы), появление термоэлектродвижущей силы (термопары), изменение электропроводимости проводников и давление газов при нагреве.
В электрических термометрах сопротивления использовано свойство чистых металлов и полупроводниковых материалов изменять омическое сопротивление в зависимости от температуры.
Термопара представляет собой спай двух разнородных проводников. Принцип действия термопары основан на свойстве некоторых металлов и сплавов создавать э.д.с. при нагревании места их соединения (спая); по величине э.д.с. можно судить о температуре нагрева спая.
В манометрических термометрах использовано свойство заключенных в закрытый сосуд газов, которые при изменении температуры изменяют давление на его стенки.
Фотоэлектрические датчики. Датчики этого вида преобразуют световую энергию в электрическую. Они выпускаются трех типов: с внутренним, внешним и вентильным фотоэффектом. Если под действием света освободившиеся электроны остаются в веществе (металле, полупроводнике), повышая его электропроводность, то фотоэффект называют внутренним. К датчикам с внутренним фотоэффектом относятся фотосопротивления.
Датчики с внешним фотоэффектом, называемые фотоэлементами, используют способность металлов испускать поток электронов (фототок) под действием света.
Датчики с вентильным фотоэффектом, у которых фотоэлементы выполняют вакуумными и газонаполненными, не требуют источника электрического тока: при освещении светочувствительный слой создает электродвижущую силу, величина которой пропорциональна степени освещения, т.е. электроны из слоя освещенного вещества переходят в слой другого неосвещенного вещества.
Радиоактивные датчики. В устройстве радиоактивных датчиков использована способность радиоактивных лучей в определенной степени проникать в исследуемый материал или контролируемый объект. Радиоактивный датчик состоит из источника излучения и приемника – индуктора.
Акустические датчики. В устройстве акустических датчиков использован принцип измерения величины затухания упругих колебаний или времени прохождения ими определенного участка пути в измеряемой среде.
Вращающиеся трансформаторы. Вращающимся трансформатором называют индукционную электрическую машину, служащую для получения выходного напряжения в виде вполне определенной функции от угла поворота ротора.
8.2 Усилительные элементы систем автоматики
В автоматике широко применяются специальные устройства – усилители, способные в десятки и сотни раз увеличивать мощность сигнала, поступающего с выхода датчика. Необходимость применения усилителя объясняется тем, что выходной сигнал датчика обычно очень слаб и недостаточен для управления исполнительными механизмами.
Основными характеристиками усилителя являются его рабочая характеристика и коэффициент усиления.
Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами при установившемся режиме:
 .
.
Коэффициентом усиления усилителя называют отношение значений величин на выходе и на входе усилителя:
 .
.
В зависимости от средств передачи энергии усилители подразделяются на механические, гидравлические, пневматические, электрические, магнитные, электромагнитные и комбинированные. В автоматике наибольшее распространение получили рассмотренные ниже усилители, использующие в качестве внешнего источника электрическую энергию усиливающие сигнал по напряжению или мощности либо по напряжению и мощности одновременно. При этом иногда одновременно с усилением сигнала происходит преобразование переменного тока в постоянный или наоборот.
Электронные полупроводниковые усилители. К наиболее распространенным усилителям относятся усилители на электронных лампах, полупроводниковых приборах (транзисторах) и на интегральных микросхемах. В усилителях на электронных лампах основными элементами являются трехэлектронные или более сложные электронные лампы. Бурное развитие полупроводниковой техники вызвало широкое применение усилителей на полупроводниковых приборах, которые более надежны и компактны по сравнению с электронными лампами. Для построения полупроводниковых усилителей используют полупроводниковые триоды (транзисторы).
Транзисторы – это трехэлектродные полупроводниковые приборы. Они могут быть плоскостными и точечными. Широкое применение получили плоскостные транзисторы. В простейшем виде транзистор представляет собой пластину полупроводника с тремя чередующимися областями разной электропроводности, образующими два перехода. Две крайние области обладают проводимостью одного типа, средняя – проводимостью другого типа. Если в крайних областях преобладает дырочная проводимость, а в средней – элекронная, то такой прибор называют транзистором p – n – p типа (рис. 8.8, а).
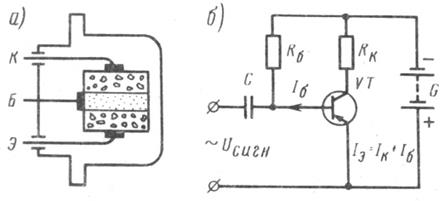
Рис. 8.8. Схема транзистора (а) и усилителя на транзисторе (б):
К – коллектор; Б – база; Э – эмиттер
У транзистора n – p – n типа, наоборот, по краям расположены области с электронной проводимостью, а между ними – область с дырочной проводимостью.
Магнитные усилители. Усилители этого вида относятся к ферромагнитным устройствам и предназначены для увеличения мощности подводимых электрических сигналов за счет энергии местного источника. С помощью магнитных усилителей можно осуществлять суммирование, дифференцирование, интегрирование и сравнение сигналов, стабилизацию напряжения и тока и т. д. В усилителях следящего привода их применяют в основном в оконечных и предоконечных каскадах мощного усиления.
Магнитные усилители обладают высоким коэффициентом полезного действия и значительными коэффициентами усиления по мощности и току. Они надежно работают как при нормальных условиях, так и при повышенной влажности, при высокой и низкой температурах, при тряске, вибрации, ударных ускорениях и др.
Неотъемлемой частью любого магнитного усилителя является ферромагнитный сердечник, кривая намагничивания которого имеет нелинейный характер. Магнитная проницаемость ферромагнитных материалов резко изменяется при подмагничивании их постоянным током. На этом и основан принцип действия магнитных усилителей.
Магнитные усилители обладают следующими положительными качествами: отсутствием электрической связи между цепью нагрузки и цепями управления, а также возможностью суммирования на обмотках управления нескольких входных сигналов, не связанных электрически; простотой и надежностью конструкции; легкостью эксплуатации; постоянной готовностью к действию; отсутствием вращающихся частей и подвижных контактов; возможностью значительных перегрузок; высоким коэффициентом полезного действия. Эти достоинства обеспечили магнитным усилителям широкое распространение. Они обеспечивают плавное регулирование частоты вращения двигателей постоянного ток и строгое соблюдение необходимого режима работы для основных регулируемых механизмов технологических процессов.
Электромагнитные усилители. Электромагнитные усилители – это специальные электрические генераторы постоянного тока, мощность на выходе которых регулируется путем изменения мощности управления. Однако наряду с достоинствами (большой коэффициент усиления мощности, сравнительно малые габаритные размеры) они обладают существенными недостатками (склонность к самовозбуждению, невысокая надежность и долговечность), что создает возможность применения их в малоответственных системах автоматического регулирования. ЭМУ в настоящее время не находят применения в системах автоматики в транспортном строительстве.
Реле. Одним из наиболее распространенных элементов автоматики является реле – устройство, реагирующее на изменение тех или иных факторов замыканием или размыканием своих контактов под воздействием электрического тока, световой энергии, давления жидкости или газов, уровня жидкости, температуры и т.п.
Параметр срабатывания реле – минимальное значение физической величины (тока, напряжения, давления и др.), при которой происходит срабатывание реле, т.е. изменение его состояния. На характеристике (рис. 8.9) параметр срабатывания реле соответствует  и скачкообразному изменению выходной величины
и скачкообразному изменению выходной величины  от
от  до
до  .
.
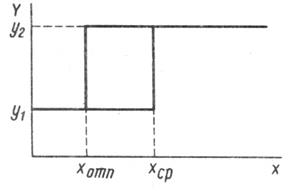
Рис. 8.9. Статическая характеристика реле
Параметр отпускания реле – максимальное значение физической величины (тока, напряжения, давления, температуры и др.) при котором реле возвращается в первоначальное состояние (на характеристике он соответствует  и скачкообразному изменению выходной величины от до ; обычно
и скачкообразному изменению выходной величины от до ; обычно  ).
).
По принципу действия реле подразделяют на электромеханические (электромагнитные, магнитоэлектрические, электродинамические и индукционные), электронные, тепловые, механические и др.
Электромагнитные реле получили наибольшее распространение в системах электроавтоматики и служат в основном для коммутации электрических цепей. Действие реле (рис. 8.10) заключается в притяжении стального якоря 2 к сердечнику 3 электромагнита, по обмотке 4 которого пропускается управляющий ток. При отсутствии тока якорь оттягивается от сердечника возвратной пружиной 1. Якорь замыкает или размыкает контакты 5. Электромагнитные реле по роду используемого тока подразделяются на реле постоянного и переменного тока.
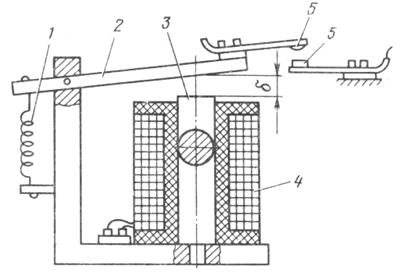
Рис. 8.10. Схема электромагнитного реле
Реле переменного тока (рис. 8.11) состоит из тех же деталей, что и реле постоянного тока. Отличие заключается в том, что сердечник 1, ярмо 2 и якорь 3 этого реле изготавливаются из листовой электротехнической стали с целью уменьшения потерь на гистерезис и вихревые токи. Сила притяжения якоря реле переменного тока принимает нулевые значения в момент прохождения магнитного потока, изменяющегося по синусоидальному закону, через нуль. В эти моменты возвратная пружина может оттянуть назад малоинерционный якорь и вызвать его вибрацию и даже искрение контактов реле. Для устранения этого нежелательного явления реле переменного тока изготавливают с короткозамкнутым витом 4, охватывающим часть сердечника (рис. 8.11). Реле имеют большое количество различных контактов и контактных пар на замыкание и размыкание.
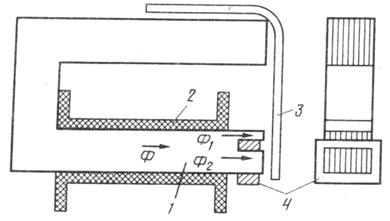
Рис. 8.11. Схема электромагнитного реле переменного тока
Реле постоянного тока являются наиболее распространенным видом реле. Они подразделяются на нейтральные и поляризованные. Поляризованное реле в отличие от нейтрального работает в зависимости от полярности приложенного напряжения. Поляризованное реле отличается от обычного электромагнитного реле дополнительной установкой постоянного магнита и зависимостью направления перемещения якоря от напряжения намагничивающего тока. Высокая чувствительность, малое время срабатывания и возможность реагирования на полярность управляемого сигнала делают реле незаменимым в автоматике. Поляризованные реле могут быть двухпозиционными и трехпозиционными с тремя устойчивыми положениями: средним и двумя крайними.
Тепловое реле срабатывает в результате изменения температуры. Основной частью большинства тепловых реле является биметаллическая пластина, состоящая из двух спаянных пластинок из различных металлов, имеющих разные коэффициенты температурного расширения. При пропускании тока по обмотке биметаллическая пластина, нагреваясь, изгибается и замыкает рабочие контакты. Тепловые реле находят широкое применение в различных схемах защиты, например в схеме защиты электродвигателей от перегрузки. В схемах автоматики применяют тепловые реле типов ТРВ-113, ВПУ, РВТ-150, РТ и др.
Реле времени – это специальное устройство, предназначенное для получения заданной выдержки времени при включении электрических цепей. Увеличение времени срабатывания или отпускания реле достигается магнитным, электрическим или механическим способом. Магнитный способ замедления действия реле предусматривает увеличение времени изменения магнитного потока. В этом случае на магнитопровод реле надевают медный короткозамкнутый виток, в котором при подаче напряжения на обмотку реле возникает электрический ток, создающий размагничивающий магнитный поток.
Контактором называют аппарат для дистанционного включения и отключения силовых электрических цепей. По принципу действия электромагнитный контактор аналогичен электромагнитному реле.
Как правило, контактор состоит из контактов, осуществляющих замыкание и размыкание силовой цепи тока, электромагнита и дугогасительного устройства. Кроме главных контакторов, зачастую устанавливают один или несколько блок-контактов, предназначенных для коммутации цепей управления, а также для связи с другими аппаратами сигнализации и электронной блокировки.
Магнитный пускатель представляет собой электромагнитный контактор переменного тока, смонтированный в стальном корпусе вместе с тепловым или другого типа реле защиты от перегрузки или коротких замыканий. В системах автоматического управления и регулирования магнитные пускатели могут быть применены для включения привода различных исполнительных механизмов, а также для дистанционного управления асинхронными двигателями малой и средней мощности.
Все большее применение в системах автоматического управления находят герметизированные магнитоуправляемые контакторы (МУК) – герконы, которые размещаются внутри обмотки и по существу представляют собой безъякорное реле. Контакты в виде двух пластин из ферромагнитного материала помещаются внутри стеклянной ампулы, наполненной аргоном (иногда водородом, азотом). При подаче входного сигнала в обмотку, внутри которой расположен магнитоуправляемый контакт (число их иногда достигает десятка), происходит намагничивание ферромагнитных пластин, возникают усилия притяжения и концы пластин образуют контакт, коммутирующий выходную цепь нагрузки. При отключении обмотки от источника сигнала пластины под действием упругих сил возвращаются в исходное положение. Малое расстояние между контактами и инерционность подвижных частей обеспечивают высокое быстродействие реле – время срабатывания их достигает 10 мкс. Магнитоуправляемые контакты часто используются во всякого рода конечных выключателях, счетчиках импульсов и т.д.
Электронное реле состоит из электронного усилителя и электромагнитного реле, катушка которого включена в выходную цепь усилителя. Благодаря усилителю мощность срабатывания электронного реле достигает 10-8 – 10-10 Вт. Основным достоинством электронных реле является то, что они реагируют на управляющие сигналы ничтожной мощности.
Фотореле называется устройство, скачкообразно переключающее электрическую цепь при изменении освещенности. В качестве элементов, реагирующих на освещенность, в фотореле используются фотоэлементы (фотодиод, фототранзистор или фоторезистор).
8.3 Исполнительные элементы систем автоматики
Исполнительные элементыустанавливаются на выходе (в конце основной цепи воздействия) автоматических устройств для воздействия на управляющие (регулирующие) органы управляемого процесса или объекта. При этом в ряде случаев в исполнительных элементах осуществляется преобразование энергии, получаемой от предыдущих элементов автоматического устройства, в вид, удобный для воздействия на органы управления объекта, а также усиление поступающего сигнала.
Для работы регулирующих органов требуются механические импульсы (например, для замыкания и размыкания контактов, для перемещения клапана и т.д.). Поэтому в составе исполнительных элементов часто имеются серводвигатели (усилители с перемещающимся выходным звеном).
Исполнительные устройства автоматики по принципу действия подразделяются на электрические, гидравлические и пневматические и служат для воздействия на регулирующие органы в соответствии с сигналом управления.
Электрические исполнительные устройства. Так называются устройства, преобразующие электрический ток в механические перемещения. К таким устройствам относятся электродвигатели переменного и постоянного тока и шаговые (импульсные), а также электромагнитные устройства – электромагнитные муфты, электромагнитные вентили, электромагниты с поворотным якорем и т.п.
Электродвигатели. Наибольшее распространение получили двигатели постоянного тока с независимым возбуждением и асинхронные двигатели (переменного тока) с короткозамкнутым ротором, которые по своим эксплуатационным качествам превосходят двигатели постоянного тока. Тем не менее двигатели постоянного тока, обладая высокими пускорегулирующими свойствами, находят широкое применение в специальных системах автоматики.
Рассмотрим две характерные схемы управления исполнительными двигателями постоянного тока с независимым возбуждением. В первой схеме (рис. 8.12, а) обмотка возбуждения подключена к источнику питания с постоянным напряжением  , а якорь к усилителю У. управление двигателем достигается изменением напряжения
, а якорь к усилителю У. управление двигателем достигается изменением напряжения  цепи якоря. Во второй схеме (рис. 8.12, б), наоборот, обмотка возбуждения подключена к усилителю У, а якорь – к источнику постоянного напряжения U.
цепи якоря. Во второй схеме (рис. 8.12, б), наоборот, обмотка возбуждения подключена к усилителю У, а якорь – к источнику постоянного напряжения U.
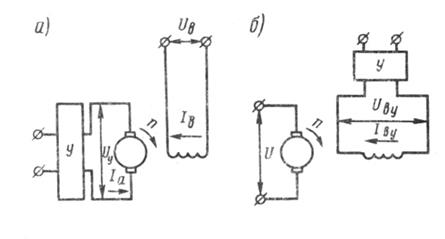
Рис. 8.12. Схемы управления двигателем постоянного тока
с независимым возбуждением
Из маломощных асинхронных двигателей переменного тока используют двухфазные, а из более мощных – трехфазные.
Двухфазные асинхронные исполнительные двигатели выполняются с короткозамкнутым ротором и с ротором в виде тонкостенного полого цилиндра. Последние отличаются малым моментом инерции и прим