Лабораторная работа №3
14 – вариант
Задание: Система включает в себя двигатель постоянного тока, регулятор, датчик скорости вращения и управляющее устройство. Необходимо промоделировать переходные процессы в системе при различной структуре и разных параметрах регулятора, входящего в состав управляющего устройства.
Ход выполнения работы:
Функциональная схема системы управления изображена на рис.1.
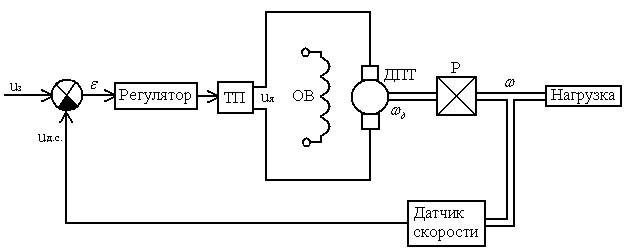
Рис.1
 – задающий сигнал, пропорциональный требуемой скорости вращения;
– задающий сигнал, пропорциональный требуемой скорости вращения;
 – сигнал на выходе датчика скорости;
– сигнал на выходе датчика скорости;
 – ошибка управления;
– ошибка управления;
 – напряжение, подаваемое на обмотку якоря;
– напряжение, подаваемое на обмотку якоря;
 – частота вращения ротора двигателя;
– частота вращения ротора двигателя;
 – частота, с которой электропривод вращает нагрузку (управляемая величина);
– частота, с которой электропривод вращает нагрузку (управляемая величина);
ТП – транзисторный преобразователь;
ОВ – обмотка возбуждения;
ДПТ – двигатель постоянного тока (ПБВ – 132 МГ);
Р – редуктор.
Запишем уравнения процессов, протекающих в системе.
 (1)
(1)
 , где
, где  – коэффициент передачи датчика скорости.
– коэффициент передачи датчика скорости.
 , где
, где  – требуемая частота вращения.
– требуемая частота вращения.
 (2)
(2)
Преобразуем (2) по Лапласу:
 (3)
(3)
Обозначим:
 – передаточная функция регулятора.
– передаточная функция регулятора.
ТП будем рассматривать как пропорциональное звено с коэффициентом передачи  .
.
Тогда, напряжение, подаваемое на обмотку якоря, будет определяться следующим операторным уравнением:
 (4)
(4)
Динамика ДПТ описывается следующим операторным уравнением:
 , (5)
, (5)
где  – момент сопротивления, приложенный к валу двигателя.
– момент сопротивления, приложенный к валу двигателя.
 – передаточная функция ДПТ по управляющему напряжению.
– передаточная функция ДПТ по управляющему напряжению.
 – передаточная функция ДПТ по моменту сопротивления.
– передаточная функция ДПТ по моменту сопротивления.
 – коэффициент передачи ДПТ по управляющему напряжению.
– коэффициент передачи ДПТ по управляющему напряжению.
 .
.  – коэффициент противо-ЭДС.
– коэффициент противо-ЭДС.
 – коэффициент передачи ДПТ по моменту сопротивления.
– коэффициент передачи ДПТ по моменту сопротивления.  – коэффициент момента ДПТ,
– коэффициент момента ДПТ,  – активное сопротивление обмотки якоря.
– активное сопротивление обмотки якоря.
 – электромагнитная постоянная времени ДПТ.
– электромагнитная постоянная времени ДПТ.  – индуктивность обмотки якоря.
– индуктивность обмотки якоря.
 – электромеханическая постоянная времени ДПТ.
– электромеханическая постоянная времени ДПТ.
 – суммарный момент инерции, приведённый к валу ДПТ.
– суммарный момент инерции, приведённый к валу ДПТ.
 – момент инерции ротора ДПТ.
– момент инерции ротора ДПТ.
 – момент инерции редуктора, приведённый к валу ДПТ.
– момент инерции редуктора, приведённый к валу ДПТ.
 – момент инерции нагрузки.
– момент инерции нагрузки.
 – передаточное число редуктора.
– передаточное число редуктора.
Угловая скорость нагрузки:  (6)
(6)
 (7)
(7)
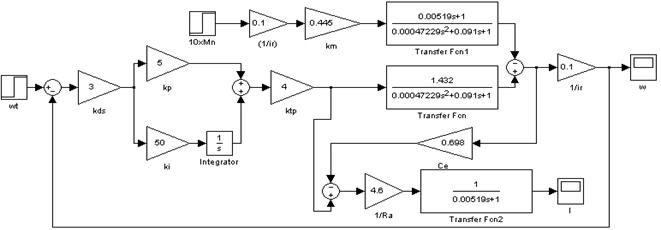
На основе уравнений (3) – (7) формируем динамическую структурную схему системы управления (рис. 2).
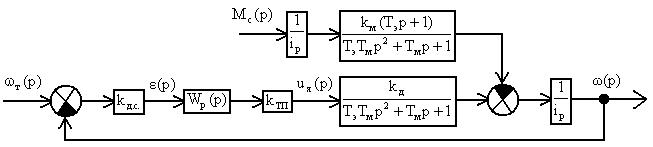
Рис. 2.
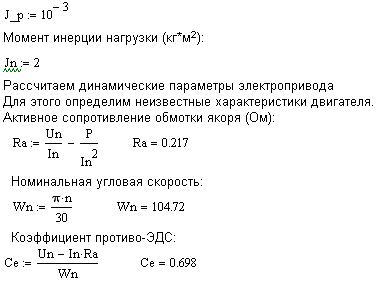
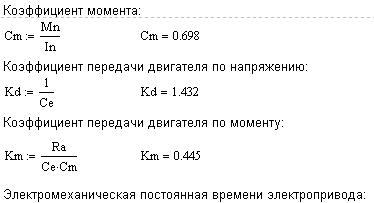
Исходные данные:
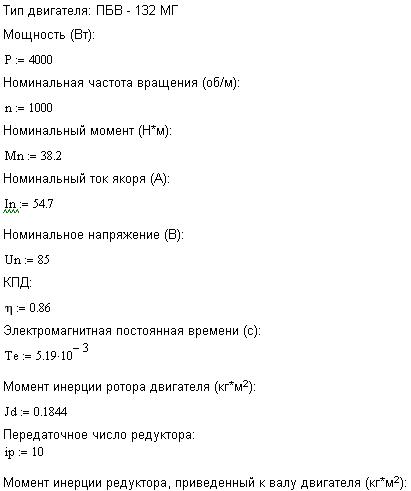
Структурная схема:
А) П-регулятор.
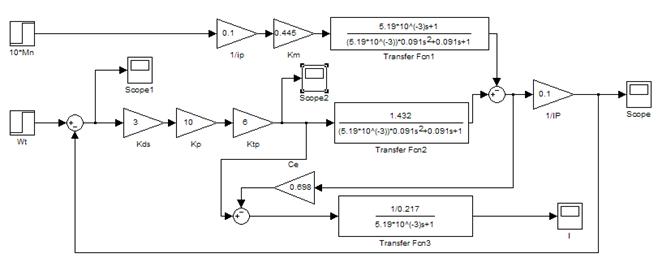
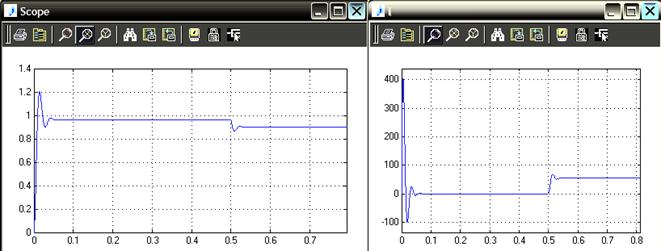
Видим основной недостаток этого вида регулятора – большое перерегулирование. При увеличении Кп будет возрастать перерегулирование, но будет уменьшаться статическая ошибка.
Б) И-регулятор.
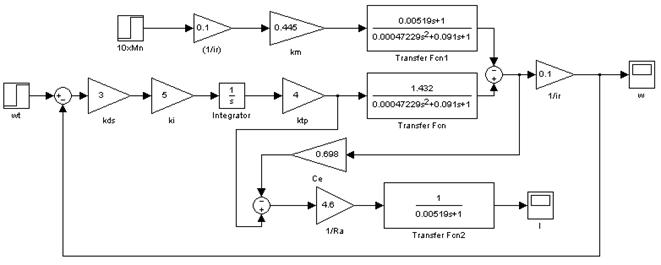
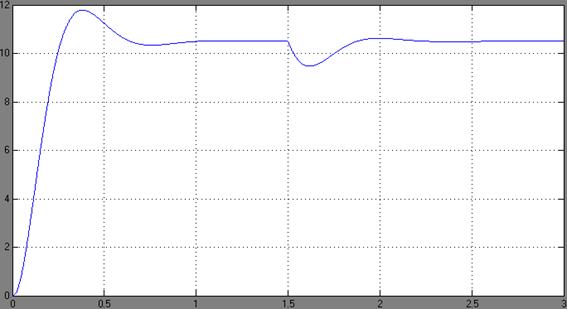
Видим основной недостаток этого вида регулятора – низкое быстродействие. При увеличении Ки будет повышаться быстродействие, возрастать перерегулирование и колебательность. Система становится астатической.
В) ПИ-регулятор.
Как видно, преимущества П- и И-регулятора объединились: хорошее быстродействие, малая колебательность, нет статической ошибки.
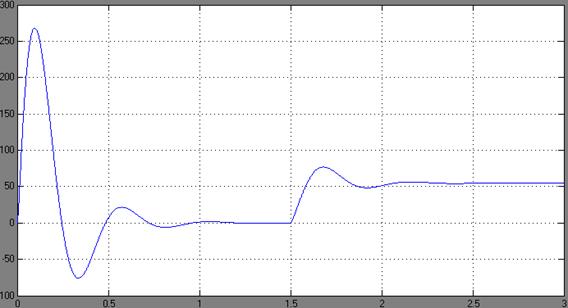
Г) ПИД-регулятор.
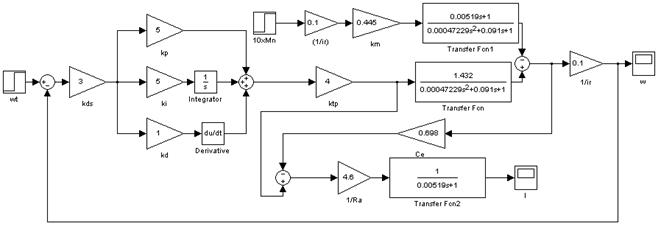

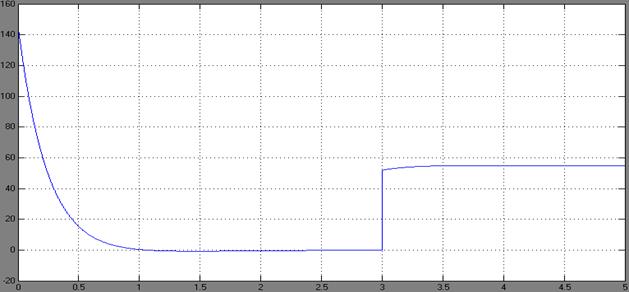
Объединение достоинств всех типов регуляторов: хорошее быстродействие, отсутствие колебательности и статической ошибки, малое перерегулирование. При увеличении коэффициентов регулятора возрастёт колебательность, перерегулирование, а также быстродействие.
Вывод: В ходе данной лабораторной работы была составлена модель системы, включающей в себя двигатель постоянного тока, регулятор, датчик скорости вращения и управляющее устройство. Были промоделированы переходные процессы в системе при различной структуре и разных параметрах регулятора, входящего в состав управляющего устройства.