БАЗОВЫЕ ПСЕВДОСЛУЧАЙНЫЕ ЧИСЛА
КОНСТРУИРОВАНИЕ СЛУЧАЙНЫХ ЯВЛЕНИЙ В ИМ
Модели случайных явлений являются важной частью имитационных моделей.
Имитационные модели представляют собой мощный класс математических моделей, в которых процесс функционирования моделируемой системы отображается с сохранением логической структуры и последовательности протекания во времени.
Основным способом конструирования моделей случайных явлений является разработка их программных датчиков.
Достоинства:
Обеспечивается возможность управления процессом имитации (в частности, повторять реализации одних и тех же последовательностей, моделировать параллельно несколько независимых базовых псевдослучайных потоков).
Недостатки:
— программные датчики реализуются с помощью детерминированных алгоритмов, и поэтому формируемые с помощью них явления фактически не являются случайными: случайность лишь имитируется (отсюда название таких явлений – псевдослучайные).
Возникает проблема обеспечения высокого качества такой имитации (это приводит к необходимости контролировать качество имитации с помощью целого ряда статистических тестов);
— конструирование достаточно сложных случайных явлений (например, многомерных процессов) требует реализации весьма сложных в вычислительном отношении алгоритмов, что приводит к существенному увеличению вычислительной сложности ИМ.
Последовательность базовых чисел и производные случайные явления
Формирование реализаций случайных явлений любой сложности осуществляется в ИМ на основе следующей двухуровневой схемы:
— первый уровень — формирование базовой псевдослучайной последовательности: последовательности независимых равномерно распределенных чисел на отрезке [0,1]. В этих числах случайность, независимость и равномерность распределения лишь имитируются;
— второй уровень – функционально‑алгоритмическое преобразование базовых чисел в реализации случайных явлений с заданными статистическими характеристиками.
При таком подходе качество моделируемых случайных явлений практически полностью определяется качеством генераторов базовых псевдослучайных чисел (БПЧ).
Физический датчик базовых чисел
Рассмотрение физического датчика базовых чисел не имеет самостоятельного значения для разработки компьютерных ИМ в связи с указанными выше недостатками физического способа моделирования случайных явлений, но имеет существенное значение для понимания процесса функционирования программных датчиков базовых псевдослучайных чисел (БПЧ).
Предположим, что существует источник высокочастотного стационарного процесса b(t) с произвольным знаком распределения амплитуды, удовлетворяющим следующим двум нежестким условиям:
— плотность распределения f (b) — гладкая функция,
— на концах области определения b значения функции f (b) являются нулевыми.
Через некоторый интервал времени D t осуществляется съем значений этого процесса. Интервал времени D t выбирается таким, чтобы получаемые значения процесса b(t) были бы независимыми, а точнее некоррелированными. Для этого необходимо оценить период затухания автокорреляционной функции процесса b(t) и выбрать D t больше этого периода. Очевидно, чем более высокочастотным является процесс b(t), тем при меньших значениях D t обеспечивается некоррелированность, тем большую производительность будет иметь датчик.
Значения b пропускаются через схему квантования, а потом нормируются.
Структурная схема физического датчика приведена на рис.3.1 с использованием следующих обозначений:
x – базовая последовательность равномерно распределенных чисел на интервале [0,1];
D– шаг квантования;
d – случайная величина на выходе схемы квантования d  [0, D].
[0, D].
Рис.3.1
Рис.3.2 поясняет механизм работы физического датчика базовых чисел.
Определим плотность распределения случайной величины d. Используя известное из теории вероятностей соотношение для плотности распределения величины, являющейся кусочно‑монотонной функцией от случайного аргумента (в данном случае d(b), можно записать:
 , (3.1)
, (3.1)
где Y i (d) – функция, обратная по отношению к функции d (b) на i ‑ом участке монотонности:
b = Y i (d) = D(i ‑1) + d; (3.2)
I – множество тех участков монотонности, на которых существует обратная функция Y i (d) (в данном случае I =1,2…, n).
Так как производная Y i `(d) = 1, то
 , (3.3)
, (3.3)
где  .
.
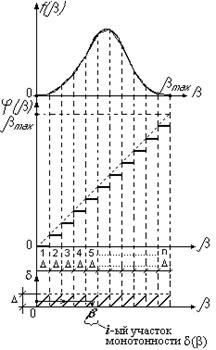
Рис.3.2
Так как функция f (b) гладкая, то при достаточно малом шаге квантования D можно достаточно точно аппроксимировать ее кусочно‑линейной зависимостью. С учетом этого на основе предыдущего соотношения можно утверждать, что функция w(d) с достаточной степенью точности является линейной на отрезке [0, D] как суперпозиция линейных функций. Для уточнения характера этой функции вычислим значения на концах интервала:
w(0) = f (0) + f (D) + f (2D) +... + f ((n –1)D), (3.4)
w(D) = f (D) + f (2D) +... + f (D(n –1)) + f (n D). (3.5)
Сравнивая оба значения и учитывая, что по исходному предположению значения функции f (b) в граничных точках области определения b нулевые (f (0)= f (n D)=0), получаем равенство w(0)=w(D). При линейном характере функции w(d) это говорит о том, что она определяет закон равной плотности вероятности. После преобразования‑нормировки на выходе физического датчика получаются базовые числа.