Б И Л Е Т № 38
Переходные процессы в системе ТП-Д при пуске.
Линейное изменение ed, ed=кпt, на 3 – этапа.
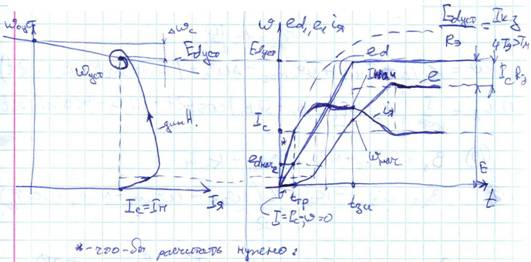
1. 0=tтр ; iя≤Ic; w=0 wнач=0; edнач=0., 
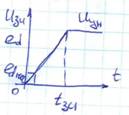
2. tтр≤t≤tзи , Ic≤iя= 
3. t≥tзи при Edуст, с ненул. начальными условиями окончание пуска при Edуст.
Два случая: 1) либо апериодический процесс 2-го порядка (отриц.вещ. корни). 2) Комплексные сопряженные корни.
1 этап пуска:
 ; w=0; edнач=0;
; w=0; edнач=0;

Хар-ое ур-ие:
Тэр+1=0;
 ;
;
 ;
;
 ТэД2+Д2t+Д3=kit;
ТэД2+Д2t+Д3=kit;
ТэД2+Д3=0;
Д3=Кi; Д3=-ТэКi

Для определения Д1 воспользуемся начальными условиями (t=0; iя=0);
0=Д1-КiTэ => Д1=КiТэ

2 этап пуска:
Начальные условия: w=0; wнач=0;  ; iя=Ic; tнач=0; Эти начальные условия необходимо подставить в уравнения
; iя=Ic; tнач=0; Эти начальные условия необходимо подставить в уравнения  и
и  (если корни отрицательные вещественные) или
(если корни отрицательные вещественные) или
 и
и
 (для комплексных корней).
(для комплексных корней).
3 этап пуска:
ed- установившееся 

Переходные процессы при отрицательных вещественных корнях – апериодический процесс.
Система скалярного управления асинхронным электродвигателем с обратной связью по току статора.
 Вариант функциональной схемы системы скалярного управления асинхронным частотно-регулируемым электроприводом с обратной связью по току статора представлен на рис.6.2. Здесь сигналы isa и isс , пропорциональные мгновенному значению токов обмоток статора фаз А и С, с выхода датчиков тока UAa и UAс поступают на функциональный преобразователь UI, где формируются выходные сигналы I 1и I 1 a, пропорциональные соответственно модулю абсолютного значения тока статора и активной составляющей этого тока. Выделение активной составляющей тока статора связано либо с векторным преобразованием токовых сигналов в UI, либо с измерением тока выпрямителя в преобразователях частоты с промежуточным звеном постоянного тока. Наиболее часто в скалярных системах частотного управления для простоты технических решений вместо активной составляющей тока статора на функциональные устройства А1 и А2 подается сигнал действующего значения тока статора I 1. В узлах å1 , å2 , å3 функциональной схемы выполняется суммирование сигналов управления и сигналов обратных связей, поступающих с функциональных устройств А1, А2 и А3. Вентиль V условно отражает прохождение сигнала ê I 1 êна вход А3 лишь при его превышении сигнала ê I 1max ê, соответствующего модулю максимально допустимого тока статора АД.
Вариант функциональной схемы системы скалярного управления асинхронным частотно-регулируемым электроприводом с обратной связью по току статора представлен на рис.6.2. Здесь сигналы isa и isс , пропорциональные мгновенному значению токов обмоток статора фаз А и С, с выхода датчиков тока UAa и UAс поступают на функциональный преобразователь UI, где формируются выходные сигналы I 1и I 1 a, пропорциональные соответственно модулю абсолютного значения тока статора и активной составляющей этого тока. Выделение активной составляющей тока статора связано либо с векторным преобразованием токовых сигналов в UI, либо с измерением тока выпрямителя в преобразователях частоты с промежуточным звеном постоянного тока. Наиболее часто в скалярных системах частотного управления для простоты технических решений вместо активной составляющей тока статора на функциональные устройства А1 и А2 подается сигнал действующего значения тока статора I 1. В узлах å1 , å2 , å3 функциональной схемы выполняется суммирование сигналов управления и сигналов обратных связей, поступающих с функциональных устройств А1, А2 и А3. Вентиль V условно отражает прохождение сигнала ê I 1 êна вход А3 лишь при его превышении сигнала ê I 1max ê, соответствующего модулю максимально допустимого тока статора АД.
 Оценим раздельно назначение каждого из контуров обратных связей и их влияние на свойства электропривода. Рис. 6.3, а поясняет влияние положительной обратной связи с пропорциональным коэффициентом усиления к 1 устройства А1 по действующему значению тока статора на переменные и механическую характеристику АД. Пусть при скорости идеального холостого хода w0.0, частоте f 1.0 и напряжении U 1.0 питания АД его магнитный поток намагничивания Фm. 0 . В разомкнутой системе управления при постоянстве частоты и напряжения питания по мере увеличения нагрузки на валу АД скорость w и поток намагничивания Фm двигателя уменьшаются. На рис.6.3, а соответствующие характеристики отражены тонкими линиями. В замкнутой системе по мере увеличения моментов статической нагрузки (М 1 , М 2 на рис. 6.3, а) АД и соответствующему увеличению тока статора на вход сумматора å2 со стороны А1 поступает дополнительный сигнал, увеличивающий сигнал u u. В итоге по мере увеличения тока статора увеличивается и выходное напряжение преобразователя частоты (линия U 1). При этом выходная частота UZF, определяемая сигналом uf, остается постоянной (линия f 1). Увеличение напряжения на обмотках статора АД способствует компенсации падения напряжения на полном их сопротивлении и, в результате, увеличению потока намагничивания АД (линия Фm).
Оценим раздельно назначение каждого из контуров обратных связей и их влияние на свойства электропривода. Рис. 6.3, а поясняет влияние положительной обратной связи с пропорциональным коэффициентом усиления к 1 устройства А1 по действующему значению тока статора на переменные и механическую характеристику АД. Пусть при скорости идеального холостого хода w0.0, частоте f 1.0 и напряжении U 1.0 питания АД его магнитный поток намагничивания Фm. 0 . В разомкнутой системе управления при постоянстве частоты и напряжения питания по мере увеличения нагрузки на валу АД скорость w и поток намагничивания Фm двигателя уменьшаются. На рис.6.3, а соответствующие характеристики отражены тонкими линиями. В замкнутой системе по мере увеличения моментов статической нагрузки (М 1 , М 2 на рис. 6.3, а) АД и соответствующему увеличению тока статора на вход сумматора å2 со стороны А1 поступает дополнительный сигнал, увеличивающий сигнал u u. В итоге по мере увеличения тока статора увеличивается и выходное напряжение преобразователя частоты (линия U 1). При этом выходная частота UZF, определяемая сигналом uf, остается постоянной (линия f 1). Увеличение напряжения на обмотках статора АД способствует компенсации падения напряжения на полном их сопротивлении и, в результате, увеличению потока намагничивания АД (линия Фm).
Степень компенсации определяется коэффициентом усиления к 1 цепи положительной обратной связи по току. Чем больше к 1 , тем больше будет поток при том же абсолютном скольжении. По мере увеличения к 1 увеличивается как абсолютное критическое скольжение, так и максимальный момент АД. Предел увеличения к 1 ограничен условиями устойчивости замкнутой системы управления и допустимыми значениями потока намагничивания и напряжения питания АД. По мере снижения частоты питания полное сопротивление цепи намагничивания и, соответственно, падение напряжения в статоре АД уменьшается. Поэтому для стабилизации и ограничения потока намагничивания в замкнутой по току системе степень компенсации падения напряжения и отсюда коэффициент к 1 необходимо уменьшать в соответствии с уменьшением полного сопротивления статорной цепи АД. Если это не предусмотрено, то максимально допустимый к 1 должен выбираться для режима работы АД при минимальной частоте, определяемой диапазоном регулирования скорости в замкнутой системе. При этом следует учесть, что даже при идеальном холостом ходе АД за счет заметных токов намагничивания в статорной цепи, обратная связь по полному току уже действует.
Подобный недостаток отсутствует при использовании обратной связи по активной составляющей тока статора. Ее можно выделить как при векторном преобразовании токов статора, так и измерением тока выпрямителя в преобразователях частоты с промежуточным звеном постоянного тока. Если в качестве сигнала обратной связи принять активную составляющую тока статора, как отражено на рис. 6.2, то регулирование скорости будет выполняться при постоянстве потокосцепления статора. При этом обеспечение той же перегрузочной способности АД по моменту, что и при обратной связи по полному току, потребует меньшей доли компенсации падения напряжения в статорной цепи и, соответственно, меньшего запаса по выходному напряжению преобразователя частоты.
В системе с подобными обратными связями по току возможна реализация механических характеристик АД с повышенной перегрузочной способностью по моменту и жесткостью, близкой к естественной в диапазоне регулирования скорости вниз от номинальной при постоянной статической нагрузке до 7: 1 [6].
Влияние положительной обратной связи по току с пропорциональным коэффициентом усиления к 2 устройства А2 связано с одновременным воздействием на выходные частоту и напряжение преобразователя UZF. За счет увеличения частоты питания АД при увеличении нагрузки на его валу (М 1, М 2 на рис. 6.3, б) соответственно увеличиваются скорости идеального холостого хода АД (w01 , w02 ), обеспечивая тем самым лишь стабилизацию скорости АД. За счет одновременного и пропорционального частоте увеличения напряжения питания АД при М с = const сохраняется постоянство и перегрузочной способности АД по моменту(М к @ const). При это поток намагничивания АД остается постоянным лишь на идеальном холостом ходу и снижается по мере увеличения нагрузки. Увеличением коэффициента к 2 можно добиться заметного увеличения жесткости механической характеристики АД, вплоть до абсолютного ее значения. Однако выбор к 2 ограничен условиями устойчивости замкнутой системы управления и допустимыми значениями частоты и напряжения питания АД.
Совокупность положительных обратных связей по току с использованием устройств А1 и А2, за счет стабилизации скорости последним позволяет заметно повысить жесткость механических характеристик АД (рис. 6.3, в) и при постоянной статической нагрузке увеличить диапазон регулирования скорости вниз от номинальной до 10: 1 [6].
Для защиты преобразователя частоты и двигателя от перегрузок по току используется режим его ограничения с помощью устройства токовой отсечки. На рис. 6.2 это устройство включает в себя узел суммирования å3 текущего ê I 1êи максимально допустимого ê I 1max ê модулей тока статора с разными знаками (узел сравнения), вентиль V и пропорционально-интегральный регулятор тока А3.При ê I 1 ê> ê I 1max êвентиль V пропускает сигнал превышения тока статора выше допустимого на вход А3, выходной сигнал которого может воздействовать как одновременно на частоту и выходное напряжение преобразователя (узел å1 ), так и лишь на напряжение преобразователя (узел å2 ).
При воздействии только на выходное напряжение преобразователя, при условии, что регулятор А3 имеет интегральный канал регулирования, за счет отрицательной обратной связи по току преобразователь из источника напряжения переходит в режим источника тока. Тогда при постоянстве тока статора АД, задаваемого со стороны преобразователя UF независимо от установленной со стороны управляющего сигнала u участоты, действие регулятора А3 отсечки по току за счет ее большего коэффициента обратной связи (для ПИ-регулятора бесконечно большого), чем устройства А1, будет сопровождаться уменьшением потока и момента двигателя, вызывая эффект опрокидывания механической характеристики АД. На рис. 6.3, а жирным пунктиром условно показана линия 1 механической характеристики АД в зоне работы отсечки при токе статора, соответствующего моменту нагрузки М 2 .Подобный режим работы отсечки с воздействием на выходное напряжение преобразователя частоты практически ограничен и используется лишь совместно с одновременным воздействием на выходную частоту преобразователя.
За счет поступающего на сумматор å1 сигнала отрицательной обратной связи по току статора (более сильной, чем со стороны устройства А2) совместно со стабилизацией тока осуществляется снижение его частоты и, соответственно, скорости идеального холостого хода АД. Тем самым обеспечивается постоянство магнитного потока, абсолютного скольжения и в итоге момента двигателя. На рис. 6.3, в жирным пунктиром условно показана линия 2 механической характеристики АД в зоне работы отсечки при токе статора, соответствующего моменту нагрузки М 2 . Статическая и динамическая точности их стабилизации при скалярном управлении ограничены сложными и нелинейными связями между переменными АД и условиями устойчивости замкнутых контуров регулирования.