Московский государственный горный университет
Кафедра Электрификации и энергоэффективности
горных предприятий
Курсовой проект
Тема: “Синтез системы автоматического регулирования и комбинационного логического управляющего устройства”
Руководитель: проф. Шевырев Ю.В
Разработал: студент 4 курса фак-та ГЭМ
группы ГЭ-2-09 Диденко Ю.
Москва 2013 г.
СОДЕРЖАНИЕ
1. Синтез системы автоматического регулирования.
2. Синтез комбинационного логического управляющего устройства.
3. Список литературы.
СИНТЕЗ СИСТЕМЫАВТОМАТИЧЕСКОГО РЕГУЛИРОВАНЯ.
Задание №1. Вариант 14. T1=0,5 с, T2=0,1 с, Tµ=0,02 с, Kоб=5, Kос=0,5.
1. По заданной передаточной функции объекта регулирования определяем число больших постоянных времени.
Передаточная функция объекта регулирования равна
Wоб= 
В данной передаточной функции большими постоянными времени являются Т1 и Т2. Они подлежат компенсации.
2. Определяем число регуляторов.
Если компенсировать только часть больших постоянных времени, то это приводит к снижению быстродействия системы автоматического управления. Поэтому если в контуре регулирования имеется больше двух подлежащих компенсации постоянных времени, то прибегают к введению подчиненных контуров регулирования.
Деление объекта управления на звенья должно осуществляться таким образом, чтобы каждое звено содержало только одну большую постоянную времени, подлежащую компенсации. Тогда для решения задачи оптимизации достаточно последовательно с этим звеном включить регулятор, который может быть легко реализован технически, и ввести вспомогательные контуры регулирования по промежуточным переменным.
Каждому звену объекта управления соответствуют своя регулируемая координата и свой регулятор. Регулятор внешнего контура регулирования вырабатывает сигнал задания для внутреннего контура регулирования. В такой системе управления внутренний контур подчинен задаче регулирования выходной величины внешнего контура.
Поэтому данный принцип построения многоконтурной системы автоматического управления называется принципом подчиненного регулирования, а сами системы называются системами подчиненного регулирования координат.
Исходя из того что в нашем объекте регулирования присутствует две больших постоянных времени подлежащих компенсации нам необходимо два регулятора.
3.Структурная схема подчинённой САР. 
|
|
|

|

|

4.Настройка регуляторов на технический оптимум.
Так как T1>Tµ то регулятор 1 должен компенсировать постоянную времени T1. Тогда передаточная функция регулятора 1 равна.

Для настройки регулятора на технический оптимум a должно быть равно 2. Тогда передаточная функция регулятора равна.

Передаточная функция замкнутого контура равна

Выполненные расчеты и практика регулирования показывают, что при а³2, когда колебания демпфированы, без большой погрешности можно отбросить 2Tµ2p2. Тогда передаточная функция замкнутого контура равна.
Структурная схема с учетом преобразований.
Так как T2>2Tµ то регулятор 2 должен компенсировать постоянную времени T2. Тогда передаточная функция регулятора 2 равна.
Для настройки регулятора на технический оптимум a должно быть равно 2. Тогда передаточная функция регулятора равна.

Передаточная функция замкнутого контура равна

5. По полученной структурной схеме построим график переходного процесса по задающему воздействию. Сигнал задания g(t) принимаем равным единичной функции.
Схема в программе matlab
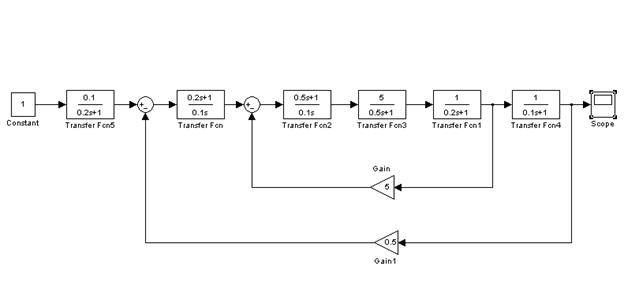
График переходного процесса

Вывод: tр=7, Δ=0%. В данной работе мы изучили настройку регуляторов на технический оптимум. Научились выполнять синтез системы автоматического регулирования.