Равновесие эксцентрикового механизма в закреплённом состоянии отражает равенство моментов, действующих на эксцентрик 2 (рис. 10.4). Момент внешней силы Q, на плече l, уравновешивается моментом силы трения F1в контакте эксцентрика 2 с осью 3 (или в опорах оси) и моментом силы Ро.д . относительно оси О1:
 (10.24)
(10.24)
Здесь ρi радиус, проведенный от оси вращения О в i -туюточку контакта эксцентрика с заготовкой, d – диаметр оси 3. По аналогии с клиновым механизмом сила обратного действия:
 (10.25)
(10.25)
где αi– угол подъёма клиновой поверхности, равный углу наклона радиуса ρi к вертикали в точке i, φ – угол трения в контакте эксцентрика с заготовкой. При повороте эксцентрика точка i перемещается от точки n до точки m на наружной поверхности эксцентрика. При этом угол αi изменяется от нуля до αmax=arctg(2e/D) снова до нуля. Одновременно радиус ρi изменяется от ρmin до ρmax.
Сила трения F1 в контакте эксцентрика с осью равна:
 [1] (10.26)
[1] (10.26)
После подстановки (10.10), (10.11) в уравнение статики (10.9) и его решения относительно W получим:
 (10.27)
(10.27)
Поскольку положение точки контакта i неизвестно, то при расчёте силы W принимают:  и αi= αmax=arctg(2e/D). При меньших значениях αiв любой другой точке контакта i сила W будет превышать значение,рассчитанное по формуле (10.27).
и αi= αmax=arctg(2e/D). При меньших значениях αiв любой другой точке контакта i сила W будет превышать значение,рассчитанное по формуле (10.27).
Последовательность расчёта эксцентрикового механизма.
Расчёт эксцентрикового механизма начинают с вычисленияхода Sw, необходимого дляудобства установки заготовки, используя формулу:
 (10.28)
(10.28)
Здесь обозначены: ∆ г – гарантированный зазор между эксцентриком и заготовкой, обеспечивающий свободную установку заготовки на опоры перед закреплением; ITH – допуск на размер заготовки в направлении силы закрепления (см. рис. 10.7); W/Jз – податливость заготовки в направлении силы W; W/Jм - податливость механизма; hзап – запас хода, обеспечивающий гарантированное закрепление самой маленькой заготовки из партии точкой k на эксцентричной поверхности. В случае закрепления заготовки участками эксцентрика за пределами точки m радиусы ρi начнут уменьшаться и закрепление заготовки не произойдёт.
Следующим шагом в расчёте является определение эксцентрисит е та е. С учётом формулы (10.23):
 (10.29)
(10.29)
где Sw.max имеет значение, вычисленное по формуле (10.28).
Из опыта применения эксцентриковых механизмов известно, что самоторможение будет гарантированно обеспечено при соотношении наружного диаметра эксцентрика и эксцентриситета:
 . (10.30)
. (10.30)
Отсюда находят наружный диаметр D эксцентрика.
Диаметр оси d определяют из условия обеспечения её прочности на срез под действием силы W.
После нахождения параметров механизма Sw, D, e, d вычисляют значение силы W по известной силе Q с помощью формулы (10.27) (прямая задача), или вычисляют значение Q, если известно значение силы W, преобразуя формулу (10.27) - (обратная задача).
Достоинствами эксцентриковых механизмов является простота их изготовления, и свойство самоторможения.
Недостатками эксцентриковых механизмов являются:
- переменные значения угла подъёма αi и, как следствие, - переменные силы закрепления заготовки разными точками эксцентричной поверхности;
- малый ход Sw механизма, что затрудняет установку-снятие заготовок на приспособлении.
Пути облегчения установки заготовки. Срезанный эксцентрик позволяет
значительно увеличить гарантированный зазор ∆г для облегчения установки заготовки (рис. 10.6, а). На срезанном эксцентрике уменьшается длина дуги закрепляющей поверхности, – вместо дуги nk в закреплении участвует дуга rk. Это несколькоограничивает допуск на изготовление размера H заготовки.

 Другим известным решением является использование двойного эксцентрика (рис. 10.9). При повороте по часовой стрелке двойной эксцентрик 2 отталкивается эксцентричной поверхностью I от верхней опоры 1 и приближается к заготовке 4, смещаясь относительно оси вращения 3. Продолжение поворота сопровождается приближением к заготовке эксцентричной поверхности II с закреплением заготовки в конце хода. Максимальный суммарный ход закрепляющей точки эксцентрика по вертикали равен
Другим известным решением является использование двойного эксцентрика (рис. 10.9). При повороте по часовой стрелке двойной эксцентрик 2 отталкивается эксцентричной поверхностью I от верхней опоры 1 и приближается к заготовке 4, смещаясь относительно оси вращения 3. Продолжение поворота сопровождается приближением к заготовке эксцентричной поверхности II с закреплением заготовки в конце хода. Максимальный суммарный ход закрепляющей точки эксцентрика по вертикали равен
 (10.31)
(10.31)
МЕХАНИЗМЫСО СПИРАЛЬЮ АРХИМЕДА
Спиралью Архимеда называют траекторию точки А, движущейся с постоянной скоростью ν вдоль радиуса ОА при одновременном вращении радиуса вокруг точки О с постоянной угловой скоростью w (рис. 10.10).
Уравнение спирали Архимеда в полярных координатах: 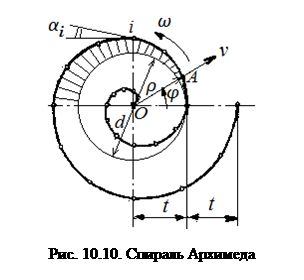
 (10.32)
(10.32)
В этом уравнении константа а - есть отношение скоростей движения точки радиального и по окружности:
 (10.33)
(10.33)
За полный оборот φ=2π приращение радиуса есть величина постоянная, называемая шагом спирали:
 (10.34)
(10.34)
С учётом (10.34) константа а может быть вычислена, зная шаг спирали, из выражения
 (10.35)
(10.35)
Угол подъёма спирали в любой её точке равен:
 (10.36)
(10.36)
Отметим, что с увеличением радиуса в точке i угол ai подъёма спирали уменьшается.
На любом отрезке спиральной линии площадка между спиралью и окружностью с произвольным диаметром d представляет собой клин, навёрнутый своим основанием на названную окружность (рис. 10.10). На этой основе построены механизмы с плоскими дисковыми кулачками и спирально-реечные механизмы, обладающие свойствами клина, наклонная поверхность которого выполнена в виде участка спирали Архимеда.
КУЛАЧКОВЫЕ МЕХАНИЗМЫ
 На дисковом кулачковом механизме (рис. 10.11) участок спирали Архимеда выполнен на наружной поверхности диска 1. При повороте вала 2 кулачок одной из точек на дуге С1С2 закрепляет заготовку 3. По аналогии с эксцентриковым механизмом развиваемое усилие закрепления вычисляют по формуле:
На дисковом кулачковом механизме (рис. 10.11) участок спирали Архимеда выполнен на наружной поверхности диска 1. При повороте вала 2 кулачок одной из точек на дуге С1С2 закрепляет заготовку 3. По аналогии с эксцентриковым механизмом развиваемое усилие закрепления вычисляют по формуле:
 (10.37)
(10.37)
где ρi – радиус в точку контакта кулачка с заготовкой; ρв – радиус вала в его опорах; L – плечо действия внешней силы Q; φ и tgφ1 – угол трения и коэффициент трения соответственно на спиральной поверхности кулачка 1 и в опорах вала 2.
Максимальный ход зажимной поверхности кулачка при подводе к заготовке
 (10.38)
(10.38)