| |||
 | |||
относительно мало, след-но сопр-ие шунтирующего резистора должно быть также малым. пределя регулир-ия угл. скорости двигателя обычно не превышают 2/1 при условии постоянства мощности нагрузки. стабильность угл.скорости достаточно высокая. Плавное регулир-ие получить трудно из-за большого тока обмотки возбуждения, поэтому обычно использ. ступенчатое регулирование.

19. Механическая характеристика АД. Формула Клосса. Асинхронный короткозамкнутый электродвигатель и АД с фазным ротором широко распространены в электроприводе благодаря большому ресурсу безотказной работы, высоким показателям в работе, хорошим регулировочным св-вам. Для вывода Ур-ия мех. хар-ки АД воспользуемся упрощенной схемой замещения:
|
В соответствии со схемой замещения, роторный ток I2 ’ имеет значение  .(5,1) Из этого следует, что роторный ток I2’ зависит от скольжения s, т.е. от частоты вращения ротора машины, поскольку
.(5,1) Из этого следует, что роторный ток I2’ зависит от скольжения s, т.е. от частоты вращения ротора машины, поскольку  Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0), а при частоте вращения w=w0 идеального х. х. скольжение равно s = 0. Из соотношения (5.1) следует также, что при пуске роторный ток достигает максимального значения I2к’@ (8¸10)Iном, и его следует ограничивать.
Заметим, что при пуске скольжение s = 1 (текущее значение частоты вращения w = 0), а при частоте вращения w=w0 идеального х. х. скольжение равно s = 0. Из соотношения (5.1) следует также, что при пуске роторный ток достигает максимального значения I2к’@ (8¸10)Iном, и его следует ограничивать.
Мощность Р1, потребляемая АД из сети, расходуется на покрытие потерь в контуре намагничивания ∆Рm и в обмотке статора ∆Р1, и остаток ее преобразуется в электромагнитную мощность РЭ которая равна  . (5.3)В свою очередь,
. (5.3)В свою очередь,  , и, решая совместно (5.1) и (5.3), находим значение электромагн. момента
, и, решая совместно (5.1) и (5.3), находим значение электромагн. момента  . (5.4). Зависимость (5.4) является описанием мех. хар-ки АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:
. (5.4). Зависимость (5.4) является описанием мех. хар-ки АД и представляет сложную зависимость момента АД от скольжения. Исследуем ее на экстремум, взяв производную и приравняв ее нулю:  .Зависимость (5.4) имеет максимум при критическом значении скольжения, равном
.Зависимость (5.4) имеет максимум при критическом значении скольжения, равном  (5.5) и критическом (максимальном) моменте
(5.5) и критическом (максимальном) моменте  (5.6).
(5.6).

|
|
 , где
, где  . Мк- макс. момент двигателя, Sк – критич. скольжение. Хаар-ные точки хар-ки.
1- s=0; М=0, при этом скорость двигателя равна синхронной; 2- s=sном, М=Мном – ном. режим работы двигателя;3- s = sк, М = Мкр.Д – макс.момент в двигательном режиме; 4- s = 1, М = Мп - начальный пусковой момент;
5- s = -sк, М = Мкр.Г – макс. момент в генераторном режиме.
. Мк- макс. момент двигателя, Sк – критич. скольжение. Хаар-ные точки хар-ки.
1- s=0; М=0, при этом скорость двигателя равна синхронной; 2- s=sном, М=Мном – ном. режим работы двигателя;3- s = sк, М = Мкр.Д – макс.момент в двигательном режиме; 4- s = 1, М = Мп - начальный пусковой момент;
5- s = -sк, М = Мкр.Г – макс. момент в генераторном режиме.
 20. Искусствен. мех. хар-ки АД при изменении сопротивления роторной цепи. Введение резисторов в цепь ротора позволяет регулировать угл. скорость АД. Плавность регулирования зависит от числа ступеней включаемых резисторов и осущ. вниз от основной угловой скорости. Если проанализировать выражения
20. Искусствен. мех. хар-ки АД при изменении сопротивления роторной цепи. Введение резисторов в цепь ротора позволяет регулировать угл. скорость АД. Плавность регулирования зависит от числа ступеней включаемых резисторов и осущ. вниз от основной угловой скорости. Если проанализировать выражения  и
и  , то получим что с увеличением роторного сопротивления, которое становится равным (r2’ + Rдоб), увеличивается критическое скольжение Sк,
, то получим что с увеличением роторного сопротивления, которое становится равным (r2’ + Rдоб), увеличивается критическое скольжение Sк,
но величина критического момента двигателя Mкр.д остается без изменения.Мех.
хар-ки приведены на рисунке 5,6. Реостатные хар-ки АД отлич. невысокой жесткостью и уменьшаются с ростом сопр-ия резисторов роторной цепи. Метод используется для запуска машины, когда на время пуска в роторную цепь включается значительное по величине Rдоб. Введение активно – индуктивных сопротивлений в роторную цепь машины используется для поддержания большего постоянства пускового момента машины по сравнению с естественной характеристикой машины – механическая характеристика машины в области скольжений 1<s<sк представляется более плавной кривой. Критический момент машины Mкр.д и критическое скольжение sк машины изменяются в соответствии с соотношениями  и
и  .
.
 21. Искусствен. мех. хар-ки АД при изменении сопротивления статорной цепи. Произведем анализ на основе выражений
21. Искусствен. мех. хар-ки АД при изменении сопротивления статорной цепи. Произведем анализ на основе выражений  и
и  как будет изменяться угловая скорость АД при изменении сопр-ия статорной цепи. Допустим, что статорное сопр-ие увеличилось до значения r1 + Rдоб, тогда уменьшится критическое скольжение Sк и критический момент двигателя Mкр.д. Искусственные характеристики рис. 4.8, б мало пригодны для регулирования скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R1Д снижаются; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко. Этот способ обычно используется для ограничения токов и моментов АД с короткозамкнутым ротором в различных переходных процессах — при пуске, реверсе и торможении. Например, такая схема применяется в электроприводе лифтов, имеющем двухскоростной АД. В таких электроприводах при переходе с высокой скорости на пониженную в цепь низкоскоростной обмотки статора вводится добавочный резистор, который обеспечивает ограничение тока и момента АД.
как будет изменяться угловая скорость АД при изменении сопр-ия статорной цепи. Допустим, что статорное сопр-ие увеличилось до значения r1 + Rдоб, тогда уменьшится критическое скольжение Sк и критический момент двигателя Mкр.д. Искусственные характеристики рис. 4.8, б мало пригодны для регулирования скорости АД: они обеспечивают небольшой диапазон изменения скорости; жесткость характеристик АД и его перегрузочная способность, характеризуемая критическим моментом, по мере увеличения R1Д снижаются; способ отличает и низкая экономичность. В силу этих недостатков регулирование скорости АД с помощью активных резисторов в цепи его статора применяется редко. Этот способ обычно используется для ограничения токов и моментов АД с короткозамкнутым ротором в различных переходных процессах — при пуске, реверсе и торможении. Например, такая схема применяется в электроприводе лифтов, имеющем двухскоростной АД. В таких электроприводах при переходе с высокой скорости на пониженную в цепь низкоскоростной обмотки статора вводится добавочный резистор, который обеспечивает ограничение тока и момента АД.
22. Искусствен. мех. хар-ки АД при изменении напряжения питания статора. Проведем анализ, как влияет изменение подводимого к двигателю напряжения на угл. скорость АД. Исходя из выражений  и
и  можно сделать вывод, что критическое скольжение sк остается постоянным при понижении напряжения, а критический момент Mкр.д уменьшается пропорционально квадрату питающего напряжения.
можно сделать вывод, что критическое скольжение sк остается постоянным при понижении напряжения, а критический момент Mкр.д уменьшается пропорционально квадрату питающего напряжения.
|
 23. Режимы торможения АД. Рекуперативное торможение АД. Рекуперативное торможение осуществляется при вращении ротора активным моментом со скоростью ω>ω0 (рисунок 6.1). Этот же режим будет иметь место, если при вращении ротора со скоростью ω уменьшить частоту вращения поля статора ω0 (участок характеристики bc на рисунке 6.2). Роль активного момента здесь будет выполнять момент инерционных сил вращающегося ротора.
23. Режимы торможения АД. Рекуперативное торможение АД. Рекуперативное торможение осуществляется при вращении ротора активным моментом со скоростью ω>ω0 (рисунок 6.1). Этот же режим будет иметь место, если при вращении ротора со скоростью ω уменьшить частоту вращения поля статора ω0 (участок характеристики bc на рисунке 6.2). Роль активного момента здесь будет выполнять момент инерционных сил вращающегося ротора.

В
первом квадранте АД работает в режиме двигателя, по мере приближения скорости двигателя к скорости идеального х.х.(синхронной) момент двигателя приближается к 0. На участок b-c хар-ка переходит при дальнейшем увеличении угловой скорости, на этом участке двигатель работает в режиме рекуперативного торможения (генераторный режим). т.е. отдает энергию в сеть. Данный способ торможения применяется для двигателей с переключением полюсов, для приводов грузоподъемных машин и др.
 24. Режимы торможения АД. Электродинамическое торможение АД. осущ. обычно включением обмотки статора на сеть пост. тока, обмотка ротора при этом замыкается на внешние резисторы. Они предусмотрены для ограничения тока и получения различных тормозных характеристик. Этот режим применяется в ряде случаев, когда после отключения АД от сети требуется быстрая остановка без реверса. Постоянный ток, подводимый к обмотке статора, образует неподвижное в пространстве поле. При вращении ротора в его обмотке наводится переменная ЭДС, под действием которой протекает переменный ток. Этот ток создает также неподвижное поле. Складываясь, поля статора и ротора образуют результирующее поле, в результате взаимодействия с которым тока ротора возникает тормозной момент. Энергия, поступающая с вала двигателя, рассеивается при этом в сопротивлениях роторной цепи. Величина намагничивающей силы (НС) поля статора зависит от схемы соединения обмотки статора и величины постоянного тока. Наиболее распространены две схемы питания цепи статора постоянным током, показанные на рисунке 6.6.
24. Режимы торможения АД. Электродинамическое торможение АД. осущ. обычно включением обмотки статора на сеть пост. тока, обмотка ротора при этом замыкается на внешние резисторы. Они предусмотрены для ограничения тока и получения различных тормозных характеристик. Этот режим применяется в ряде случаев, когда после отключения АД от сети требуется быстрая остановка без реверса. Постоянный ток, подводимый к обмотке статора, образует неподвижное в пространстве поле. При вращении ротора в его обмотке наводится переменная ЭДС, под действием которой протекает переменный ток. Этот ток создает также неподвижное поле. Складываясь, поля статора и ротора образуют результирующее поле, в результате взаимодействия с которым тока ротора возникает тормозной момент. Энергия, поступающая с вала двигателя, рассеивается при этом в сопротивлениях роторной цепи. Величина намагничивающей силы (НС) поля статора зависит от схемы соединения обмотки статора и величины постоянного тока. Наиболее распространены две схемы питания цепи статора постоянным током, показанные на рисунке 6.6.

|

 Мех-ая характеристика для схемы «звезда» представлена на рис. 6.7 (а), для схемы треугольник»
Мех-ая характеристика для схемы «звезда» представлена на рис. 6.7 (а), для схемы треугольник»  (звезда),
(звезда),  (треугольник).
(треугольник).
|
25. Режимы торможения АД. Торможение АД противовключением. Этот режим имеет значит. большое применение на практике.Он может быть получен при движущем моменте нагрузки Мс>Ми. Для осуществления торможения противовключением необходимо поменять местами две любые фазы статора. При этом меняется направление вращения поля, машина тормозится в режиме противовключения, а затем реверсируется. (рис.)

|

26. Регулирование координат электропривода. Основные показатели регулирования В качестве регулируемых координат электропривода рассматриваются скорость, момент (ток двигателя), положение рабочего органа.
Основные показатели регулирования Точность регулирования координат определяется возможными отклонениями ее от заданного значения под действиями возмущающих факторов, например изменений нагрузки при регулировании скорости, изменений скорости при регулировании момента двигателя, колебаний напряжения сети и т.д. Диапазон регулирования характеризует пределы изменения значений переменной, возможные при данном способе регулирования:
 Плавность регулирования характеризует число дискретных значений регулируемого параметра, реализуемых при данном способе регулирования в диапазоне регулирования. Оценивается коэффициентом плавности
Плавность регулирования характеризует число дискретных значений регулируемого параметра, реализуемых при данном способе регулирования в диапазоне регулирования. Оценивается коэффициентом плавности  Экономичность при внедрении регулируемого электропривода определяется технико – экономическими расчетами (сопровождается бизнес – планами), учитывающими затраты и эксплуатационные расходы, которые должны окупаться повышением производительности и надежности оборудования и качества продукции. Динамические параметры регулирования (рисунок 7.1):
Экономичность при внедрении регулируемого электропривода определяется технико – экономическими расчетами (сопровождается бизнес – планами), учитывающими затраты и эксплуатационные расходы, которые должны окупаться повышением производительности и надежности оборудования и качества продукции. Динамические параметры регулирования (рисунок 7.1):
|
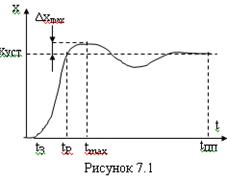
- tПП – общее время переходного процесса, за которое затухают все его свободные составляющие. b) Перерегулирование – динамическая ошибка – максимальное отклонение от xУСТ  .
.