Исходное положение
· Подающий конвейер полностью заполнен заготовками.
· Пневматический цилиндр ПЦ 1 находится в задвинутом положении.
· Зажимные цилиндры ПЦ2 и ПЦ 3 находятся в задвинутом положении.
· Стопорный цилиндр ПЦ 4 находится в задвинутом положении.
Работа пневмосистемы в цикле
1. ПЦ1выдвигается и подает заготовку на запрессовочный стол.
2. Вручную ставим втулку на запрессовочный стол.
3. ПЦ4 выдвигается и его шток выполняет функцию промежуточного упора.
4. ПЦ2 и ПЦ3 выдвигаются навстречу друг другу и запрессовывают втулку в заготовку.
5. ПЦ2 и ПЦ3 задвигаются в исходное положение.
6. ПЦ4 задвигается и тем самым снимает промежуточный упор.
7. ПЦ1 выдвигается и перемещает готовое изделиепо запрессовочному столу на ленту отводящего конвейера.
8. ПЦ1 задвигается и подает сигнал на перемещение отводящего конвейераи подающего конвейера.
9. Начинается следующий робочий цикл.
Циклограмма работы пневмоприводов
1 4 2+3 2+34 1 1
3 РАЗРАБОТКА БЛОК-СХЕМЫПНЕВМОПРИВОДА МАШИНЫ
По составленному в п.2 потактовому описанию работы разрабатываем блок-схему пневмопривода, приведеную на рис.2
 Рисунок 2 - блок-схема пневмопривода устройства
Рисунок 2 - блок-схема пневмопривода устройства
4 ОПИСАНИЕ РАБОТЫПНЕВМОСХЕМЫВ БУЛЕВЫХ ФУНКЦИЯХ
На базе блок-схемы пневмопривода (см. рис.2) и описания работы (см. п.2) составляем следующие уравнения булевых функций:
Y12 = XS
Y41 = X12
Y21 = X42
Y31 = X42
Y22 =X22 & X32
Y32 = X32 & X22
Y42 = X21 & X31
Y11 = X41
Y12 = X12 + XS
5 СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ ПНЕВМОСХЕМЫУСТРОЙСТВА
На базе блок-схемы и булевых функций составляем функциональную схему
 пневмоустройства, приведенную на рис. 3
пневмоустройства, приведенную на рис. 3
Рисунок 3 — Функциональная схема пневмопривода устройства
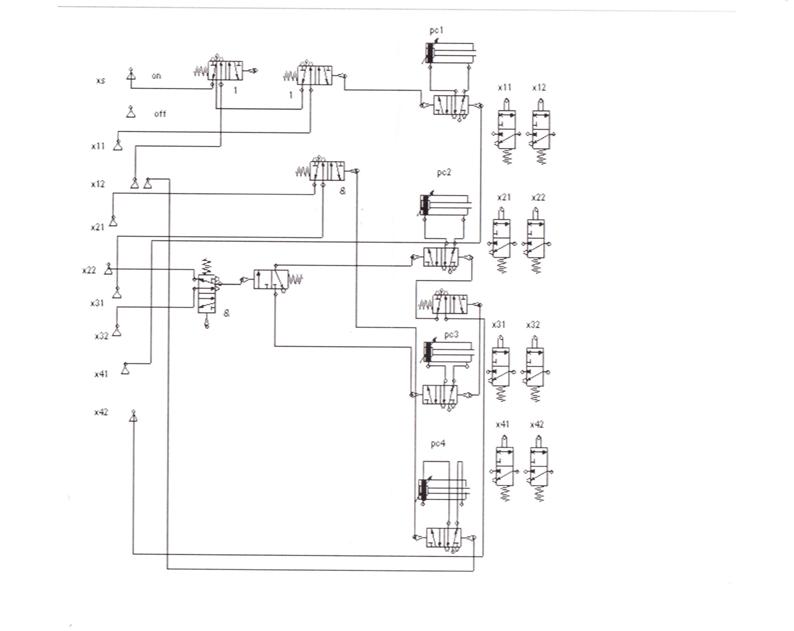 |
6 РЕАЛИЗАЦИЯ СИСТЕМЫУПРАВЛЕНИЯ НА ЭЛЕМЕНТАХ ПНЕВМОАВТОМАТИКИ ВЫСОКОГО ДАВЛЕНИЯ
Рисунок 4 — Принципиальная пневмосхема
7 НОМЕНКЛАТУРНЫЙ ПЕРЕЧЕНЬ ПНЕВМОАППАРАТУРЫ
Таблица 2
| № пп | Название аппарата | Количество | Тип |
| Пневмоцилиндр | |||
| Силовые распределители типа 4/2 с двухсторонним пневмоуправлением | |||
| Пневмораспределители для реализации булевых функций И и ИЛИ – типа 3/2 с односторонним пневмоуправлением. | |||
| Конечные выключатели – пневмораспределители типа 3/2 с механическим управлением |
Анализ номенклатуры показывает что по пунктам 3 и 4 используем один и тот же тип распределителя с разными головками. Выбираем для конечных выключателей пневмораспределители типа П-РК3.4, а для реализации булевых функций – типа В63-13А с односторонним пневматическим управлением.
В качестве силового пневмораспределителя выбираем пневмораспределитель типа В63-13А.
Технические характеристики выбранных пневмораспределителей приведены в таблицах 3 и 4.
Таблица 3 - Техническая характеристика пневмораспределителя B63-13A
| Параметр | Величина |
| Условный проход, мм | |
| Вид присоеденения | резьбовое |
| Номинальное давление, мПа (кгс/см^2) | 0,63(63) |
| Минимальное давление питания, Мпа (кгс/см^2) | 0,25(2,5) |
| Минимальное давление управления, Мпа (кгс/см^2) | 0,25(2,5) |
| Пропускная способность м^3/ч, не менее | 1,9 |
| Максимальное число включений в минуту | |
| Утечки вздуха из-под золотника при номинальном давлении см^3/мин, не более | |
| Полный 90%-ный ресурс, циклов, не менее | 10^7 |
| 90%-ная наработка до отказа, циклов, не менее | 2,5*10^6 |
| Масса, кг, не более | 1,6 |
Таблица 4 -Техническая характеристика П-РК3.4
| Параметр | Величина |
| Условный проход, мм | |
| Номинальное давление, мПа (кгс/см^2) | 1,0(10) |
| Минимальное давление управления, Мпа (кгс/см^2) | ----- |
| Пропускная способность м^3/ч, не менее | 0,24 |
| Усилие необходимое для переклчения, H (кгс) не более | 30(3) |
| Максимальная частота включения, с^-1 | |
| Утечка воздуха, м^3/мин, не более | 2*10^-5 |
| Полный 90%-ный ресурс, циклов, не менее | 2,6*10^6 |
| 90%-ная наработка до отказа, циклов, не менее | 0,6*10^6 |
| Масса, кг, не более | 0,12 |
8 РАЗРАБОТКА ПРОГРАММЫДЛЯ УПРАВЛЕНИЯ ПНЕВМОСИСТЕМЫОТ МИКРОКОНТРОЛЛЕРА МКП 1
| Адрес команды | Код операции | Операнд | Содержание |
| Исходное положение | |||
| ООО | О6 | 1 2 | ПЦ 1 задвигается |
| OO1 | О5 | 1 1 | |
| OO2 | О6 | 2 2 | ПЦ 2 задвигается |
| OO3 | О5 | 2 1 | |
| OO4 | О6 | 3 2 | ПЦ 3 задвигается |
| OO5 | О5 | 3 1 | |
| Цикл | |||
| OO6 | О6 | 1 1 | ПЦ 1 выдвигается |
| OO7 | О5 | 1 2 | |
| OO8 | О6 | 4 1 | ПЦ 4 выдвигается |
| OO9 | О5 | 4 2 | |
| OOA | О6 | 2 1 | ПЦ 2 выдвигается |
| OOB | О5 | 2 2 | |
| OOC | О6 | 3 1 | ПЦ 3 выдвигается |
| OOD | О5 | 3 2 | |
| OOE | О6 | 2 2 | ПЦ 2 задвигается |
| OOF | О5 | 2 1 | |
| O1O | О6 | 3 2 | ПЦ 3 задвигается |
| O11 | О5 | 3 1 | |
| O12 | О6 | 4 2 | ПЦ 4 задвигается |
| O13 | О5 | 4 1 | |
| O14 | О6 | 1 1 | ПЦ 1 выдвигается |
| O15 | О5 | 1 2 | |
| O16 | О6 | 1 2 | ПЦ 1 задвигается |
| O17 | О5 | 1 1 | |
| O18 | О9 | О6 | Начало следующего цикла |
СПИСОК ИСПОЛЬЗОВАННОЙ ЛИТЕРАТУРЫ
1. Методическое указание к лабораторно-практическим работам “управление автоматическими манипуляторами и технологическим оборудованием от програмируемого микроконтроллера МКП-1” по курсу ”управляющие и вычислительные устройства автоматических манипуляторов”/Седач В.В., Пелюхня Р. Н., Крутиков Г. А.
2. Handling Pneumatics. Пневмоавтоматика: 99 примеров применения/ Стефан Хоссе.
3. Пневматические устройства и системы в машиностроении: Справочник / Е.В. Герц, А.И. Кудрявцев, О.В. Ложкин и др. под общ. ред. Е.В. Герц — М.: Машиностроение, 1981.- 408с.