Для характеристики вращательного движения твердого тела вокруг неподвижной оси введем понятие угловой скорости и углового ускорения. Алгебраической угловой скоростью тела в какой-либо момент времени называют первую производную по времени от угла поворота в этот момент, т.е.  . Она является величиной положительной при вращении тела против часовой стрелки, так как угол поворота возрастает с течением времени, и отрицательной – при вращении тела по часовой стрелке, потому что угол поворота при этом убывает.
. Она является величиной положительной при вращении тела против часовой стрелки, так как угол поворота возрастает с течением времени, и отрицательной – при вращении тела по часовой стрелке, потому что угол поворота при этом убывает.
Модуль угловой скорости обозначают  , тогда
, тогда

Размерность угловой скорости устанавливаем в соответствии с уравнением (2.40):

В технике угловая скорость – это частота вращения, выраженная в оборотах в минуту. За 1 минуту тело повернется на угол  , если n – число оборота в минуту. Разделив этот угол на число в минуте, получим
, если n – число оборота в минуту. Разделив этот угол на число в минуте, получим

 Алгебраическим угловым ускорением тела называют первую производную по времени от угловой скорости
Алгебраическим угловым ускорением тела называют первую производную по времени от угловой скорости  или
или  . Модуль углового ускорения обозначим
. Модуль углового ускорения обозначим  , тогда
, тогда

Размерность углового ускорения получаем из уравнения (2.42):

Алгебраическую угловую скорость и угловое ускорение на рисунках изображают дуговыми стрелками вокруг оси вращения. Дуговая стрелка для угловой скорости указывает направление вращения тела, а дуговая стрелка для углового ускорения – направление, в котором увеличивается алгебраическая угловая скорость.
· Скорости и ускорения точек тела
Известно уравнение вращения твердого тела вокруг неподвижной оси  (рис. 2.15). Расстояние s точки М в подвижной плоскости П по дуге окружности (траектории точки), отсчитываемое от точки
(рис. 2.15). Расстояние s точки М в подвижной плоскости П по дуге окружности (траектории точки), отсчитываемое от точки  , расположенной в неподвижной плоскости, выражается через угол
, расположенной в неподвижной плоскости, выражается через угол  зависимостью
зависимостью  , где
, где  – радиус окружности, по которой перемещается точка. Он является кратчайшим расстоянием от точки М до оси вращения. Его иногда называют радиусом вращения точки. У каждой точки тела радиус вращения остается неизменным при вращении тела вокруг неподвижной оси. Алгебраическую скорость точки М определяется по формуле
– радиус окружности, по которой перемещается точка. Он является кратчайшим расстоянием от точки М до оси вращения. Его иногда называют радиусом вращения точки. У каждой точки тела радиус вращения остается неизменным при вращении тела вокруг неподвижной оси. Алгебраическую скорость точки М определяется по формуле

а модуль скорости – по формуле
 (2.43)
(2.43)
Скорости точек направлены по касательным к траектории и, следовательно, перпендикулярны радиусам вращения.
 Скорости точек тела, расположенных на отрезке прямой ОМ, в соответствии с уравнением (2.15) распределяются по линейному закону. Они взаимно параллельны, и их концы располагаются на одной прямой, проходящей через ось вращения.
Скорости точек тела, расположенных на отрезке прямой ОМ, в соответствии с уравнением (2.15) распределяются по линейному закону. Они взаимно параллельны, и их концы располагаются на одной прямой, проходящей через ось вращения.
Ускорение точки разлагаем на касательную и нормальную составляющие, т.е.

Касательное и нормальное ускорения вычисляются по формулам
 (2.44)
(2.44)
Нормальное ускорение направлено по радиусу окружности к оси вращения. Направление касательного ускорения зависит от знака алгебраического углового ускорения.
Обозначив  угол между полным ускорением точки и ее радиусом вращения, имеем
угол между полным ускорением точки и ее радиусом вращения, имеем

Угол для всех точек тела один и тот же. Откладывать его следует от ускорения к радиусу вращения в направлении дуговой стрелки углового ускорения независимо от направления вращения твердого тела.
· Векторы угловой скорости и углового ускорения
Введем понятия векторов угловой скорости и углового ускорения тела. Если  - единичный вектор оси вращения, направленный в ее положительную сторону, то векторы угловой скорости
- единичный вектор оси вращения, направленный в ее положительную сторону, то векторы угловой скорости  и углового ускорения
и углового ускорения  определяют выражениями
определяют выражениями

Так как – постоянный по модулю и направлению вектор, то из уравнения (2.46) следует, что

При  и
и  направления векторов и совпадают. Они оба направлены в положительную сторону оси вращения Oz (рис. 2.17, а). Если и
направления векторов и совпадают. Они оба направлены в положительную сторону оси вращения Oz (рис. 2.17, а). Если и  , то они направлены в противоположные стороны (рис. 2.17, б). Вектор углового ускорения совпадает по направлению с вектором угловой скорости при ускоренном вращении и противоположен ему – при замедленном. Векторы и можно изображать в любых точках оси вращения. Они являются векторами скользящими.
, то они направлены в противоположные стороны (рис. 2.17, б). Вектор углового ускорения совпадает по направлению с вектором угловой скорости при ускоренном вращении и противоположен ему – при замедленном. Векторы и можно изображать в любых точках оси вращения. Они являются векторами скользящими.
· Векторные формулы для скоростей и ускорения точек тела
Выразим скорость, касательное, нормальное и полное ускорения точки тела в векторной форме. Скорость точки по модулю и направлению можно представить векторным произведением (рис. 2.18):

где  – радиус-вектор точки М, проведенный из произвольной точки оси вращения Oz, например точки О. Выражение (2.48) называется векторной формулой Эйлера.
– радиус-вектор точки М, проведенный из произвольной точки оси вращения Oz, например точки О. Выражение (2.48) называется векторной формулой Эйлера.
Из определения ускорения и векторной формулы Эйлера имеем

Учитывая, что

получаем

Первое слагаемое в уравнении (2.49) является касательным ускорением, а второе – нормальным, т.е.



Из определения скорости точки известно, что

где – радиус-вектор точки, приведенный из любой неподвижной точки, в частности, из любой точки на оси вращения тела, вращающегося вокруг неподвижной оси. Но скорость точки при вращательном движении тела определяется по векторной формуле Эйлера:

Сопоставление двух формул для скорости точки дает формулу для вычисления производной по времени от вектора :

В этой формуле вектор имеет постоянный модуль, так как соединяет все время две точки твердого тела. Вектор , являясь угловой скоростью вращения твердого тела вокруг неподвижной оси, выполняет также роль угловой скорости вращения вектора , жестоко скрепленного с телом.
Формула (2.51) остается справедливой также для вектора, начало которого находится в любой точке тела, а не только на оси вращения. По этой формуле вычисляется производная по времени от любого вектора, величина которого постоянна.
Тема 2.3. Плоское движение твердого тела
Плоским движением твердого тела называют такое его движение, при котором каждая его точка все время движется в одной и той же плоскости. Плоскости, в которых движутся отдельные точки, параллельны между собой и параллельны одной и той же неподвижной плоскости. Поэтому плоское движение твердого тела часто называют плоскопараллельным движением.
 Пусть твердое тело совершает плоское движение, параллельное неподвижной плоскости
Пусть твердое тело совершает плоское движение, параллельное неподвижной плоскости  (рис. 2.19). Тогда любая прямая, перпендикулярная этой плоскости и жестоко скрепленная своими точками с движущимся телом, будет двигаться поступательно, т.е. все точки этой прямой движутся одинаково.
(рис. 2.19). Тогда любая прямая, перпендикулярная этой плоскости и жестоко скрепленная своими точками с движущимся телом, будет двигаться поступательно, т.е. все точки этой прямой движутся одинаково.
Следовательно, для изучения движения точек, лежащих на рассматриваемой прямой, достаточно изучить движение одной точки этой прямой, например, точки М. Таким образом, для изучения плоского движения твердого тела достаточно изучить движение фигуры в ее плоскости, параллельной неподвижной плоскости .
2.3.1. Уравнения плоского движения твердого тела
Отнесем движение фигуры S к неподвижной системе отсчета Oxy, расположено в плоскости П. Положение фигуры в ее плоскости будет определено, если задать положения двух ее точек  и
и  или положение отрезка, соединяющего эти точки (рис. 2.20).
или положение отрезка, соединяющего эти точки (рис. 2.20).
 Очевидно, что
Очевидно, что

Из равенства (2.52) следует, что для определения положения отрезка  достаточно знать любые три координаты из четырех.
достаточно знать любые три координаты из четырех.
 Положение фигуры в ее плоскости можно определить иначе. Свяжем жестко с плоской фигурой систему координат
Положение фигуры в ее плоскости можно определить иначе. Свяжем жестко с плоской фигурой систему координат  . Положение этой системы будет определено, если известны положения начала и угол , образованный, например, осью
. Положение этой системы будет определено, если известны положения начала и угол , образованный, например, осью  с неподвижной осью Ox (рис. 2.21).
с неподвижной осью Ox (рис. 2.21).
При движении фигуры S в плоскости П координаты  и угол являются функциями времени:
и угол являются функциями времени:

Равенства (2.53), определяющие положение фигуры, называются уравнениями движения плоской фигуры или уравнениями плоского движения твердого тела. Точка  , выбранная для определения положения сечения S, называется полюсом.
, выбранная для определения положения сечения S, называется полюсом.
2.3.2. Разложение плоского движения твердого тела на поступательное и вращательное
Любое движение твердого тела, в том числе и движение плоской фигуры и ее плоскости, бесчисленным множеством способов можно разложить на два движения.
Действительное плоское перемещение фигуры из положения I в положение II может быть любым, но его всегда можно заменить двумя простыми плоскими перемещениями – поступательным и вращательным – так, чтобы конечное положение плоской фигуры в обоих случаях было одним и тем же. Поступательное перемещение
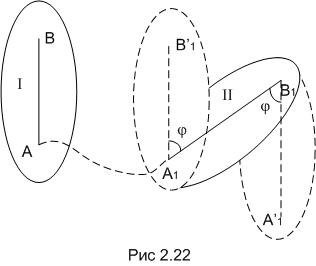 зависит от выбора точки фигуры, вместе с которой совершается это поступательное перемещение, в то время как угол поворота вокруг полюса не зависит от выбора полюса. На рис. 2.22 показаны случаи, когда за полюсы выбираются сначала точка А, а затем точка В.
зависит от выбора точки фигуры, вместе с которой совершается это поступательное перемещение, в то время как угол поворота вокруг полюса не зависит от выбора полюса. На рис. 2.22 показаны случаи, когда за полюсы выбираются сначала точка А, а затем точка В.
Рис.2.22
2.3.3. Угловая скорость и угловое ускорение тела
при плоском движении
Для характеристики вращательной части плоского движения твердого тела вокруг подвижной оси, проходящей через выбранный полюс, аналогично случаю вращения твердого тела вокруг неподвижной оси, можно ввести понятия угловой скорости  и углового ускорения
и углового ускорения  . Если угол поворота вокруг подвижной оси, проходящей через полюс, обозначить
. Если угол поворота вокруг подвижной оси, проходящей через полюс, обозначить  , то
, то

Так как вращательная часть движения не зависит от выбора полюса, то и характеристики этой части движения – угловая скорость и угловое ускорение – также не зависят от выбора полюса.
Вектор угловой скорости при плоском движении фигуры направлен по подвижной оси так, чтобы с конца его стрелки можно было видеть вращение фигуры против часовой стрелки. Вектор углового ускорения при ускоренном вращении фигуры совпадает с направлением вектора угловой скорости , а при замедленном вращении эти векторы имеют противоположные направления. Так как и не зависят от выбора полюса на плоской фигуре, то, следовательно, их можно приложить в любой точке фигуры, не изменяя модулей и направлений этих векторов, т.е. и являются свободными векторами. Вектор углового ускорения является первой производной по времени от вектора угловой скорости, т.е.

2.3.4. Скорости точек плоской фигуры
Зависимость между скоростями точек плоской фигуры устанавливается следующей теоремой:
Скорость любой точки плоской фигуры равна геометрической сумме скорости полюса и вращательной скорости этой точки вокруг полюса.
 б
б
Рис.2.23
Чтобы определить скорость любой точки плоской фигуры, например, точки В, точку А, скорость  , принимаем за полюс (рис. 2.23, а).
, принимаем за полюс (рис. 2.23, а).
Из неподвижной точки О проведем в точки А и В радиус векторы  и
и  . Во все время движения сохраняется зависимость
. Во все время движения сохраняется зависимость

где  – радиус-вектор точки В относительно полюса А. Вектор
– радиус-вектор точки В относительно полюса А. Вектор  является вектором постоянного модуля, так как расстояние между точками А и В твердого тела в процессе движения остается неизменным; этот вектор вращается вместе с телом с угловой скоростью .
является вектором постоянного модуля, так как расстояние между точками А и В твердого тела в процессе движения остается неизменным; этот вектор вращается вместе с телом с угловой скоростью .
Взяв производную по времени от равенства (2.56), получим

В этом выражении  – скорость полюса А, а
– скорость полюса А, а  – вращательная скорость точки В вокруг полюса А.
– вращательная скорость точки В вокруг полюса А.
Вращательная скорость  лежит в плоскости фигуры; она перпендикулярна отрезку АВ и направлена в сторону вращения плоской фигуры (рис. 2.23, б). Модуль вектора
лежит в плоскости фигуры; она перпендикулярна отрезку АВ и направлена в сторону вращения плоской фигуры (рис. 2.23, б). Модуль вектора  равен
равен

Окончательно имеем

2.3.5. Мгновенный центр скоростей
Точка плоской фигуры, скорость которой в данный момент времени равна нулю, называется мгновенным центром скоростей Р.
Приведем без доказательства теорему.
При плоском движении фигуры в ее плоскости в каждый момент времени, если  , существует мгновенный центр скоростей.
, существует мгновенный центр скоростей.
Такая точка P должна находиться на перпендикуляре AN, полученном при повороте вектора на угол 90  в направлении вращения фигуры (рис. 2.24), на расстоянии
в направлении вращения фигуры (рис. 2.24), на расстоянии 
Если положение мгновенного центра скоростей Р в данный момент времени известно, то приняв его за полюс и учитывая, что скорость его в этом случае равна нулю, получим следующие выражения для определения скоростей точек плоской фигуры (рис. 2.25):


перпендикулярна отрезку  , а скорость
, а скорость  – отрезку
– отрезку  .
.
Из уравнений (2.58) следует, что



Рис 2.24 Рис.2.25
т.е. угловая скорость плоской фигуры равна отношению скорости какой-либо точки длины отрезка, соединяющего точку с мгновенным центром скоростей, а модули скоростей точек плоской фигуры в каждый момент времени пропорциональны длинам отрезков, соединяющих эти точки с мгновенным центром скоростей. Мгновенный центр скоростей, очевидно, может лежать вне плоской фигуры. Но и в этом случае считается, что он принадлежит фигуре, полагая размеры фигуры неограниченными.
Рассмотрим способы нахождения мгновенного центра скоростей плоской фигуры:
1. Заданы скорость какой-либо точки фигуры и ее угловая скорость. Мгновенный центр скоростей Р будет найден, если провести луч, перпендикулярный скорости , в направлении вращения фигуры и отложить на этом луче отрезок  (см. рис. 2.24).
(см. рис. 2.24).
2. Если известны направления скоростей двух точек плоской фигуры и , причем скорость точки А не параллельна скорости точки В, то мгновенный центр скоростей находится на пересечении перпендикуляров к скоростям этих точек (рис. 2.26).
3. Если точка А и В лежат на общем перпендикуляре к скоростям и этих точек, скорости точек параллельны, то мгновенный центр скоростей Р находится на пересечении общего перпендикуляра и прямой, соединяющей концы векторов и , так как скорости точек плоской фигуры пропорциональны расстояниям этих точек до мгновенного центра скоростей (рис. 2.27 и 2.28).
Если скорости точек А и В равны между собой ( ) и перпендикулярны отрезку АВ (рис. 2.29), то мгновенный центр скоростей находится в бесконечности (
) и перпендикулярны отрезку АВ (рис. 2.29), то мгновенный центр скоростей находится в бесконечности ( ; угловая скорость фигуры
; угловая скорость фигуры  тело совершает мгновенное поступательное движение.
тело совершает мгновенное поступательное движение.



Рис.2.26 Рис.2.27 Рис.2.28
4. Заданы направления скоростей двух точек А и В плоской фигуры, причем скорости эти параллельны друг другу, но не перпендикулярны отрезку АВ (рис. 2.30). Проводя перпендикуляры к заданным направлениям скоростей в точках А и В, находим, что мгновенный центр скоростей лежит в бесконечности  . Если угловая скорость фигуры то тело совершает мгновенное поступательное движение; скорость всех его точек в данный момент времени равны между собой
. Если угловая скорость фигуры то тело совершает мгновенное поступательное движение; скорость всех его точек в данный момент времени равны между собой  .
.
5. Если тело катится без скольжения по поверхности неподвижного основания (рис. 2.31), то точка Р соприкосновения поверхностей тела и основания является мгновенным центром скоростей, поскольку точки контакта имеют одинаковую скорость.
2.3.6. Ускорения точек тела при плоском движении
Зависимость между ускорениями точек плоской фигуры определяется следующей теоремой:
Ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки во вращательном движении вокруг полюса.
 Пусть известно ускорение
Пусть известно ускорение  некоторой точки А и алгебраические величины угловой скорости и углового ускорения плоской фигуры. Определим ускорение любой точки В фигуры, приняв точку А за полюс (рис. 2.32).
некоторой точки А и алгебраические величины угловой скорости и углового ускорения плоской фигуры. Определим ускорение любой точки В фигуры, приняв точку А за полюс (рис. 2.32).
На основании теоремы о скоростях точек плоской фигуры имеем
 (2.61)
(2.61)
где .
Ускорение точки В определяется из выражения

Так как

то имеем

где  – касательное ускорение точки В во вращении вокруг полюса А;
– касательное ускорение точки В во вращении вокруг полюса А;  – нормальное ускорение точки В во вращении вокруг полюса А.
– нормальное ускорение точки В во вращении вокруг полюса А.
Модули этих векторов определяются по формулам
 (2.63)
(2.63)
Полное ускорение точки В во вращении вокруг полюса А
 (2.64)
(2.64)
равно по модулю
 (2.65)
(2.65)
и направлено под углом α к отрезку АВ

Окончательно, согласно уравнению (2.28), получим
 (2.67)
(2.67)
2.3.7. Мгновенный центр ускорения
Мгновенным центром ускорений называется точка плоской фигуры, ускорение которой в данный момент времени равно нулю. Обозначим ее Q.
Для построения мгновенного центра ускорений должны быть известны ускорение одной из точек , угловая скорость ω и угловое ускорение ε, причем предполагается, что ω и ε не равны нулю одновременно. Пусть (рис. 2.33). Из точки А откладываем под углом α  к ускорению отрезок прямой AQ:
к ускорению отрезок прямой AQ:

При этом угол α откладываем от в направлении дуговой стрелки углового ускорения ε, т.е. в рассматриваемом случае по часовой стрелке.
Если мгновенный центр ускорения известен, то, выбрав его за полюс, для ускорения точки А плоской фигуры получаем

и, следовательно,

Ускорение направлено под углом α к отрезку AQ, соединяющему точку А с мгновенным центром ускорений в сторону дуговой стрелки углового ускорения ε (рис. 2.34).
Для точки В аналогично

и ускорение  также направлено под углом α к отрезку BQ.
также направлено под углом α к отрезку BQ.
Согласно формулам (2.69) и (2.70) имеем

т.е. ускорения точек плоской фигуры пропорциональны расстояниям этих точек до мгновенного центра ускорений.
Лекция 2.4. Общий случай движения свободного твердого тела
Установлено, что всякое перемещение свободного твердого тела из одного положения в другое можно осуществить совокупностью двух перемещений: поступательного вместе с точкой, принятой за полюс, и поворота тела вокруг оси, проходящей через полюс.