Из уравнения:  вытекает, что возможны три принципиально различные способа регулирования угловой скорости двигателя:
вытекает, что возможны три принципиально различные способа регулирования угловой скорости двигателя:
1) изменением тока возбуждения (магнитного потока) двигателя; 2) изменением сопротивления цепи якоря посредство резисторов (реостатное);
|
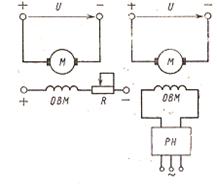
двигателя, поэтому этот способ находит широкое применение в современной практике электропривода. Принципиальные схемы электропривода при регулировании тока возбуждения показаны на рис. Ток возбуждения регулируется или с помощью резистора в случае двигателей малой мощности, или посредством регулятора напряжения РН. Регулирование скорости в этом случае осуществляется вверх от основной, причем допустимый момент двигателя изменяется по закону гиперболы, а допустимая мощность остается неизменной. Так как допустимая нагрузка определяется током, равным номинальному, то мощность, развиваемая двигателем, постоянна (Р = Р НОМ = const) независимо от магнитного потока (тока возбуждения). Электромеханическим характеристикам w= f (I) при изменении тока возбуждения соответствуют различные значения угловой скорости идеального холостого хода, определяемые:  На рис. по оси ординат отложено значение угловой скорости идеального холостого хода
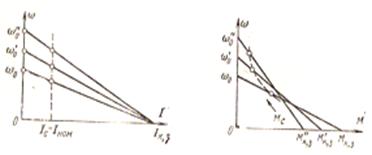
На рис. по оси ординат отложено значение угловой скорости идеального холостого хода  для естественной характеристики, когда по ток Ф = ФНОМ. Значения угловых скоростей идеального холостого хода при ослабленном потоке
для естественной характеристики, когда по ток Ф = ФНОМ. Значения угловых скоростей идеального холостого хода при ослабленном потоке  и
и  лежат, очевидно, выше
лежат, очевидно, выше  . Все электромеханические характеристики пересекаются с осью абсцисс в одной точке. Последнее следует из того, что при w=О уравнение для любой электромеханической характеристики имеет вид:
. Все электромеханические характеристики пересекаются с осью абсцисс в одной точке. Последнее следует из того, что при w=О уравнение для любой электромеханической характеристики имеет вид:  , откуда определяется ток в якоре двигателя
, откуда определяется ток в якоре двигателя  Следовательно, при различных токах возбуждения и при угловой скорости двигателя, равной нулю, ток в якорной цепи равен току короткого замыкания двигателя. Этим значением тока и определяется общая точка пересечения электромеханических характеристик.
Следовательно, при различных токах возбуждения и при угловой скорости двигателя, равной нулю, ток в якорной цепи равен току короткого замыкания двигателя. Этим значением тока и определяется общая точка пересечения электромеханических характеристик.
Механические характеристики, показанные на рис., имеют те же значения угловых скоростей идеального холостого хода, что и для электромеханических характеристик. Однако эти характеристики не пересекаются в одной точке на оси абсцисс, так как по мере уменьшения потока уменьшается и момент короткого замыкания, определяемый по формуле 
|
I точки, находящиеся на линии номинального тока  этому соответствуют точки, лежащие на гиперболической кривой момента сопротивления Мс, как это показано пунктиром на рис. При этом потери мощности в цепи якоря при работе на регулировочных характеристиках будут такими же, как и на естественной характеристике, а потери на возбуждение - меньше. При работе на угловых скоростях, соответствующих точкам, лежащим левее указанной кривой момента Мс, двигатель будет недогружен: напротив, работа на скоростях правее этой кривой приведет к перегрузке двигателя. Любопытно отметить, что при малых моментах нагрузки угловая скорость с ослаблением поля растет, а при больших уменьшается.
этому соответствуют точки, лежащие на гиперболической кривой момента сопротивления Мс, как это показано пунктиром на рис. При этом потери мощности в цепи якоря при работе на регулировочных характеристиках будут такими же, как и на естественной характеристике, а потери на возбуждение - меньше. При работе на угловых скоростях, соответствующих точкам, лежащим левее указанной кривой момента Мс, двигатель будет недогружен: напротив, работа на скоростях правее этой кривой приведет к перегрузке двигателя. Любопытно отметить, что при малых моментах нагрузки угловая скорость с ослаблением поля растет, а при больших уменьшается.