Лекция10 осень 2017
ВИНТОВЫЕ МЕХАНИЗМЫ(механизмы «винт-гайка»)
Винтовые механизмы широко используются в конструкциях станочных приспособлений, особенно – в случае закрепления заготовок вручную.
Достоинствами винтовых механизмов являются:
- высокое передаточное отношение сил iп;
- свойство самоторможения;
- способны обеспечить любой длины ход конечного звена – зажимного элемента.
Обязательными элементами механизма являются винт и гайка. Один из этих элементов механизма при закреплении заготовки должен быть неподвижен в осевом направлении, другой должен быть лишён возможности поворота. Примеры применения винтовых механизмов показаны на рис. 10.1.
Заготовка 3 может быть закреплена непосредственно винтом 1(рис. 10.1, а). Винт совершает два движения – вращение и поступательное вдоль оси. Гайка 2 запрессована в корпусе приспособления.
Шпилька 4 ввинчена в корпус приспособления, и располагается в отверстии заготовки 3 (рис. 10.1, б). Закрепление заготовки осуществляется при навинчи- 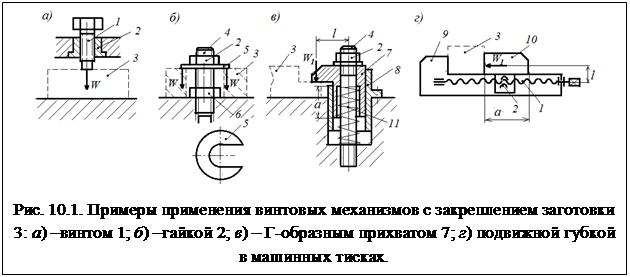
вании гайки 2 на неподвижную шпильку 4. Применение быстросъёмной шайбы 5 позволяет снимать заготовку после раскрепления, не свинчивая гайку со шпильки, чем значительно уменьшается время на закрепление-раскрепление. При раскреплении достаточно повернуть гайку 2 на один оборот, удалить из-под неё быстросъёмную шайбу и снять заготовку вверх со шпильки. Диаметр гайки 2 должен быть меньше отверстия в заготовке. Вывинчивание шпильки предотвращается контргайкой 6.
При навинчивании гайки 2 на шпильку 4 Г-образный прихват 7 Движется вниз в направляющем отверстии стакана 8 и закрепляет заготовку 3 (рис. 10.1, в). Пружина 11 поднимает прихват вверх при раскреплении заготовки.
В машинных тисках винт 1, вращаясь, сообщает осевое движение гайке 2, закреплённой на подвижной губке 10 тисков. Губка 10 в конце своего хода закрепляетзаготовку 3 (рис. 10.1, г).
Расчёт перемещений.
При повороте винта на один оборот гайка, не имеющая возможности вращаться, переместится на шаг резьбы. В тех случаях, когда гайка не может смещаться вдоль оси, перемещение SW будет совершать винт.
Сначала задаются минимальной длиной хода SW зажимного элемента механизма для его подвода к заготовке и последующего закрепления:
 (10.1)
(10.1)
где ∆г – гарантированный зазор, необходимый для свободной установки заготовки на опоры; ITH – допуск на размер Н заготовки в направлении оси винта; εв – суммарный люфт винтового механизма при изменении направления вращения винта; W/Jз – податливость (деформация) заготовки под действием силы W.
Передаточное отношение перемещенийу винтового механизма равно шагу резьбы:
 (10.2)
(10.2)
Из (10.1) находят число оборотов винта,необходимое для совершения перемещения  :
:
 (10.3)
(10.3)
Например, винтовой механизм с шагом резьбы Sр =3 мм должен осуществлять ход SW =1 мм. Из ф. (10.2) следует, что в конструкцию механизма нужно заложить поворот винта на 1/3 оборота (на 120°).
Расчёт сил закрепления.
 Силы, действующие в винтовом механизмев закреплённом состоянии, рассмотрим на примере одного витка резьбы (рис. 10.2, а). Внешняя сила Q, действующая нанекотором плече l, создаёт крутящий момент, стремящийся повернуть винт 1 относительно неподвижной гайки 2. Сопротивление этому моменту создают момент силы Ро.д . в резьбе и момент Мтр.п. сил трения F1 в «пяте» (в контакте с заготовкой либо с другой опорой, препятствующей осевому смещению винта или гайки). В данном случае пятой является нижняя торцовая плоскость винта. Пятой может быть кольцевая площадка трения в контакте гайки с шайбой (см. рис. 10.1, б и в), осевая опора винта в контакте с корпусом 9 машинных тисков (см. рис. 10.1, г).
Силы, действующие в винтовом механизмев закреплённом состоянии, рассмотрим на примере одного витка резьбы (рис. 10.2, а). Внешняя сила Q, действующая нанекотором плече l, создаёт крутящий момент, стремящийся повернуть винт 1 относительно неподвижной гайки 2. Сопротивление этому моменту создают момент силы Ро.д . в резьбе и момент Мтр.п. сил трения F1 в «пяте» (в контакте с заготовкой либо с другой опорой, препятствующей осевому смещению винта или гайки). В данном случае пятой является нижняя торцовая плоскость винта. Пятой может быть кольцевая площадка трения в контакте гайки с шайбой (см. рис. 10.1, б и в), осевая опора винта в контакте с корпусом 9 машинных тисков (см. рис. 10.1, г).
Плечом действия силы Ро.д . является половина среднего диаметра dср резьбы.На развёртке одного витка резьбы на плоскость (рис. 10.2, б), видна аналогия винта с плоским клином 1, на наклонной плоскости которого находится элемент 2 гайки. Отличие состоит в том, что на плоском клине действуют силы, а на винте – моменты сил. Винт можно рассматривать как плоский клин, навёрнутый своей боковой поверхностью на цилиндр.
Равновесие винта 1 в закреплённом состоянии (см. рис. 10.2, а)отражает уравнение моментов:
 (10.4)
(10.4)
Сила Ро.д . (по аналогии сплоским клином) равна:
 , (10.5)
, (10.5)
где  - угол подъёма резьбы (угол клина), а угол трения в резьбе
- угол подъёма резьбы (угол клина), а угол трения в резьбе  , поскольку коэффициент трения в резьбе больше, чем в плоском контакте тел. Здесь βр – угол профиля в поперечном сечении витка резьбы, для метрической резьбы βр =60°.
, поскольку коэффициент трения в резьбе больше, чем в плоском контакте тел. Здесь βр – угол профиля в поперечном сечении витка резьбы, для метрической резьбы βр =60°.
Момент трения в пяте
 (10.6)
(10.6)
равен силе трения в пяте, умноженной на плечо С, расчёт которого зависит от формы контактной поверхности в пяте.
 В отличие от трения при поступательном движении, в паре с вращением касательные напряжения трения создают разные моменты, находясь на разных расстояниях ρ от оси вращения. В пяте, имеющей форму кольца (рис. 10.3, а), давление, распределённое по площади опоры, равно:
В отличие от трения при поступательном движении, в паре с вращением касательные напряжения трения создают разные моменты, находясь на разных расстояниях ρ от оси вращения. В пяте, имеющей форму кольца (рис. 10.3, а), давление, распределённое по площади опоры, равно:
 (10.7)
(10.7)
Момент сил трения на кольцевой площадке ds с малой шириной dρ равен:
 (10.8)
(10.8)
После интегрирования по всей опорной площадке, момент сил трения на кольцевой пяте [2]:
 (10.9)
(10.9)
Здесь
 (10.10)
(10.10)
- плечо момента сил трения, f – коэффициент трения.
С= 0 (10.11)
Кольцевая пята имеет место у механизмов с закреплением гайкой (см. рис. 10.1, б, в) или в механизмах типа машинных тисков (см. рис. 10.1, г). При закреплении заготовок непосредственно винтом пята может иметь форму по рис. 10.3, б, в, г.
Плечо момента сил трения в пяте для сплошной круглой пяты (r = 0)
 (10.12)
(10.12)
Для сферической пяты принимают плечо действия сил трения в пяте С = 0, хотя в действительности, из-за упругих или пластических деформаций сферической пяты и контактирующей с ней поверхности заготовки площадка контакта существует. Закрепление винтом со сферической пятой применяют в случае малых сил закрепления W, когда деформациями закрепляемой поверхности из-за малости можно пренебречь.
Навесную пяту (см. рис. 10.1, г) используют для предотвращения смятия или задиров на закрепляемой поверхности. Площадь контакта такой пяты с заготовкой можно сделать любой, и тем самым обеспечить малое давление в контакте пяты с заготовкой при сохранении большой силы W. В процессе закрепления винт вращается, а пята 2 остаётся неподвижной. Трение имеет место в контакте сферического торца винта с коническим дном отверстия неподвижной пяты. Плечо момента сил трения в этом случае рассчитывают по формуле:
 (10.13)
(10.13)
Из уравнений (9.4) - (9.6) следует, что сила закрепления винтовым механизмом равна:
 (10.14)
(10.14)
Для вычисления силы Q при известной силе W это выражение преобразуют и приводят к виду:
 . (10.15)
. (10.15)
Винтовой механизм с Г-образным прихватом
В том случае, когда сила закрепления заготовки W1 смещена относительно оси винтаи вектора силы W, в направляющей подвижного элемента 2 механизма возникает перекос и повышенные потери на трение. Для нахождения этих потерьрассмотрим в равновесии Г-образный прихват (рис. 10.4). На прихват 2 действуют в вертикальном направлении: со стороны гайки 1 сила W и действующая ей противоположно сила W1, перенесённая на ось винта. Силы трения F2в контактеприхвата с направляющим отверстиемнаправлены навстречу W. Момент силы W1 на  плече l уравновешивается моментом сил реакций N2 с плечом а /2 относительно точки О.
плече l уравновешивается моментом сил реакций N2 с плечом а /2 относительно точки О.
Равновесие Г-образного прихвата 2, подвижного в направляющем отверстии с длиной контакта а, будет определяться двумя уравнениями статики – равенством нулю сил, действующих вдоль оси винта, и равенством нулю моментов, перекашивающих прихват относительно точки О:
 (10.16)
(10.16)
Из уравнения моментов следует:
 (10.17)
(10.17)
После подстановки (10.17) в уравнение равновесия сил (10.16) и преобразований относительно W1 получим:
 (10.18)
(10.18)
Механизм винт-гайка развивает усилие закрепления (см. выше):
(10.19)
После подстановки значения W из (10.19)в (10.18) получим окончательное выражение для силы W1 в случае применения Г-образного прихвата:
 . (10.20)
. (10.20)
В том случае, когда в механизме предусмотрена пружина 11 для подъёма прихвата при раскреплении заготовки (см., например, рис. 10.1, в), усилие закрепления заготовки уменьшится на величину усилия пружины в сжатом состоянии:
 (10.21)
(10.21)
где Рпр – усилие пружины,в сжатом состоянии в закреплённом механизме.
В формулах (10.20) и (10.21)  - приведенный коэффициент трения в направляющей подвижного звена (прихвата, губки тисков и др.), – угол трения в резьбе, tgφ1 – коэффициент трения в пяте винтового механизма.
- приведенный коэффициент трения в направляющей подвижного звена (прихвата, губки тисков и др.), – угол трения в резьбе, tgφ1 – коэффициент трения в пяте винтового механизма.