2.4.1. Аналитическое определение положения абсолютно твердого тела. Углы Эйлера
 Покажем, каким образом можно задать шесть независимых параметров, однозначно определяющих положение абсолютно твердого тела. Пусть
Покажем, каким образом можно задать шесть независимых параметров, однозначно определяющих положение абсолютно твердого тела. Пусть  – неподвижная прямоугольная система координат и пусть твердое тело неизменно связано с некоторой другой подвижной, прямоугольной системой O 𝜉𝜂𝜁 (рис. 2.35).
– неподвижная прямоугольная система координат и пусть твердое тело неизменно связано с некоторой другой подвижной, прямоугольной системой O 𝜉𝜂𝜁 (рис. 2.35).
Координаты начала О подвижной системы относительно неподвижной следующие:

В общем случае, когда начала обеих систем координат различны, можно определить положение твердого тела тремя числами a, b, c и углами Эйлера φ, ψ, θ, определяющими положение подвижной системы O 𝜉𝜂𝜁 относительно третьей промежуточной системы координат  , начало которой совпадает с началом подвижной системы, а оси параллельны осям неподвижной.
, начало которой совпадает с началом подвижной системы, а оси параллельны осям неподвижной.
 Если прямая ОК есть прямая пересечения O 𝜉𝜂 и
Если прямая ОК есть прямая пересечения O 𝜉𝜂 и  , называемая линией узлов, то углы эти следующие (рис. 2.36):
, называемая линией узлов, то углы эти следующие (рис. 2.36):
1) угол φ между O 𝜉 и ОК;
2) угол ψ между ОК и  ;
;
3) угол θ между O 𝜁 и  .
.
Рис.2.36
Все углы берутся между положительными направлениями осей. Положительное направление линии узлов ОК выбирается так, чтобы наблюдатель, смотрящий вдоль КО, видел поворот к O 𝜁, против хода часовой стрелки.
По аналогии с терминами, принятыми в астрономии, эти углы иногда называют:
· φ – углом собственного вращения тела;
· ψ – углом прецессии;
· θ – углом нутации.
Движение свободного твердого тела определяется шестью уравнениями, называемыми уравнениями движения свободного твердого тела:

 (2.71)
(2.71)
Вид первых трех уравнений, определяющих поступательную часть движения твердого тела, зависит от выбора полюса, так как координаты различных точек тела различны. Вид остальных трех уравнений от выбора полюса не зависит.
2.4.2. Понятие мгновенного движения
Кинематическое состояние любого материального тела в рассматриваемый момент времени определяется расположением в пространстве его точек и их скоростям в этот момент. Движение тела мы представляем как непрерывный и последовательный переход его из одного кинематического состояния в другое. Наряду с определением положения точек движущегося тела, возникает вопрос о распределении скоростей точек тела в рассматриваемый момент времени.
Под мгновенным движением тела будем понимать лишь распределение скоростей точек движущегося тела в данный момент времени. Что касается траекторий точек тела и ускорений этих точек, то они могут быть какими угодно.
Допустим, что распределение скоростей точек твердого тела в данный момент времени определяется формулой

 где
где  – некоторая точка тела;
– некоторая точка тела;  – некоторый вектор, отложенный от этой точки (рис. 2.37). В этом случае будем говорить о мгновенном вращательном движении тела вокруг мгновенной оси вращения с вектором мгновенной угловой скорости, равным .
– некоторый вектор, отложенный от этой точки (рис. 2.37). В этом случае будем говорить о мгновенном вращательном движении тела вокруг мгновенной оси вращения с вектором мгновенной угловой скорости, равным .
Мгновенная ось вращения проходит через точку и определяется линией действия вектора .
2.4.3. Теорема Эйлера
Установим закон распределения скоростей точек тела в рассматриваемый момент времени (мгновенных скоростей) в общем случае движения свободного твердого тела.
Для любого движения твердого тела справедлива теорема:
 Всякое мгновенное движение твердого тела можно представить как результат сложения мгновенного поступательного движения со скоростью произвольно выбранной точки тела и мгновенного вращательного движения вокруг мгновенной оси вращения, проходящей через эту точку.
Всякое мгновенное движение твердого тела можно представить как результат сложения мгновенного поступательного движения со скоростью произвольно выбранной точки тела и мгновенного вращательного движения вокруг мгновенной оси вращения, проходящей через эту точку.
Для доказательства выберем в пространстве неподвижную систему координат Oxyz (рис. 2.38). Движение твердого тела можно определить, введя систему координат  , жестко связанную с телом. Тогда положение твердого тела определится положением полюса
, жестко связанную с телом. Тогда положение твердого тела определится положением полюса  и положением системы координат относительно Oxyz;
и положением системы координат относительно Oxyz;
 – орты осей координат.
– орты осей координат.
Из рис. 2.38 для точки М имеем

где  .
.
Вектор скорости точки М определим, дифференцируя выражение (2.72) по времени:

Второе слагаемое в равенстве (2.73) определим с учетом того, что вектор  , соединяющий две точки твердого тела, постоянный по величине
, соединяющий две точки твердого тела, постоянный по величине

где – вектор угловой скорости вращения твердого тела вокруг мгновенной оси вращения, проходящей через точку .
С учетом выражения (2.74) получим формулу для вектора  скорости любой точки М твердого тела:
скорости любой точки М твердого тела:

Векторы  и не зависят от выбора точки М. Второе слагаемое в формуле (2.75) есть та скорость, которую имела бы точка М, если бы тело вращалось вокруг некоторой неподвижной оси, проходящей через точку , с вектором угловой скорости, равным .
и не зависят от выбора точки М. Второе слагаемое в формуле (2.75) есть та скорость, которую имела бы точка М, если бы тело вращалось вокруг некоторой неподвижной оси, проходящей через точку , с вектором угловой скорости, равным .
Таким образом, движение твердого тела можно рассматривать как сложение двух движений: такого, в котором все точки тела имеют в данный момент одну и ту же скорость (что соответствует мгновенному поступательному движению) и другого – мгновенного вращения вокруг некоторой оси, проходящей через точку с угловой скоростью .
В следующий момент времени все векторы, входящие в правую часть формулы (2.75), изменяются. Никаких других мгновенных движений твердое тело, как это следует из приведенного доказательства, не имеет.
Теорема Эйлера доказана.
Доказано, что вектор мгновенной угловой скорости тела не зависит от выбора полюса .
Тема 2.5. Движение твердого тела, имеющего
одну неподвижную точку
Рассмотрим движение твердого тела, одна из точек которого во все время движения остается неподвижной. При таком движении все остальные точки тела движутся по сферическим поверхностям, центры которых совпадают с неподвижной точкой. Такое движение называют сферическим.
2.5.1. Уравнение сферического движения твердого тела. Мгновенная ось вращения и мгновенная угловая скорость
Для определения положения тела в каждый момент времени воспользуемся двумя системами осей координат: неподвижной системой Oxyz с началом в неподвижной точке О и подвижной системой O 𝜉𝜂𝜁, неизменно связанной с твердым телом, с началом в той же неподвижной точке О (рис. 2.39).
 Положение тела однозначно определяется тремя углами Эйлера – ψ, θ, φ. При движении твердого тела, одна из точек которого остается неподвижной, углы ψ, θ, φ непрерывно изменяются во времени, являясь функциями времени t:
Положение тела однозначно определяется тремя углами Эйлера – ψ, θ, φ. При движении твердого тела, одна из точек которого остается неподвижной, углы ψ, θ, φ непрерывно изменяются во времени, являясь функциями времени t:


Эти уравнения – уравнения сферического движения твердого тела. Рис.2.39
Для рассматриваемого движения теорема Эйлера может быть сформулирована так:
 Всякое мгновенное движение твердого тела, имеющего одну неподвижную точку, является мгновенным вращательным движением вокруг мгновенной оси вращения, проходящей через эту точку.
Всякое мгновенное движение твердого тела, имеющего одну неподвижную точку, является мгновенным вращательным движением вокруг мгновенной оси вращения, проходящей через эту точку.
В отличие от вращения твердого тела вокруг неподвижной оси, у вектора мгновенной угловой скорости с течением времени изменяется не только модуль, но и линия действия. Вектор откладывается от неподвижной точки О по мгновенной оси в такую сторону, чтобы, смотря навстречу
этому вектору, видеть вращение тела, Рис.2.40
происходящее против движения часовой стрелки (рис. 2.40). Мгновенная ось представляет собой геометрическое место точек тела, скорость которых в данный момент равна нулю.
2.5.2. Угловое ускорение тела при сферическом
движении
При сферическом движении тела положение мгновенной оси вращения со временем изменяется, и, следовательно, изменяется не только модуль, но и направление вектора угловой скорости тела.
Пусть моменту времени t соответствует вектор угловой скорости , а моменту времени  вектор
вектор  (рис. 2.41), ∆ - приращение вектора за время
(рис. 2.41), ∆ - приращение вектора за время  .
.
Вектор среднего углового ускорения определяется по формуле


Направление  совпадает с направлением
совпадает с направлением  . Предел этого отношения при
. Предел этого отношения при  называется угловым ускорением тела в момент времени t:
называется угловым ускорением тела в момент времени t:

 Если мы будем откладывать вектор от неподвижной точки О, то конец его опишет кривую или годограф скорости (рис. 2.42).
Если мы будем откладывать вектор от неподвижной точки О, то конец его опишет кривую или годограф скорости (рис. 2.42).
Определим скорость  движения точки А – конца вектора угловой скорости – по годографу в момент времени t. Радиус-вектор этой точки является вектор , а скорость точки равна
движения точки А – конца вектора угловой скорости – по годографу в момент времени t. Радиус-вектор этой точки является вектор , а скорость точки равна

 Так как векторы
Так как векторы  и равны одной и той же величине, то они равны между собой:
и равны одной и той же величине, то они равны между собой:
 (2.77)
(2.77)
т.е. угловое ускорение тела геометрически равно линейной скорости конца вектора угловой скорости. Вектор откладывается от неподвижной точки.
Прямая, по которой направлен вектор углового ускорения, называется осью углового ускорения и обозначается Е.
2.5.3. Скорости точек тела при сферическом движении. Формулы Эйлера
На основании теоремы Эйлера вектор скорости любой точки М твердого тела, имеющего одну неподвижную точку, равен

где  , а – вектор мгновенной угловой скорости тела (рис. 2.43).
, а – вектор мгновенной угловой скорости тела (рис. 2.43).
 Если мы обозначим через
Если мы обозначим через  проекции вектора на подвижные координаты оси Oxyz, а через x, y, z – координаты точки М в этой же системе координат, то получим
проекции вектора на подвижные координаты оси Oxyz, а через x, y, z – координаты точки М в этой же системе координат, то получим


где  – орты осей координат Oxyz. Тогда
– орты осей координат Oxyz. Тогда


Проекции вектора на неподвижные оси координат будут иметь вид

В правых частях формул изменяются и проекции и координаты точки М. Чтобы избежать последнего обстоятельства, проектируют векторное равенство (2.78) на подвижные оси координат O 𝜉𝜂𝜁, скрепленные с телом. Аналогично получаем:

В правых частях последних формул с течением времени изменяются только проекции векторов  , а координаты
, а координаты  точки М в подвижной системе координат, жестоко связанной с телом, остаются неизменными. Формулы (2.79) и (2.80) установлены Эйлером.
точки М в подвижной системе координат, жестоко связанной с телом, остаются неизменными. Формулы (2.79) и (2.80) установлены Эйлером.
Модуль скорости любой точки тела имеет вид
 (2.81)
(2.81)
 С другой стороны, поскольку скорость любой точки тела определяется как вращательная вокруг мгновенной оси, то модуль определяется по формуле
С другой стороны, поскольку скорость любой точки тела определяется как вращательная вокруг мгновенной оси, то модуль определяется по формуле

где  – длина перпендикуляра, опущенного из точки М на мгновенную ось вращения (рис. 2.44).
– длина перпендикуляра, опущенного из точки М на мгновенную ось вращения (рис. 2.44).
2.5.4. Ускорение точек твердого тела при сферическом движении. Теорема Ривальса
Для вычисления ускорения какой-либо точки тела при сферическом движении воспользуемся векторным выражением скорости этой же точки:

Ускорение точки определяется по формуле

Учтем, что

Тогда равенство (2.82) принимает вид


где  - вращательное ускорение точки;
- вращательное ускорение точки;  – осестремительное ускорение точки.
– осестремительное ускорение точки.
Таким образом,

Равенство (2.40) выражает теорему Ривальса об ускорении точки тела, совершающего сферическое движение.
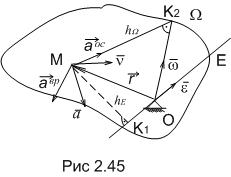 Ускорение любой точки твердого тела при сферическом движении определяется как геометрическая сумма ее вращательного и осестремительного ускорения (рис. 2.45).
Ускорение любой точки твердого тела при сферическом движении определяется как геометрическая сумма ее вращательного и осестремительного ускорения (рис. 2.45).
Модуль вращательного ускорения определяется следующим образом: Рис.2.45
 (2.84)
(2.84)
где  – кратчайшее расстояние от точки М до оси углового ускорения Е.
– кратчайшее расстояние от точки М до оси углового ускорения Е.
Направление  определяется по правилу векторного произведения.
определяется по правилу векторного произведения.
Вектор осестремительного ускорения  направлен перпендикулярно векторам
направлен перпендикулярно векторам  , т.е. по перпендикуляру, опущенному из точки М на мгновенную ось Ω.
, т.е. по перпендикуляру, опущенному из точки М на мгновенную ось Ω.
Модуль осестремительного ускорения определяется по формуле
 (2.85)
(2.85)
где  – кратчайшее расстояние от точки М до мгновенной оси вращения Ω.
– кратчайшее расстояние от точки М до мгновенной оси вращения Ω.
Модуль ускорения точки как диагональ параллелограмма ускорений можно определить по формуле
 (2.86)
(2.86)
2.5.5. Теорема об ускорении точек свободного
твердого тела
Ускорение точки свободного твердого тела равно геометрической сумме ускорения полюса, осестремительного ускорения точки и ее вращательного ускорения, определенных относительно мгновенных оси вращения и оси углового ускорения, проходящих через полюс.
Скорость произвольной точки М свободного тела (рис. 2.46) равна

Ускорение точки


где

– ускорение полюса O;  – вращательное ускорение точки М относительно оси углового ускорения Е, проходящей через полюс О;
– вращательное ускорение точки М относительно оси углового ускорения Е, проходящей через полюс О;  – осестремительное ускорение точки М относительно мгновенной оси вращения Ω, проходящей через полюс О. Поэтому
– осестремительное ускорение точки М относительно мгновенной оси вращения Ω, проходящей через полюс О. Поэтому
 . (2.88)
. (2.88)
Тема 2.6. Сложное движение точки
Сложное движение точки – это такое движение, при котором точка (тело) одновременно участвует в двух или нескольких движениях.
Примером сложного движения могут служить: движение пассажира, перемещающегося в вагоне движущегося поезда; движение человека, перемещающегося по лестнице движущегося эскалатора.
2.6.1. Относительное, переносное и абсолютное
движение точки
 Рассмотрим движущееся тело А (рис. 2.47) и точку М, не принадлежащую этому телу, а совершающую по отношению к нему некоторое движение.
Рассмотрим движущееся тело А (рис. 2.47) и точку М, не принадлежащую этому телу, а совершающую по отношению к нему некоторое движение.
Через произвольную точку О движущегося тела проведем неизменно связанные с этим телом оси Ox, Oy, Oz. Систему осей Oxyz называют подвижной системой отсчета. Неподвижной системой отсчета называют систему осей O1x1y1z1, связанную с некоторым условно неподвижным телом, обычно с Землей.
Движение точки М по отношению к неподвижной системе отсчета называют абсолютным движением точки.
Скорость и ускорение точки в абсолютном движении называют абсолютной скоростью и абсолютным ускорением точки и обозначают  и
и  .
.
Движение точки М по отношению к подвижной системе отсчета называют относительным движением точки.
Скорость и ускорение точки в относительном движении называют относительной скоростью и относительным ускорением точки и обозначают  и
и  .
.
Движение подвижной системы отсчета Oxyz и связанного с ней тела А по отношению к неподвижной системе отсчета O1x1y1z1 является для точки М переносным движением.
Скорость и ускорение точки тела А, связанного с подвижной системой отсчета, совпадающей в данный момент с движущейся точкой М, называют переносной скоростью и переносным ускорением точки М и обозначают  и
и  . Например, если человек идет вдоль радиуса вращающейся платформы (рис. 2.48), то с платформой можно связать подвижную систему отсчета, а с Землей – неподвижную. Тогда движение платформы будет переносным, движение человека относительно платформы – относительным, а движение человека относительно Земли – абсолютным движением.
. Например, если человек идет вдоль радиуса вращающейся платформы (рис. 2.48), то с платформой можно связать подвижную систему отсчета, а с Землей – неподвижную. Тогда движение платформы будет переносным, движение человека относительно платформы – относительным, а движение человека относительно Земли – абсолютным движением.
Переносной скоростью человека и переносным ускорением является скорость и ускорение той точки платформы, где находится в данный момент человек.
 Движение точки М (см. рис. 2.48) по отношению к неподвижной системе отсчета, которое названо абсолютным движением, является сложным, состоящим из относительного и переносного движения точки.
Движение точки М (см. рис. 2.48) по отношению к неподвижной системе отсчета, которое названо абсолютным движением, является сложным, состоящим из относительного и переносного движения точки.
Основная задача изучения сложного движения состоит в установлении зависимости между скоростями и ускорениями относительного, переносного и абсолютного движений точки.
Положение точки М относительно неподвижной системы отсчета определяется радиус-вектором  . Положение точки М относительно подвижной системы отсчета определяется радиус-вектором
. Положение точки М относительно подвижной системы отсчета определяется радиус-вектором  или тремя координатами x, y, z:
или тремя координатами x, y, z:

Изменение радиус-вектора характеризует относительное движение точки М. Таким образом, уравнения относительного движения точки имеют вид
 (2.89)
(2.89)
2.6.2. Абсолютная и относительная производные от вектора. Формула Бура
При рассмотрении сложного движения точки в общем случае переносного движения определяют изменения векторных величин с течением времени по отношению к системам отсчета, движущимся друг относительно друга.
 Введем обозначение производных от векторных величин при рассмотрении их изменения относительно различных систем отсчета. Для любого вектора
Введем обозначение производных от векторных величин при рассмотрении их изменения относительно различных систем отсчета. Для любого вектора  его производную по времени по отношению к неподвижной системе отсчета называют полной (или абсолютной) производной и обозначают
его производную по времени по отношению к неподвижной системе отсчета называют полной (или абсолютной) производной и обозначают  . Производную по времени при учете изменения вектора относительно подвижной системы отсчета называют относительной или локальной производной и обозначают или
. Производную по времени при учете изменения вектора относительно подвижной системы отсчета называют относительной или локальной производной и обозначают или  .
.
Установим зависимость между полной и относительной производными по времени векторов и величинами, характеризующими движение подвижной системы отсчета относительно неподвижной. Для этого разложим вектор  на составляющие, параллельные осям подвижной системы координат (рис. 2.49):
на составляющие, параллельные осям подвижной системы координат (рис. 2.49):

Изменение вектора относительно неподвижной системы отсчета O1x1y1z1 в зависимости от времени состоит из изменений его проекций  ,
,  ,
,  и единичных векторов
и единичных векторов  ,
,  ,
,  подвижных осей вследствие движения подвижной системы координат относительно неподвижной. Вычислим полную производную:
подвижных осей вследствие движения подвижной системы координат относительно неподвижной. Вычислим полную производную:

Первые три слагаемые выражения (2.91) учитывают изменение вектора при неизменных , , и поэтому составляют относительную производную

Производные по времени единичных векторов определим по формулам Пуассона:

так как эти векторы не изменяются от поступательного движения со скоростью  вместе с подвижной системой отсчета. Вектор – угловая скорость вращения подвижной системы отсчета вокруг мгновенной оси вращения, проходящей через точку О. Подставляя значения производных единичных векторов в выражение (2.91), получим
вместе с подвижной системой отсчета. Вектор – угловая скорость вращения подвижной системы отсчета вокруг мгновенной оси вращения, проходящей через точку О. Подставляя значения производных единичных векторов в выражение (2.91), получим

или, учитывая выражение (2.41),

Формула (2.92) – это формула Бура зависимости производных вектора в двух системах отсчета, движущихся друг относительно друга. Из этой формулы следует, что поступательная часть движения вместе с полюсом не влияет на зависимость между производными, а влияет только вращательная часть движения.
2.6.3. Теорема о сложении скоростей
Движение подвижной системы осей координат относительно неподвижной можно охарактеризовать скоростью ее поступательного движения  вместе с точкой О и вектором угловой скорости
вместе с точкой О и вектором угловой скорости  ее вращения вокруг мгновенной оси вращения, проходящей через точку О (рис. 2.50).
ее вращения вокруг мгновенной оси вращения, проходящей через точку О (рис. 2.50).