Старооскольский технологический институт
(филиал)
Московского государственного института стали и сплавов
(технологического университета)
Уварова Л.В.
ОСНОВЫПРЕОБРАЗОВАТЕЛЬНОЙ ТЕХНИКИ
Часть II
Методические указания к выполнению
Лабораторных работ
Для студентов специальностей
Промышленная электроника
Электропривод и автоматика промышленных установок и технологических комплексов
Информационные системы и технологии
Автоматизация технологических процессов и производств
(очная, очно-заочная формы обучения)
Одобрено редакционно-издательским советом
Старый Оскол
Рецензенты:
Начальник АСУ прокатного производства М.Д. Вялых
Зам. начальника ЦЭТЛ С.И. Пономарев
Составитель: Уварова Л.В.
Методические указания к выполнению лабораторных работ по курсу: «Основы преобразовательной техники», часть II, для студентов специальностей 200400 – Промышленная электроника, 180400 – Электропривод и автоматика промышленных установок и технологических комплексов, 071900 – Информационные системы и технологии, 210200 – Автоматизация технологических процессов и производств.
© Уварова Л.В.
© СТИ МИСиС
Содержание
Лабораторная работа №2. 4
2.1 Цель работы.. 4
2.2 Теоретическое введение. 4
2.3 Описание работы.. 20
2.4 Порядок выполнения работы.. 20
2.5 Обработка результатов. 23
2.6 Содержание отчета к лабораторной работе. 23
2.7 Контрольные вопросы.. 24
Лабораторная работа №3. 24
3.1 Цель работы.. 24
3.2 Теоретическое введение. 24
3.3 Порядок выполнения работы.. 32
3.4 Содержание отчета к лабораторной работе. 36
3.5 Контрольные вопросы.. 37
Литература. 37
Лабораторная работа №2
Исследование схемы регулирования напряжения
Фазовым способом
Цель работы
Исследование схемы регулирования напряжения фазовым способом, выполненной на триодном тиристоре с использованием пакета Electronics Workbench.
Теоретическое введение
В цепях постоянного тока тиристор может быть применён в качестве ключевого элемента. Сразу условимся, что цепь питается постоянным напряжением, величина которого не изменяется во времени. Это условие необходимо т.к. в цепях питающихся переменным и выпрямленным несглаженным (пульсирующим) напряжением работа тиристора имеет свои особенности. Наиболее простая схема использования тиристора в качестве ключа показана на рис.1.

Рис. 1 Тиристор в качестве выключателя в цепи постоянного тока
Открывание тиристора VS осуществляется кратковременным нажатием на кнопку SB1. При этом в цепи УЭ тиристора проходит ток управления Iy = Vпит / R1. По истечению отрезка времени, дответствующего t вкл., тиристор переходит в открытое состояние и по цепи + Упит - кнSВ2 - нагрузка Rн –VS1 - (-Vпит) проходит ток, ограничиваемый лишь сопротивлением нагрузки. Сопротивление ограничивающего резистора R1 выбирается из условия
Vпит/Iу.мин >= R1 >= Vпит/Iу.мах (2)
где Vпит. - напряжение питания схемы,
Iу.мин. - минимальный ток управления, А
Iу мах - максимальный ток управления, А
Превышение значения Iу > Iу.мах может привести к выходуиз строя тиристора.
Резистор R2 шунтирует переход тиристора VS, защищая его от коммутационных напряжений. Выключить тиристор можно теми же методами, что и динистор. В данном случае для выключения тринистора, необходимо нажать кнопку SB2, размыкая при этом цепь анода тиристора. Также можно нажатием кнопки SB3, кратковременно шунтировать тиристор. В данной схеме тиристор выполняет роль механического ключа. Ток нагрузки не должен превышать предельно допустимый ток в цепи тринистора. Эта схема может быть использована для проверки тиристора, если в качестве нагрузки включить лампу накаливания.
Следует заметить, что после подачи включающего сигнала тиристор остаётся во включенном состоянии до тех пор, пока прямой ток через тиристор поддерживается большим, чем ток включения (ток удержания). При большом сопротивлении анодной нагрузки, прямой ток может оказаться меньше тока удержания, тогда тиристор будет находится в открытом состоянии только во время прохождения через УЭ тока управления.
Управление тиристором (его включение) импульсами тока имеет ряд своих особенностей, т.к. включение тиристора происходит с некоторым запаздыванием относительно фронта импульса управляющего тока. Время включения tвкл тиристора можно разбить на два интервала: время задержки tз, необходимое для накопления в базовой области структуры тиристора минимального заряда, достаточного для развития лавинообразного процесса и время нарастания анодного тока тиристора tнр., т.е. tвкл. = tз + tнp. Уровни по которым принято производить отсчёт указанных интервалов, показаны на рис.2. Обычно время задержки в несколько раз больше времени нарастания анодного тока. Для надежного отпирания тиристора необходимо запускающий импульс тока управления длительностью ty > tвкл. При увеличении амплитуды тока управления время задержки tз несколько сокращается и следовательно длительность запускающего импульса можно уменьшить.



Рис.2 График, иллюстрирующий процесс отпирания тиристора
Также следует заметить, что в справочнике указывают часто такие параметры тиристора как Iу.имп.max. и Iу.имп.мах. - это минимальное значение тока в импульсе, который гарантирует отпирание тиристора с заданной степенью надёжности Iу.имп.мах - это предельно допустимый ток, превышение которого может вывести тиристор из строя.
Для тиристоров указывают такие значения максимально допустимой средней мощности на УЭ Рср.доп. min I. Эта мощность для большинства тиристоров не превышает 1Вт. Управление тиристороами в промышленном оборудовании чаще всего осуществляется посредством коротких импульсов, для которых допустимая импульсная мощность выше допустимой средней мощности. Допустимую импульсную мощность можно определить по формуле
Римп.доп. = Рср.доп.·T/tu (3)
где tu - длительность прямоугольных управляющих импульсов, Т - период повторения импульсов, мкс. На практике допустимая импульсная мощность ни при каких условиях не должна превышать более чем в десять раз Рср.доп.
 Примеры импульсного переключения тиристоров приведены на рис.3
Примеры импульсного переключения тиристоров приведены на рис.3


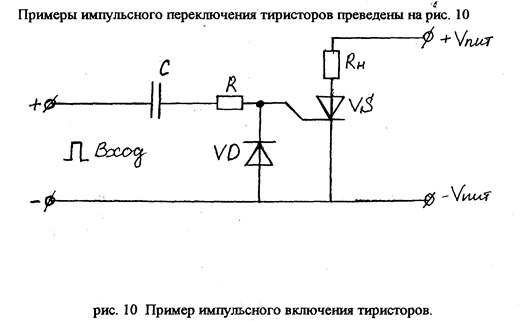
Рис. 3 Пример импульсного включения тиристоров
В схеме на рис. 3 емкость разделительного конденсатора С. должна быть такой, чтобы к концу действия пускового импульса в цепи управляющего электрода поддерживался бы ток Iynp > Iy.min. Диод VD, шунтирующий цепь УЭ - катод, предотвращает появление отрицательного импульса на УЭ при разряде конденсатора С через сопротивление R.
Схема на рис. 4 позволяет полностью осуществлять гальваническую развязку цепи управления от силовой цепи тиристора.. Резистор R и в этой схеме включается при небходимости для ограничения амплитуды тока управления Iу.имп. до безопасного (Iу.имп. < Iу.имп. max) для тиристора значения.


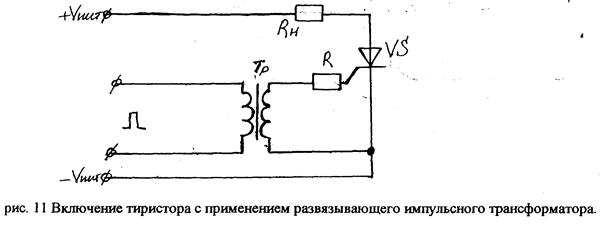
Рис.4 Включение тиристора с применением импульсного
трансформатора
Рассмотрим схему тиристорного выключателя постоянного тока, управляемого импульсными сигналами (рис.5). Принцип работы схемы заключается в следующем. В исходном состоянии тиристоры VS1 и VS2 заперты, напряжение на сопротивлении нагрузки rh и конденсаторе С отсутствует. Для включения от системы управления подают импульс *Вкл.* на тиристор VS1. Тиристор открывается и нагрузка Rн


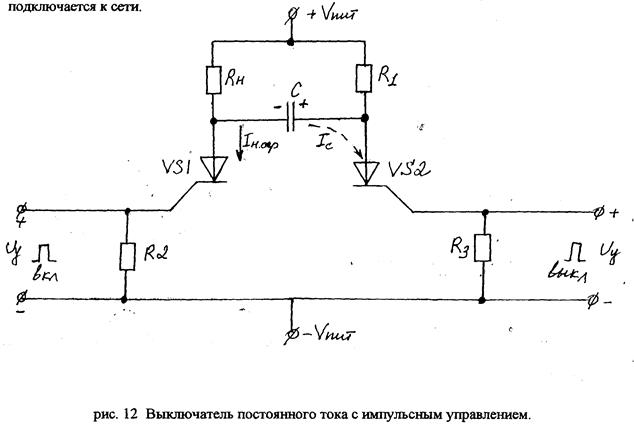
Рис. 5 Выключатель постоянного тока с импульсным управлением
Коммутирующий конденсатор заряжается почти до напряжения Vпит. В таком состоянии выключатель будет находиться до тех пор, пока не будет выдана команда на отключение, так как через тиристор VS1 проходит постоянный ток нагрузки, поддерживая его в открытом состоянии. Для отключения тока нагрузки необходимо подать сигнал *Выкл.* на управляющий электрод тиристора VS2. При этом тиристор VS2 отпирается, а тиристор VS1 запирается за счёт энергии разряда конденсатора С, так как ток при разряде конденсатора С замыкается через тиристор VS2 и VS1 навстречу рабочему току тиристора VS1. При снижении результирующего тока через тиристор VS1 до значения, меньшего Iуд, тиристор запирается и нагрузка Rh отключается от цепи. Сопротивление резистора R1 выбирают из условия
Rvs2/10...20>=R1>=Упит/Iвыкл2 (4)
где Rvs2 - сопротивление тиристора VS2 на участке анод-катод в закрытом состоянии; Ом;
Iвыкл.2 - ток выключения тиристора VS2; А;
Vпит. - напряжение питающей цепи; В.
После разряда конденсатора С тиристор VS2 также заперт, так как резистор R1 ограничивает анодный ток до значения, меньшего Iуд. Ёмкость коммутирующего конденсатора можно определить из выражения
C >=tвкл/R^2 (5)
где tвкл - время включения тиристора, мкс.
С - мкф
R^2 - Ом.
Резисторы R2, R3 предохраняют управляющие переходы тиристоров VS1, VS2 от кратковременных скачков Uy.
Особенностью работы тиристоров в цепях переменного тока является способность тиристоров запираться автоматически при переходе анодного тока через нуль. Дважды в течении перехода мгновенное значение напряжения в сети переменного тока равно 0. Если предположить, что в цепи нагрузки питаемой переменным током включён тиристор и момент прихода сигнала управления совпадает с моментом начала положительной полуволны на аноде тиристора, то тиристор отпирается и пропускает через свою структуру положительную волну практически полностью (рис.6)


Рис. 6 Работа тиристора в цепи переменного тока
Поскольку прямое (остаточное) падение напряжения на тиристоре в открытом состоянии не превышает нескольких вольт) амплитуда положительной полуволны на нагрузке (если напряжение в сети (значительное - десятки или сотни вольт) практически равна амплитуде напряжения в питающей сети и повторяет её форму. Как и для цепи постоянного тока, нагрузка в цепи должна быть такой, чтобы значение тока в цепи на протяжении всего полупериода превышало значение тока включения тиристора и в то же время, чтобы значение тока в цепи не превышало максимально допустимого тока через тиристор. С переходом сетевого перехода через нуль (или вблизи от него), ток в цепи становится равным нулю (или меньше Iвкл) и тиристор запирается. Следует отметить, что в полной мере вышесказанное справедливо для схемы с активной нагрузкой. Если нагрузка имеет активно-индуктивный характер, то процессы происходящие при переключении тиристора значительно усложняются. При отрицательной полуволне к тиристору приложено напряжение обратной полярности, тиристор заперт и далее приход управляющего сигнала не может привести его в открытое состояние. Для того, чтобы тиристор не вышел из строя, необходимо выбирать для схемы тиристор с максимально допустимым обратным постоянным напряжением выше, чем амплитуда напряжения в питающей сети переменного тока, т.е.
U oтp > U мс (6)
Использование одного тиристора в качестве ключа переменного тока (рис.16), как видно из диаграммы недопустимо, так как к нагрузке будет приложено не переменное, а пульсирующие напряжение (Из этой схемы видно, что тиристор как и диод, обладает свойством выпрямления переменного тока). Питать пульсирующим током нагрузку, работающую от сети переменного тока недопустимо. Поэтому в качестве выключатель переменного тока непригодна. Выключатель переменного тока должен подавать на нагрузку как положительную, так и отрицательную полуволну.
Рассмотрим одну из практических схем выключателя переменного тока на тиристорах (рис.7)



Рис.7 Тиристорный выключатель переменного тока
Выключатель обеспечивает дистанционное включение и отключение тока нагрузки по средством кнопок управления SB1 и SB2. Возможны варианты ручного управления с помощью тумблера или автоматического управления с помощью различных регуляторов. Управляющий импульс для отпирания тиристора формируется из анодного напряжения, тиристоры VS1 и VS2 включены в разрыв фазы между сетью и нагрузкой Rh встречно-параллельно. При срабатывании реле KV после нажатия на кнопку SB1 замыкаются контакты KV в цепи управления тиристорами. В положительный полупериод напряжение сети, управления проходит по цепи: фаза сети, диод VD2, замкнутые контакты KV, резистор R1, УЭ VS1, нагрузка rh, нуль сети. При протекании тока Iу через управляющий переход VS1, на УЭ создаётся падение напряжения Uy по отношению к катоду. Тиристор отпирается и напряжение сети прикладывается к нагрузке Rh. После включения тиристора цепь управления шунтируется. В отрицательный полупериод, напряжение сети тока управления проходит по цепи: нуль сети, нагрузка, диод VD1, резистор R1, замкнутые контакты реле KV, УЭ тиристора VS2, фаза сети. В этот полупериод отпирается тиристор VS2 и напряжение прикладывается к нагрузке. Таким образом при включённом реле KV каждый из резисторов проводит ток только в течении того полупериода, когда напряжение на его аноде положительно. Таким образом при включении реле KV каждый из тиристоров проводит ток только в течении того полупериода, когда напряжение на его аноде положительно. Тиристор отпирается в начале каждого положительного полупериода, напряжение на его аноде в тот момент, когда значение анодного напряжения
Ua = Iy.min*Rl + Uy + Ua (6)
где Uy - отпирающие напряжение УЭ, соответствующие току Iу.мин;
Uа - падение напряжения на диоде. Сопротивление резистора R1 выбирается из условия
Uc /Iy.min > R1 > Uc / Iу.мах (7)
где Uc - действующие значение напряжения сети
Диоды VD1 и VD2 предназначены для защиты цепи управления от обратного напряжения при отрицательных полупериодах напряжения на анодах VS 1 и VS2.
Поочередное запирание тиристоров происходит автоматически при изменении знака напряжения на аноде каждого из них, т.е. при переходе Uc через нуль. Отключение нагрузки от сети осуществляется наатием на кнопку SB2. При этом реле KV отключается, размыкая свои контакты в цепи управления тиристорами. Коммутируемая мощность зависит от типа применяемых тиристоров (допустимый прямой ток и обратное напряжение). Резистор R1 ограничивает ток в цепях УЭ VS1 и VS2. Цепочка R2C предназначена для защиты тиристора от коммутирующих напряжений.
Из диаграмм на рис.7 б следует, что к анодам VS1 и VS2 прикладывается синусоидальное напряжение сети Uc, а к управляющим электродам - короткие импульсы напряжения Uy, формируемые из диодного напряжения тиристоров.
Такие тиристоры широко применяются в регуляторах переменного напряжения.
Действующие значение переменного напряжения синусоидальной формы можно определить по формуле

где U - действующие значение напряжения, В;
Um - амплитудное (максимальное) значение напряжения. В;
Т - период переменного тока, с;
w - угловая частота, рад.
Из этого выражения следует, что изменить действующие значение напряжения можно либо регулировкой амплитуды (рис. 18 а), либо изменением во времени момента начала протекания тока при неизменной амплитуде напряжения (рис.18 б). В первом случае способ регулирования напряжения будет носить название амплитудного, а во втором фазового.


Рис. 8 Амплитудный (а) и фазовый (б) способы регулирования
напряжения
При амплитудном регулировании форма кривой напряжения остается синусоидальной с неизменным периодом. Этот способ реализуется с помощью автотрансформаторов, резистивных элементов и т.д.
При фазовом (тиристорном) регулирования амплитуда напряжения остается неизменной, а момент начала протекания тока через нагрузку определяется задержкой момента отпирания тиристоров, что вызывает уменьшение действующего значения напряжения на нагрузке. Наибольшее распространение получил в тиристорных регуляторах напряжения получил фазовый метод регулирования, при котором управляющий импульс отпирает тиристоры, сдвигается по фазе в пределах от 0 до 180 град. (На рис 8 б тиристор включается при угле фазового сдвига a. Угол b= 180 - a и называется углом проводимости тиристора. Так при a=0, b=180 и наоборот при a=180 b=0). При отпирании тиристоров в начале каждого полупериода (a близок к нулю) к нагрузке прикладывается полное напряжение сети, а при отпирании в конце полупериода (a близок к 180) напряжение равно нулю. Схемы включения тиристоров могут быть самыми разнообразными в зависимости от назначения регулятора и характера нагрузки.
Принцип регулирования с использованием тиристоров рассмотрим на примере однофазного регулятора с встречно - параллельным включением тиристоров (рис. 9)


Рис.9 Схема регулятора переменного напряжения со встречно – параллельным включением тиристоров
Тиристоры в схеме включены последовательно с нагрузкой Rh. Момент отпирания тиристоров регулируется схемой управления.
В течении первого полупериода ток нагрузки проходит через тиристор VS1, а в течении второго - через тиристор VS2. При подаче на УЭ тиристоры импульсов управления в начале каждого полупериода к нагрузке прикладывается синусоидальное напряжение, действующие значение которого равно напряжение сети.
При изменение момента отпирания тиристоров к нагрузке прикладывается напряжение, которое меньше напряжения сети, так как площадь синусоид при этом уменьшается (рис.9 б). Сопротивление нагрузки Rh шунтируют сопротивлением Rш, для того чтобы регулятор мог работать при холостом ходе. Это сопротивление должно быть таким, чтобы обеспечить протекание через тиристоры тока, который несколько больше тока удержания.
На работу тиристорного регулятора сильно влияет характер нагрузки. При активном характере нагрузки кривые тока и напряжения на нагрузке имеют одинаковую форму. Они представляют собой синусоиду (рис. 19 б), полупериоды которой обрезаны из-за наличии задержки при отпирании тиристоров (угла отправления a). На рис.19 в,г изображены кривые напряжений на анодах тиристоров VS1 и VS2.
Напряжение на тиристоре VS1, принимаемое за положительное в проводящем направлении, всегда равно и противоположно по знаку напряжению на тиристоре VS2. При отпирании тиристора VS1 к нагрузке прикладывается часть положительной полуволны напряжения на протяжении угла проводимости b, a при отпирании тиристора VS2 - часть отрицательной полуволны такой же продолжительности. Небольшое напряжение на открытых тиристорах Ua представляет собой прямое падение напряжения на внутреннем сопротивлении тиристора, вызванное током нагрузки. При активном сопротивлении нагрузки тиристоры запираются автоматически при переходе анодного напряжения через нуль. Схема управления вырабатывает импульсы управления тиристорами с требуемой амплитудой управления Uy, сдвинутых по времени от начала полуволны сетевого напряжения на необходимый угол a (рис. 9д).
Рассмотрим работу одной из практических схем тиристорного регулятора напряжения (рис.10)





Рис.10 Схема регулятора переменного напряжения выполненная на одном тиристоре
В схеме на рис.10 реализуется метод фазового регулирования. Принцип работы схемы заключается в следующем. При включённом тумблере SA и автомате защиты QF напряжение подаётся на выпрямительный мост UZ2 в диагональ которого включён тиристор VS1, и через трансформатор Т на схему управления, состоящую из фазосдвигающего устройства (ФСУ), ограничительного резистора R2 и выпрямительного моста UZ1, в диагональ которого включена цепь УЭ тиристора VS1. Рассмотрим принцип действия фазорегулятора с фазосдвигающей цепочкой RC, пользуясь рис. 21, где изображён фрагмент схемы на рис. 10.
 |


Рис. 11 Схема и векторная диаграмма фазосдвигающего устройства с RC-цепочкой
Фазорегулятор представляет собой мост, в котором два плеча образованы половинами вторичной обмотки трансформатора Т, а два - переменным резистором R и конденсатором С, В одну диагональ моста (точки 3,5) подводят синусоидальное напряжение обмотки U2, а с другой (точки 4,6) - снимается управляющие напряжение Uвых, сдвинутое по фазе на угол a относительно напряжения U2. Напряжение U2 вторичной обмотки трансформатора приложено к цепи RC, по которой протекает ток I, опережающий напряжение U2 на угол (j = a / 2, так как цепь RC емеет ёмкостный характер сопротивления. Напряжение на резисторе R совпадает по направлению с током I, а напряжение на конденсаторе С отстаёт от тока I на 90 град. (рис.21б).
Анализ векторной диаграммы показывает, что вектор напряжения на резисторе Ur сдвинут на угол (j относительно вектора напряжения вторичной обмотки U2 и выходит из той же точки 3. Вектор напряжения на конденсаторе Uc перпендикулярен вектору напряжения Ur из точки 2. Геометрическая сумма векторов Ur и Uc даёт суммарный вектор U2. Выходное напряжение фазорегулятора снимается между точками 4 и 6, поэтому вектор выходного напряжения будет выходить из точки 4, расположенной на середине вектора U2, так как точка 4 - средняя точка вторичной обмотки трансформатора. Конец вектора выходного напряжения находится в точке 6. Два вектора Ur и Uc всегда взаимно перпендикулярны, поэтому при изменении сопротивления резистора R конец вектора Uвых будет описывать окружность, а сам вектор Uвых - служить радиусом этой окружности. Таким образом, изменением сопротивления резистора R от максимального значения, близкого U2 до нуля, а угол А - от нескольких градусов до 180град. Угол регулирования А для данной схемы на холостом ходу можно определить как
А = arctgRC (8)
В зависимости от величины сопротивления R1 в схеме ФСУ на управляющий электрод тиристора VS через регулятор R2 и выпрямляющий мост UZ1 придёт положительная полуволна напряжения, сдвинутая на угол А относительно сетевой полуволны напряжения. Тиристор откроется и через выпрямительный мост UZ2 и нагрузку потечёт ток. Такая схема регулятора позволяет регулировать действующие значение напряжения на нагрузке от нескольких вольт до величины действующего напряжения в сети. Резистор R2 ограничивает до безопасного значения ток управляющего электрода тиристора.
Анализ и расчёт исследуемой цепи
Как уже известно, тиристор переходит в закрытое состояние при переходе анодного тока через нуль при работе в цепях переменного тока. Также и в цепи пульсирующего (выпрямленного) тока его значение один раз в течении периода равно 0. (рис. 12).

Рис.12 Пульсирующие (выпрямленное) напряжение
т.е. при работе в цепи пульсирующего тока при значении тока равным или близком к нулю, тиристор будет запираться. Поэтому тириcторы могут использоваться как в регуляторах переменного напряжения, так и в регуляторах пульсирующего (выпрямленного) напряжения. Рассмотрим схему такого регулятора, который и будет предложен в качестве схемы для монтажа и исследования (рис.13). Пунктиром на схеме (рис.13) обведено выпрямительное устройство, питающее нагрузку и регулятор выпрямленным (пульсирующем) напряжением.
Принцип действия схемы во многом совпадает с принципом действия регулятора переменного напряжения. На вход схемы поступает пульсирующее напряжение (рис.14 а)





Рис. 14 Временные диаграммы работы схемы регулятора
Последовательно с нагрузкой включён тиристор VS1. Схема управления по питанию включена параллельно тиристору, как и нагрузка схема питается пульсирующим напряжением. Параметрический стабилизатор RcrVDl поддерживает величину питающего напряжения схемы управления постоянной (рис.14 б).
Схема управления, состоящая из однопереходного транзистора VT1, времязадающего конденсатора С1 и резисторов Rl, R2 формирует управляющие импульсы на тиристор VS1, используя описанный выше фазовый метод регулирования. Рассмотрим этот процесс чуть подробнее. Однопереходный транзистор (ОПТ) VT1 имеет три вывода: эмиттер (Э), база 1 (Б1) и база 2 (Б2) (рис.15).


Рис. 15 Однопереходной транзистор
Участок между базами Б1 и Б2 обладает сопротивлением в несколько килоом и имеет обычную ВАХ как обычный резистор. ОПТ выполнен конструктивно на пластинке кремния с проводимостью n - типа. В кристалле методом диффузии выполнен р - n переход с выводом, называемым эмиттером. До тех пор, пока напряжение Uэ между эмиттером и базой Б1 меньше значения напряжения Ui (падение напряжения в кристалле между эмиттерным переходом и базой Б1). Эмиттерный переход смещён в обратном направлении и ток через цепь эмиттера мал (обратный ток
р - n перехода). При значении напряжения на эмиттере, которое может быть определено как Uэ.мах,
Uэ.мах >= Ui + Uпep = η · UБ1Б2 + 0.7,В (9)
где η = I2 / I2 – этот коэффициент определяется положением эмиттера на межбазовом промежутке и может составлять от 0.5 до 0.9
Unep - прямое напряжение на кремниевом переходе.
Эмиттерный переход смещается в прямом направлении, а сопротивление между эмиттером и базой Б1 уменьшается до единиц - десятков Ом. т.е. при выполнении условия (9), ОПТ работает в ключевом режиме. Изменение отпирающего напряжения Uэ.мах происходит пропорционально межбазовому напряжению UБ1Б2. Возможность работы ОПТ в ключевом режиме позволяет использовать его для генерации управляющих импульсов. Подключая к эмиттеру времязадающую цепочку Rl, R2, С1, можно получить управляемый генератор импульсов. В данной схеме, как и в регуляторах переменного напряжения, изменяя время включения тиристора относительно начала полуволны выпрямленного напряжения, можно изменять тем самым и величину значения средневыпрямленного напряжения Ua. Пусть (рис.14 а) начало полуволны выпрямленного напряжения соответствует 0 град, а её окончание - 180 град. Открывая тиристор не в начале полуволны, а с некоторой задержки на угол a, тем самым мы изменим значение средневыпрямленного напряжения на нагрузке. Это значение можно определить как
Uα = Uα0(l + cos α) / 2 (10)
где a - угол открывания тиристора, Uα0 - среднее значение выпрямленного напряжения при a = 0 (т.е. напряжение в нашем случае поступающие на вход схемы с неуправляемого выпрямителя).
Для того, чтобы обеспечить включение тиристора в соответствии с углом регулирования a и предназначена схема управления на ОПТ. Питание схемы управления пульсирующим напряжением необходимо для синхронизации работы схемы управления и входного напряжения. Поскольку и нагрузка, и схема питаются от одного источника напряжения, это условие выполняется автоматически. С приходом полуволны на вход схемы тиристор VS1 заперт, к базам транзистора приложено напряжение Uст (рис.14 б). Конденсатор С1 начинает заряжаться через резисторы R1 и R2 по экспоненте до величины Uэ.макс. (рис.14 в). В момент времени t1, соответствующему углу открывания a, транзистор VT1 открывается через малое сопротивление участка эмиттер – база Б1 – управляющий электрод – катод – минус источника начинается его быстрая разрядка, т.е. схема формирует управляющий импульс (рис. 14 г), который проходя через УЭ тиристора открывает его и схема управления отключается. В момент окончания полуволны (или близко к нему) тиристор выключается. С приходом следующей полуволны процесс, описанный выше, повторяется.
Изменяя сопротивление резистора R1. Можно изменить время заряда конденсатора С1 до величины Uэ.макс., соответственно при этом меняя угол открывания тиристора. Резистор R2 в схеме предназначен для установки минимального времени заряда конденсатора. Если вернуться к временной диаграмме напряжения на стабилитроне (рис. 14 б), то можно заметить, что питающее схему напряжение Uст постоянно по уровню с момента времени tмин. до момента времени tмакс. в период прохождения одной полуволны входного напряжения. Поэтому осуществлять управление тиристором с заданной надежностью можно лишь с момента времени tмакс. напряжение питания схемы начинает уменьшаться снова, поэтому управление тиристоров можно осуществлять лишь до момента времени tмакс. (допустимый максимальный угол открывания тиристора aмакс.).
 |
Для управления тиристором принимаем импульс управления с крутым передним фронтам, форма которого приведена на рис.16
Рис. 16 Импульс управления тиристором
Импульсный ток управления принимаем равным Iу.имп.=100мА, амплитуду импульса управления Uупр.имп.=6В. Принимаем длительность импульса управления tи=10мкс, (Время включения данного типа тиристора). В момент окончания импульса значение тока в импульсе не должно быть меньше значения отпирающего тока управления Iу.отп.
Описание работы
Исследование схемы регулирования напряжения фазовым способом, выполненной на триодном тиристоре с использованием пакета Electronics Workbench.
Пакет Electronics Workbench устанавливается в среде Microsoft Windows 95/98. Запуск пакета Electronics Workbench осуществляется нажатием левой клавиши мыши на ярлык программы Electronics Workbench Pro на рабочем столе или воспользовавшись меню пуск /программы/ Electronics Workbench / Electronics Workbench Pro. Выбираем необходимые элементы схемы в окошках, соединяем, запускаем схему, проводим необходимые измерения.
Порядок выполнения работы
В лабораторной работе требуется с использованием пакета Electronics Workbench построить и исследовать схему регулятора напряжения, выполненную на триодном тиристоре, предварительно сделав необходимый расчет.
Методика расчета
В качестве исходных данных заданы следующие величины:
Величина средневыпрямленного напряжения на входе схемы Uaо= 15,1 В
Величина сопротивления нагрузки Rн=43 Ом.
Рабочий ток стабилитрона VD1 Iст =2,46 мА.
В схеме используется идеальный тиристор
1. Выбираем стабилитрон VD1 c Uст=11,05 В
2. Пользуясь значением Iст в исходных данных определяем величину сопротивления балансного резистора R6, используя выражение Rб = (Uαo - Ucт) / Iст - Rh, Ом (13).
3. Ёмкость конденсатора С1=0,24 мкФ
4. Определяем величину tmin по выражению
 tmin = arcsin(Uст /
tmin = arcsin(Uст /  ·Uao), c
·Uao), c
2 π fc
где fc - частота сети, питающей выпрямитель. Значение arcsin необходимо определить в радианах.
5. Определим величину tмах
tmах = 1 / 2 fc - tmin, с
 6. Определим минимальный и максимальный углы регулирования выпрямленного напряжения по формулам
6. Определим минимальный и максимальный углы регулирования выпрямленного напряжения по формулам
αmin = arcsin(Ucт/ Uαо), град
αmax= 180град-αmin, град
7. Определим значения Uαmin и Uαmax по формулам
Uαmin = Uαo · (1 + cos αmax) / 2, В
Uαmax = Uαo · (1 + cos αmin) / 2, В
8. R1 = 2.62 кОм (для αmin) и 7 кОм (для αmax), R2 = 2 кОм, R3 = 33 кОм,
Rн = 43 Oм, Rb = 1.6 кОм, VD1 = GLL4741, VD2 – идеальный, C1 = 0.24 мкФ, E1 = E2 = 12.5 B, fc =50 Hz.