Силовые (мощность и вращающий момент) и кинематические (частота вращения и угловая скорость) параметры привода рассчитывают на валах из требуемой (расчетной)мощности двигателя Рдв и его номинальной частоты вращения nном при установившемся режиме.
3.1 Определить мощность на ведущем валу редуктора по формуле:
Р1 = Рдв ∙ ηоп ∙ ηпк (кВт)
3.2 Определить мощность на ведомом валу редуктора по формуле:
Р2 = Р1 ∙ ηзп ∙ ηпк (кВт)
3.3 Определить мощность на валу рабочей машины по формуле:
Ррм = Р2 ∙ ηм ∙ ηпс (кВт)
3.4 Определить угловую скорость вала двигателя по формуле:
ωном = π ∙ nном ∕ 30 (рад/с)
3.5 Определить частоту вращения и угловую скорость ведущего вала редуктора по
формулам:
n1 = nном ∕ uоп ф (об/мин), ω1 = ωном ∕ uоп ф (рад/с)
3.6 Определить частоту вращения и угловую скорость ведомого вала редуктора по
формулам:
n2 = n1 ∕ uзп (об/мин), ω2 = ω1 ∕ uзп (рад/с)
3.7 Частота вращения и угловая скорость вала рабочей машины:
nрм = n2 , ωрм = ω2
3.8 Определить значение вращающего момента на валу двигателя по формуле:
Тдв = Рдв ∙ 103 ∕ ωном (Нм), где Рдв кВт
3.9 Определить значение вращающего момента на ведущем валу редуктора по формуле:
Т1 = Тдв ∙uоп ∙ ηоп ∙ ηпк (Нм)
3.10 Определить значение вращающего момента на ведомом валу редуктора по формуле:
Т2 = Т1 ∙uзп ∙ ηзп ∙ ηпк (Нм)
3.11 Определить значение вращающего момента на валу рабочей машины по формуле:
Трм = Т2 ∙ ηм ∙ ηпс (Нм)
Задача №2
Расчет клиноременной и поликлиноременной передач
Цель: формирование практических навыков в расчете открытой ременной передачи и в выполнении проверочного расчета.
Теоретические основы
Ременные передачи относятся к категории быстроходных передач, и поэтому в проектируемых приводах они приняты первой ступенью. Исходными данными для расчета ременных передач являются номинальная мощность Рном и номинальная частота вращения nном двигателя (см. задачу №1) или условия долговечности ремня.
В зависимости от заданного варианта технического задания, в задаче конструируются ременные передачи открытого типа (оси валов параллельны, вращение шкивов в одном направлении) с прорезиненными ремнями клинового и поликлинового сечений (первое сечение – трапециевидное, второе – пилообразное).
Клиновые ремни, из-за их расклинивающего действия на шкив прижимаются рабочими поверхностями к ручью шкива примерно в 3 раза сильнее, чем плоский ремень при том же натяжении. Этим обуславливается их повышенная несущая способность, малые габариты и углы обхвата по сравнению с плоскими ремнями. В настоящее время такие ремни имеют преимущественное применение в машиностроении.
Расчет ременных передач проводится в два этапа: первый - проектный расчет с целью определения геометрических параметров передачи; второй – проверочный расчет ремней на прочность.
Проектный расчет
1.1 Выбрать сечение ремня.
Тип проектируемой ременной передачи предусмотрен техническим заданием. Выбор сечения ремня произвести по номограмме (см. Рис.1,2) в зависимости от мощности, передаваемой ведущим шкивом, Р1 = Рном, кВт (где Рном – номинальная мощность двигателя) и его частоты вращения n1 = nном, об/ мин (где nном – номинальная частота вращения вала двигателя
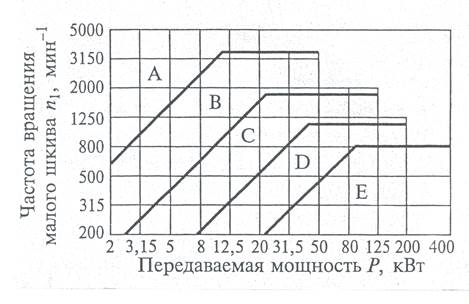
Рис.1 График для выбора сечения клинового ремня нормального сечения.

Рис.2 График для выбора сечения поликлинового ремня.
Значения Рном и nном взять из задачи №1.
Примечание. Клиновые ремни нормального сечения Z(О) можно применять только для передачи мощностью до 2 кВт.
1.2 Определить минимально допустимый диаметр ведущего шкива d  в зависимости от вращающего момента на валу двигателя Тдв,Нм, и выбранного сечения ремня по таблице 1.
в зависимости от вращающего момента на валу двигателя Тдв,Нм, и выбранного сечения ремня по таблице 1.
Таблица 1.
| Обозначение сечения ремня | Нормального сечения | Поликлиновые | ||||||
| Z(0) | A | В | С | D | К | Л | М | |
| Вращающий момент на ведущем валу, Нм | <30 | 15…60 | 50…150 | 120…550 | 450…2000 | <40 | 18…400 | >130 |
Минимальный диаметр ведущего шкива d  , мм , мм
|
1.3 Задаться расчетным диаметром ведущего шкива d  , взяв на 1…2 порядка выше значение d
, взяв на 1…2 порядка выше значение d  из стандартного ряда: 63,71, 80, 90, 100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 355, 400 … мм. Эта рекомендация дана в целях повышения срока службы ремней.
из стандартного ряда: 63,71, 80, 90, 100, 112, 125, 140, 160, 180, 200, 224, 250, 280, 315, 355, 400 … мм. Эта рекомендация дана в целях повышения срока службы ремней.
1.4 Определить диаметр ведомого шкива d  , мм, по формуле:
, мм, по формуле:
 ,
,
где uоп ф = фактическое передаточное число ременной передачи (значение взять из задачи №1),  = 0,01…0,02 – коэффициент скольжения.
= 0,01…0,02 – коэффициент скольжения.
Полученное значение  округлить до ближайшего стандартного из выше указанного ряда.
округлить до ближайшего стандартного из выше указанного ряда.
1.5 Определить фактическое передаточное число ременной передачи по диаметрам шкивов и проверить его отклонение  Δu от ранее полученного значения u
Δu от ранее полученного значения u  по
по
формулам:
 ;
;
Δu= 
1.6 Определить ориентировочное межосевое расстояние a, мм, по формуле:
a 
где h-высота сечения клинового (H – поликлинового) ремня (см. рис. 3). Значения h (H) взять из таблицы 2.

Клиновое сечение Поликлиновеое сечение
Рис.3
Таблица 2.
| Основные размеры, мм | Обозначение сечения ремня | |||||||
| Нормальное сечение по ГОСТ 1284-80 | Поликлиновое сечение по РТМ 38-40528-74 | |||||||
| Z(О) | А | В | С | D | К | Л | М | |
| h | 10,5 | 2,35 | 4,85 | 10,35 | ||||
| H | - | - | - | - | - | 9,5 | 16,7 | |
| p | - | - | - | - | - | 2,4 | 4,8 | 9,5 |
Площадь сечения А, мм 
| А=0,5 b(2H-h), где b-ширина ремня, зависящая от числа клиньев z и размера р |
1.7 Определить расчетную длину ремня L, мм по формуле:
L = 2a + 0,5π ( ) + 0,25 (
) + 0,25 ( a
a
Полученное значение L округлить до ближайшего стандартного из ряда: L = 400; 450; 500; 560; 630; 710; 800; 900; 1000; 1120; 1250; 1400; 1600; 1800; 2000; 2240; 2500; 2800; 3150; 3550; 4000; 4500; … мм.
1.8 Определить уточненное значение межосевого расстояния a по формулам:
a = 0,125{2L-π( ) +
) +  }, мм
}, мм
Примечание. При монтаже передачи необходимо обеспечивать возможность уменьшения a на 0,01L для того, чтобы облегчить надевание ремня на шкив; для увеличения натяжения ремней необходимо предусмотреть возможность увеличения a на 0,025L.
1.9 Определить угол обхвата на ведущем шкиве α , град, по формуле:
α = 180  - 57 (d2-d1) / а
- 57 (d2-d1) / а
Угол α для передач клиновым и поликлиновым ремнем должен быть  .
.
1.10 Определить скорость ремня V, м/с, по формуле:
V = π  /
/  [V]
[V]
где d и n - соответственно диаметр ведущего шкива, мм, и его частота вращения, об/мин; [V]- допускаемая скорость, м/с;
[V]- 25 м/с – для клиновых ремней;
[V]- 40 м/с для поликлиновых ремней.
1.11Определить частоту пробегов ремня Π в секунду:
П= V/L  [П],
[П],
где [П]- допускаемая частота пробегов; [П]= 15… 20 с  - для клиновых,
- для клиновых,
[П]= 30 с - для поликлиновых ремней, что обеспечивает среднюю долговечность ремня в пределах 2000 … 3000 ч.
Примечание. Если частота пробегов П >[П], то выбирают бо׳льшую длину ремня L из вышеприведенного ряда и находят новое значение межосевого расстояния a (см.п.8).
1.12 Определить допускаемую мощность, передаваемую одним клиновым ремнем или полклиновым ремнем с десятью клиньям, [Рп], кВт, по формулам:
-для клинового ремня, [Рп] = [Р  ]∙ Ср∙ Сα∙ СL∙Сz;
]∙ Ср∙ Сα∙ СL∙Сz;
- для поликлинового ремня [Рп] = [Р ]∙ Ср∙ Сα∙ СL,
где [Р ] - допускаемая приведенная мощность, передаваемая одним клиновым ремнем или поликлиновым ремнем с десятью клиньями, кВт, выбирается из таблицы 3 в зависимости от типа ремня, его сечения, скорости V, м/с и диаметра ведущего шкива d , мм.
Таблица 3.
| Тип ремня | Сечение | Диаметр ведущего шкива d , мм
| Скорость ремня V, м/с | ||||
| Клиновой нормального сечения |
Z(0)
(L =1320 мм)
| 0,33 | 0,49 | 0,82 | 1,03 | 1,11 | |
| 0,37 | 0,56 | 0,95 | 1,22 | 1,37 | |||
| 0,43 | 0,62 | 1,07 | 1,41 | 1,6 | |||
| 0,49 | 0,67 | 1,16 | 1,56 | 1,73 | |||
| 0,51 | 0,75 | 1,25 | 1,69 | 1,94 | |||
| 0,54 | 0,80 | 1,33 | 1,79 | 2,11 | |||
|
A
(L =1700 мм)
| 0,71 | 0,84 | 1,39 | 1,75 | 1,88 | ||
| 0,72 | 0,95 | 1,60 | 2,07 | 2,31 | |||
| 0,74 | 1,05 | 1,82 | 2,39 | 2,74 | |||
| 0,80 | 1,15 | 2,00 | 2,66 | 3,10 | |||
| 0,87 | 1,26 | 2,17 | 2,91 | 3,42 |
Продолжение табл. 3
|
B
(L =2240 мм)
| 0,95 | 1,39 | 2,26 | 2,80 | - | ||
| 1,04 | 1,61 | 2,70 | 3,45 | 3,83 | |||
| 1,16 | 1,83 | 3,15 | 4,13 | 4,73 | |||
| 1,28 | 2,01 | 3,51 | 4,66 | 5,44 | |||
| 1,40 | 2,10 | 3,73 | 4,95 | 5,95 | |||
| C
(L =1700 мм)
| - | 2,77 | 4,59 | 5,80 | 6,33 | ||
| - | 3,15 | 5,35 | 6,95 | 7,86 | |||
| - | 3,48 | 6,02 | 7,94 | 9,18 | |||
| - | 3,78 | 6,63 | 8,86 | 10,4 | |||
| Поликлиновой | K
(L = 710 мм)
| - | 1,55 | 2,7 | 3,6 | 4,3 | |
| - | 1,65 | 2,9 | 4,0 | 4,8 | |||
| - | 1,86 | 3,4 | 4,6 | 5,7 | |||
| 1,25 | 2,0 | 3,6 | 4,9 | 6,0 | |||
| 1,3 | 2,05 | 3,7 | 5,2 | 6,4 | |||
| Л
(L =1600 мм)
| 2,96 | 4,5 | 7,6 | 9,7 | 10,8 | ||
| 3,2 | 5,0 | 8,6 | 11,2 | 12,7 | |||
| 3,53 | 5,5 | 9,6 | 12,7 | 14,7 | |||
| 3,76 | 5,9 | 10,4 | 13,9 | 16,3 | |||
| 4,04 | 6,3 | 11,0 | 15,0 | 17,8 | |||
| M
(L =2240 мм)
| 9,57 | 14,5 | 24,0 | 30,2 | 32,8 | ||
| 10,56 | 16,3 | 27,7 | 35,8 | 38,3 | |||
| 11,67 | 18,0 | 31,3 | 41,2 | 47,5 |
Поправочные коэффициенты: Ср - режима нагрузки (см. табл. 4), С  -угла обхвата (см. табл. 5), С
-угла обхвата (см. табл. 5), С  - длины ремня (см. табл. 6), Сz - числа ремней в комплекте клиноременной передачи (cм.табл. 7)
- длины ремня (см. табл. 6), Сz - числа ремней в комплекте клиноременной передачи (cм.табл. 7)
Таблица 4.
| Режим нагрузки | Легкий | Средний | Тяжелый | Весьма тяжелый |
| Ср | 1,0 … 1,2 | 1,1 … 1,3 | 1,3 … 1,5 | 1,5 … 1,7 |
Справка: Работа ленточных конвейеров относится к легким режимам; работа цепных конвейеров – к средним режимам; винтовых и скребковых – к тяжелым; экскаваторы, прессы, молоты работают в весьма тяжелом режиме.
Таблица 5.
| α, град. | ||||||||
| С для клиновых и поликлиновых ремней
| 0,98 | 0,95 | 0,92 | 0,89 | 0,86 | 0,82 | 0,78 |
Таблица 6.
| Отношение L/L
| 0,4 | 0,6 | 0,8 | 1,0 | 1,2 | 1,4 | 1,6 | |
|
C
| Для клинового ремня нормального сечения | 0,82 | 0,89 | 0,95 | 1,04 | 1,07 | 1,10 | |
Продолжение табл. 6
| Для поликлинового ремня | 0,85 | 0,91 | 0,96 | 1,03 | 1,06 | 1,08 |
Таблица 7.
| Ожидаемое число ремней Z | 2…3 | 4…5 | |
C 
| 0,95 | 0,90 | 0,85 |
1.13 Определить количество клиновых ремней или число клиньев поликлинового ремня Z:
Z = Рном / [Рп] - число клиновых ремней,
Z = 10 Рном / [Рп] - число клиньев поликлинового ремня.
Здесь Рном - номинальная мощность двигателя, кВт (взять из задачи №1).
[Рп] - допускаемая мощность, передаваемая одним клиновым ремнем или поликлиновым с десятью клиньями, кВт.
Рекомендуется принимать для клиновых ремней Z 5, для поликлинового ремня рекомендуемое число клиньев Z для сечений: К – 2…36, Л – 4 … 20, М – 2…20.
Указание: при необходимости уменьшить расчетное количество ремней (число клиньев) Z, следует увеличить диаметр ведущего шкива d , или перейти на большее сечение ремня.
Проверочный расчет
2.1 Определить силу предварительного натяжения F , Н:
- одного клинового ремня F =  ;
;
-поликлинового ремня F = 
2.2 Определить окружную силу, передаваемую комплектом клиновых ремней или поликлиновым ремнем F  ,Н:
,Н:
Ft = Pном ∙ 103 / V, где Pном берется в кВт.
2.3 Определить силы натяжения ведущей F и ведомой F ветвей, Н:
-одного клинового ремня
 /2 Z; F
/2 Z; F  /2 Z,
/2 Z,
-поликлинового ремня
F = F + F /2; F =  /2.
/2.
2.4 Определить силу давления на вал Fоп, Н:
- для комплекта клиновых ремней
Fоп=2F Z sin  ;
;
-для поликлинового ремня
Fоп =2F sin .
2.5 Проверить прочность одного клинового или поликлинового ремня по максимальным напряжениям в сечении ведущей ветви σ  , Н /мм :
, Н /мм :
σ =  , где
, где
а)  - напряжения растяжения в клиновом ремне;
- напряжения растяжения в клиновом ремне;
 - напряжения растяжения в поликлиновом ремне.
- напряжения растяжения в поликлиновом ремне.
б)  - напряжения изгиба в клиновом ремне;
- напряжения изгиба в клиновом ремне;
 - напряжения изгиба в поликлиновом ремне
- напряжения изгиба в поликлиновом ремне
E  = 80 … 100 Н/мм - модуль продольной упругости при изгибе для прорезиненных ремней; h и H – соответственно высота сечения клинового и поликлинового ремней; мм (см. табл. 2);
= 80 … 100 Н/мм - модуль продольной упругости при изгибе для прорезиненных ремней; h и H – соответственно высота сечения клинового и поликлинового ремней; мм (см. табл. 2);
d - диаметр ведущего шкива, мм.
в)  - напряжения от центробежных сил, Н/мм .
- напряжения от центробежных сил, Н/мм .
 - плотность материала ремня, кг/м
- плотность материала ремня, кг/м  , для клиновых и поликлиновых ремней
, для клиновых и поликлиновых ремней
 1250…1400 кг/м ;
1250…1400 кг/м ;
V- скорость ремня. м/с (см. п. 10);
 -допускаемое напряжение растяжения, Н/мм ;
-допускаемое напряжение растяжения, Н/мм ;
 - 10 Н/мм - для клиновых ремней;
- 10 Н/мм - для клиновых ремней;
-8 Н/мм - для поликлиновых.
Указание. Если в результате расчета получится σ > , то следует увеличить диаметр ведущего шкива d , или принять большее сечение ремня и повторить расчет передачи.
Задача №3
«Конструирование и расчет ведомого вала редуктора»
Цель: ознакомление с основами конструирования ведомого вала редуктора и методикой расчета вала по запасам прочности.
Краткие теоретические основы.
Вал- деталь машин, предназначенная для передачи крутящего момента вдоль своей осевой линии. В большинстве случаев валы поддерживают вращающиеся с ними детали (зубчатые колеса, шкивы, звездочки, полумуфты и др.). Некоторые валы не поддерживают вращающиеся детали (например: гибкие, карданные, торсионные). Валы машин, которые кроме деталей передач несут рабочие органы машины, называются коренными. Коренной вал станков с вращательным движением инструмента или изделия называется шпинделем. Вал, распределяющий механическую энергию по отдельным рабочим машинам, называется трансмиссионным. В отдельных случаях валы могут быть изготовлены как одно целое с цилиндрической или конической шестерней (вал-шестерня) или с червяком (вал-червяк).
По форме геометрической оси валы бывают прямые (Рис.1а, б), коленчатые (Рис.1в) и гибкие (Рис.1г) (с изменяемой формой оси). Простейшие прямые валы имеют форму тел вращения (гладкие и ступенчатые) (Рис.1а, б). Ступенчатые валы являются наиболее распространенными. Для уменьшения массы, или для размещения внутри него других деталей, валы иногда делают полыми (вместо сплошных).
При работе валы всегда вращаются и испытывают деформации кручения или изгиба и кручения.
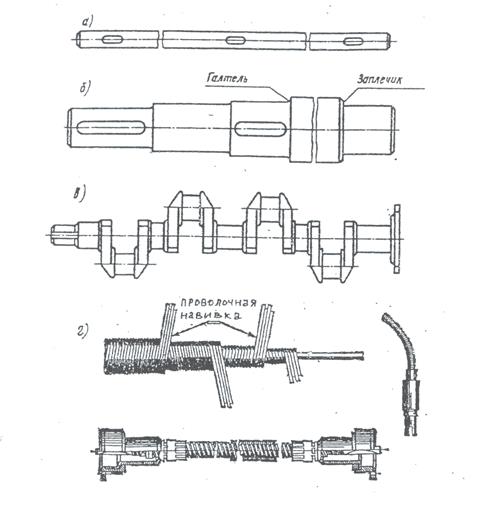
Рис.1
Редукторный вал представляет собой ступенчатое цилиндрическое тело, количество и размеры ступеней которого зависят от количества и размеров, установленных на вал деталей (Рис.2).

Рис.2
d0 - диаметр участка вала под полумуфту, шкив, звездочку цепной передачи (выходной конец вала);
d уп – диаметр участка вала контактирующего с уплотнением,установленным в крышке подшипникового узла (согласуется с ГОСТом на уплотнение);
d п- диаметр участка вала служащего для установки подшипника (согласуется с ГОСТом подшипника);
d к – диаметр участка вала, где устанавливается колесо (шестерня);
d б – диаметр буртика;
t - размер превышения последующей ступени вала;
r – радиус галтели;
f – размер фаски ступицы колеса (шестерни);
Для редуктора заданного варианта привода:
1.Выполнить проектный расчет ведомого вала
2.Выполнить проверочный расчет вала на прочность (расчет на выносливость).