 Действующее значение тока нагрузки
Действующее значение тока нагрузки
7-1
Основными частями СД являются статор и ротор.
Сердечник статора собран из изолированных друг от друга пластин эл/тех стали.
В пазах размещена обмотка IIIф переменного тока.
Ротор предст собой электромагнит – явнополюсный
1-полюсы; 2-полюсные катушки; 3-сердечник ротора; 4-контактные кольца.
неявнополюсный
1-сердечник ротора; 2-пазы с обмоткой; 3-контактные кольца.
Наложение магнитных полей токов в фазных обмотках статора возбуждает в СМ магнитное поле, вращающееся с угловой скоростью w.
Генератор.
Увеличить мех. момент, приложенный первичным двигателем к валу машины. Тогда под действием возросшего вращающего момента ось магн. полюсов
ротора повернется на угол g. Т.к. магн. поле изменится, то ток в обмотках статора тоже изменится. Взаимодействие этого тока с магн. полем ротора создает тормозной момент, действующий на ротор. Это и означает преобразование мех. мощности первичного двигателя в эл. мощность генератора.
7-2
Опытом х/х называется испытание трансформатора при разомкнутой цепи вторичной обмотки и номинальном первичном напряжении U1x=U1ном.
На основании этого опыта определяют коэффициент трансформации и мощность потерь в магнитопроводе трансформатора.

Мощность потерь в магнитопроводе трансформатора

т.е представляет собой потери в стали (из-за малости  можно пренебречь) при номинальном первичном напряжении. Эти потери не зависят от нагрузки трансф-ра и называются постоянными.
можно пренебречь) при номинальном первичном напряжении. Эти потери не зависят от нагрузки трансф-ра и называются постоянными.
Опытом к/з называют испытание трансф-ра при короткозамкнутой цепи вторичной обмотки (U2=0) и номинальном первичном токе I1K=I1ном.
Этот опыт служит для определения мощности потерь в проводах, внутреннего падения напряжения.
Напряжение короткого замыкания Uк

Т.к. Uк<<U1ном, то пропорциональный напряжению магнитный поток Ф имеет небольшую величину, и вызываемые им потери в сердечнике незначительны. Мощность при к/з расходуется только на нагрев обмоток, т.е. равна потерям в меди при номинальном режиме:

Входное сопротивление трансформатора

7-3
Для уменьшения пульсации м/у выпрямителем и нагрузкой устанавливается сглаживающий фильтр.
Основным параметром сглаживающих фильтров является коэффициент сглаживания.
Коэффициентом сглаживания называют отношение коэфф. пульсации на входе филтра к коэфф. пульсации на выходе фильтра. 
Принципиальная схема
Если пренебречь влиянием высших гармоник выпрямленного тока, то можно для расчета сглаживающего фильтра составить эквивалентную схему выпрямителя, состоящую из последовательно соединенных ГПТ с напряжением U0 и ГперемТока с напряжением
u=Umsinwt w-угловая частота гармоники
Эквивалентная схема
 коэфф. сглаживания
коэфф. сглаживания
 емкость конденсатора (мкФ):
емкость конденсатора (мкФ):
8-1
Значение величин переменного тока, векторные диаграммы.
Значения величин переменного тока
1) мгновенное значения тока – это значение в какой-то период времени
i, e, u, p и т.д.
2) максимальное значение – это наибольшее значение переменной величины за период времени
Im, Um, Em и т.д.
3) действующее (эффективное) значение переменного тока – это такое значение которое приравнивается к постоянному току который на одном и том же сопротивлении за одно и то же время выделяет такое количество тепла, что и постоянный ток
I, U, E и т.д.
 - постоянный ток,
- постоянный ток,
 - переменный ток,
- переменный ток,

 ,.
,. 
Расчет цепей переменного тока, векторные диаграммы и измерительные приборы все используют действующие (эффективные) значения.
4) среднее значение – это значение переменной величины за полупериод
 ,
,  ,
,  .
.
Максимальное и среднее значение используется редко.
Метод векторных диаграмм
Аналитический расчет у переменного тока является относительно сложным, кроме того он не дает наглядного характера работы цепи. Поэтому чаще используют графоаналитический метод расчета цепей.
Г.-а. Метод обязательно требует построение векторных диаграмм. Векторная диаграмма – это совокупность эклектических векторов величин переменного тока изменяющегося с одинаково условной частотой. При построении в. диаграмм в начале выбирается основной вектор, который в выбранном масштабе откладывается или вертикально или горизонтально и от этого вектора строятся др. Вектора в выбранном масштабе. Масштаб выбирается таким образом, чтобы вектора были соразмеримы.
Пример.
Треб построить в. диаграмму

 ,
,  ,
, 
I-?

8-2
Внешняя характеристика U2=f(b)

 ,
, 
 .
.
U2àb - линейная зависимость.
КПД трансформатора
 , где
, где
Р1 – активная мощность в первичной обмотке
Р2 - -//- во-вторичной обмотке
ΔР= РСТ+РМ
 РСТ – потери в стали, PCT стремится к Ро и определяется по показаниям вольтметра при опыте х/х
РСТ – потери в стали, PCT стремится к Ро и определяется по показаниям вольтметра при опыте х/х
РМ - -//- в меди,  ,
,
b – коэф. Загрузки трансформатора (0-1), PK – активная мощность замеренная вольтметром в цепи при опыте к.з.
 Трехфазные трансформаторы
Трехфазные трансформаторы
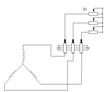
Для трансформирования энергии в трехфазных системах используют либо группу из трех однофазных трансформаторов, у которых первичные и вторичные обмотки соединяются звездой или треугольником или сразу трехфазный трансформатор который применяется чаще чем 3 однофазных.
ФА+ФВ+ФС=0 – трансформатор нормального тока, эта система 10/0,4 кВ
Соединение звезда-звезда с нулевым проводом. Используется 2 группы соединения обмоток группа 12 и группа 11

3. Усилители на транзисторах

Для работы усилителей требуется источник питания постоянного тока.
R1, R2 – делитель напряжений, подбором сопротивлений кот-го опред. рабочую точку входной хар-ки транзистора.
9-1
Сопротивления и мощности в цепях переменного тока. Треугольники напряжений, сопротивлений, мощностей.
 Мощности в цепях переменного тока различают
Мощности в цепях переменного тока различают
мгновенную мощность  ;
;
активная мощность  (кВт, Вт);
(кВт, Вт);
реактивная мощность  (ВАр, кВАр);
(ВАр, кВАр);
 полная мощность
полная мощность  (ВА, кВА).
(ВА, кВА).
Цепь переменного тока в чисто активном сопротивлении
Типичными представителями активных сопротивлений являются резисторы, лампы накаливания, электрические печи и т.д.
Индуктивностью обладают катушки реле, обмотки электродвигателей и транс-форматоров. Индуктивное сопротивление подчитывается по формуле:

где L - индуктивность.
Емкостью обладают конденсаторы, длинные линии электропередачи и т.д.
Емкостное сопротивление подсчитывается по формуле:

где С - емкость.
Реальные потребители электрической энергии могут иметь и комплексное значение сопротивлений. При наличии R и L значение суммарного сопротивления Z подсчитывается по формуле:

Аналогично ведется подсчет Z и для цепи R и С:

Потребители с R, L, C имеют суммарное сопротивление:

Треугольник мощностей и сопротивления получим ряд формул:  ,
,  ,
,  ,
,  .
.
 Из треугольника сопротивлений получим несколько формул:
Из треугольника сопротивлений получим несколько формул:

 ;
;


 аналогичные формулы и для с емкостным сопротивлением т.е ХL можно заменить на XC.
аналогичные формулы и для с емкостным сопротивлением т.е ХL можно заменить на XC.
Треугольник напряжений
 , U=IZ, UA=IR, UL=IXL, UC=IXC, UP=UL-UC,
, U=IZ, UA=IR, UL=IXL, UC=IXC, UP=UL-UC,  .
.
9-2
Основными конструктивными элементами асинхронного двигателя являются неподвижный статор и подвижный ротор.
Статор представляет собой полый цилиндр набранный из пластин – электротехнической стали. На внутреннюю поверхность которой имеются пазы где укладываются с определенным шагом или полюсным делением три фазные обмотки начало которых обозначено С1, С2, С3. Концы обмоток выносятся на плату.
Соединяются обмотки по следующим схемам:
Y D

 и UФ=220В UФ=380В
и UФ=220В UФ=380В
Число оборотов магнитного поля статора

АД могут быть двоякого исполнения: с к.з. ротором, с фазным ротором или АД с контактными кольцами. Ротор АД также имеет цилиндрический магнитопровод на внешней поверхности которого имеются пазы в которую укладываются коротко замкнутые или 3фазные обмотки соединенные по схеме звезда
 Принцип действия АД
Принцип действия АД
При подключении питания к обмоткам статора возникает вращения магнитное поле которого пересекает обмотки ротора и наводит ЭДС индукции. Так как обмотки ротора замкнуты то в них протекает Эл. Ток действия магнитного поля на проводник, с током вызывая появления сил, за счет которых и вращается ротор.
Относительная величина отставания n2 от n1 наз. скольжением S
 , n2 – число оборотов ротора.
, n2 – число оборотов ротора.
Режимы работы АД.
Если n1=n2 это идеальный режим холостого хода. В этом случае пересечения обмоток ротора с магнитным полем нет, нет и ЭДС. МВР – вращающий момент, S=0.
Если n2=0 ротор не подвижный S=1 0≤S≤1 SH=2…6% если n1=3000об/мин. то nH2=n1(1-SH)=2800 об/мин.
9-3
Стабилитроны — диоды, предназначенные для стабилизации напряжения в схеме при изменении тока, протекающего через диод. Основной параметр стабилитрона — напряжение стабилизации в рабочей точке, для которой задается дифференциальное сопротивление стабилитрона — отношение изменения напряжения стабилизации к вызвавшему его малому изменению тока стабилизации. Нормируется также дифференциальное сопротивление при минимальном токе стабилизации. Важным параметром является ТКН (температурный коэффициент напряжения стабилизации) — отношение относительного изменения напряжения к абсолютному изменению температуры окружающей среды. Значение ТКН выражается в процентах на 1° С. Стабильность работы стабилитронов характеризуется величиной дрейфа напряжения стабилизации, указывающей максимальную абсолютную величину изменения напряжения стабилизации в течение заданного времени. Нормируется также разброс напряжения стабилизации от прибора к прибору. Диод, в котором для стабилизации используется прямая ветвь ВАХ, называют стабистором. Напряжение стабилизации стабисторов составляет всего несколько десятых долей вольта. Максимальный режим работы для стабилитронов и стабисторов характеризуется максимальным током стабилизации и максимальной рассеиваемой мощностью.
Стабилитроны обозначаются  ,
,
они используют 2 характеристику диодов
 Рабочая зона стабилитрона
Рабочая зона стабилитрона 
10-1
U=Ua+Uτ+Uc
U=I*Z; Un=I*R; UL=I*XL; Uc=I*Xc;
Up=UL-Uc; X=XL-Xc
Z=(R²+X²)½=(R²+(ωL-1/ωc)²)½; Z- полное сопротивление в цепи с последовательным соединением R,L,C. При анализе режимов работы такой цепи возможны 3 случая:
1. ХL>Xc
UL>Uc
Экв-ая цепь представляет активно индуктивную нагрузку, ток отстает от напр-ия, сл-но cosφ отстающий.
2.XL<Xc;
Uc>UL.
Экв-ая цепь предст. активно-емкостное сопр-ие.
Ток опережающий.
3.UL=Uc
XL=Xc.
Режим резонанса напряжений. Экв-ая цепь с чисто активным сопротивлением
cosφ=1; R=Z. В силовых цепях этот режим является вредный и его стараются избегать.
10-2
1. S=f(M)
2. I=f(M)
3. cosj=f(M)
4. h=f(M)

Способы пуска АД
1)0.4 кВ- прямой пуск
220/380В
с КЗ ротором
Iп=(5..8)Iн
с фазным ротором
Iп=(2..3)Iн
У АД с ФР имеется пусковые сопр-ия, которые в момент пуска полностью подключаются с фазным ротором, а по мере того как двигатель набирает обороты они посл-но отключаются.
Кроме прямого пуска сущ-ет:
1. реакторный пуск;
2. автотрансформаторный,
3. пуск переключения со звезды на треугольник.

При пуске вначале включают разъединитель МВ1, МВ2. МВ1 отключается и двигатель получает питание напрямую.
10-3
Тиристор – полупроводниковый прибор с тремя и более p-n переходами, вольт-амперная характеристика которого имеет участок с отрицательным дифференциальным сопротивлением и который используется для переключения тока в нагрузке. Материалом для изготовления тиристоров служит кремний.
Динистор (двухэлектродный тиристор) – неуправляемый тиристор, имеющий два внешних вывода.
Тринистор (трехэлектродный тиристор) – управляемый тиристор, имеющий три внешних вывода. Структура тиристора состоит из четырех областей монокристалла полупроводника с чередующимся типом электропроводности.
Вольт-амперная хар-ка тиристора
Основной областью применения тиристоров является управление мощностью как переменного, так и постоянного тока, передаваемой от источника в нагрузку, а также в управляемых выпрямителях.